- 异物检测的计算机视觉算法技术路线
思绪漂移
计算机视觉算法人工智能
异物检测的计算机视觉算法技术路线在现代智能监测系统中,异物检测有着其必要性和运维重要性,通过计算机视觉算法,可以实时识别各种异常物体,为设备安全运行提供有力保障。本文将介绍异物检测的主要技术路线。一、分类识别适应场景分类识别技术主要适用于已知目标类别的异物检测场景。在运维环境中,这类场景包括:固定区域内的障碍物监测(如轨道区域的石块、工具、动物等)关键部件的异物附着检测(如固定装置上的杂物)安全通
- [特殊字符] AlphaGo:“神之一手”背后的智能革命与人机博弈新纪元
大千AI助手
人工智能Python#OTHER人工智能算法数据挖掘机器学习alphagogoogle围棋
从围棋棋盘到科学前沿的通用人工智能范式突破本文由「大千AI助手」原创发布,专注用真话讲AI,回归技术本质。拒绝神话或妖魔化。搜索「大千AI助手」关注我,一起撕掉过度包装,学习真实的AI技术!一、核心定义与历史意义AlphaGo是由谷歌DeepMind团队开发的围棋人工智能程序,其里程碑意义在于:首破人类围棋壁垒:2016年以4:1击败世界冠军李世石九段,成为首个在完整对局中战胜人类顶尖棋手的AI。
- 隐马尔可夫模型(HMM):观测背后的状态解码艺术
大千AI助手
人工智能Python#OTHER数据挖掘人工智能机器学习算法HMM马尔科夫概率论
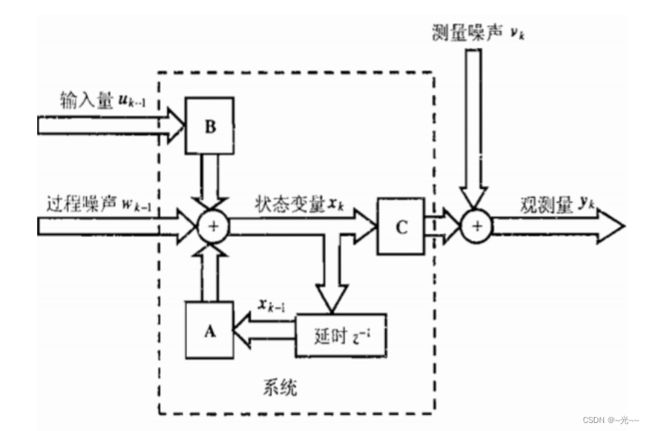
本文由「大千AI助手」原创发布,专注用真话讲AI,回归技术本质。拒绝神话或妖魔化。搜索「大千AI助手」关注我,一起撕掉过度包装,学习真实的AI技术!一、核心概念:双重随机过程隐马尔可夫模型(HiddenMarkovModel,HMM)是一种通过可观测序列推断隐含状态序列的概率图模型,包含两个核心随机过程:隐含状态链:不可观测的马尔可夫过程${q_t}$P(qt∣qt−1,qt−2,…,q1)=P(
- PageRank:互联网的马尔可夫链平衡态
大千AI助手
人工智能Python#OTHER人工智能机器学习条件概率贝叶斯PageRank马尔科夫链MC
本文由「大千AI助手」原创发布,专注用真话讲AI,回归技术本质。拒绝神话或妖魔化。搜索「大千AI助手」关注我,一起撕掉过度包装,学习真实的AI技术!PageRank算法本质上是一个在网页图上定义的离散时间马尔可夫链(DTMC),其核心思想是将网页间的链接关系转化为状态转移概率。以下是详细分析:一、马尔可夫链的核心要素在PageRank中的体现马尔可夫链要素PageRank对应数学描述状态空间网页集
- MCMC:高维概率采样的“随机游走”艺术
大千AI助手
人工智能Python#OTHER人工智能数据挖掘机器学习算法MCMC马尔科夫概率论
MCMC(马尔可夫链蒙特卡洛)是一种从复杂概率分布中高效采样的核心算法,它解决了传统采样方法在高维空间中的“维度灾难”问题。以下是其技术本质、关键算法及实践的深度解析:本文由「大千AI助手」原创发布,专注用真话讲AI,回归技术本质。拒绝神话或妖魔化。搜索「大千AI助手」关注我,一起撕掉过度包装,学习真实的AI技术!一、MCMC要解决的核心问题目标:从目标分布(π(x)\pi(\mathbf{x})
- LeetCode 刷题:数据结构与算法的实战经验分享
LeetCode刷题:数据结构与算法的实战经验分享关键词:LeetCode、数据结构、算法、刷题经验、实战摘要:本文将围绕LeetCode刷题展开,深入探讨数据结构与算法在实际刷题过程中的应用。通过分享实战经验,帮助读者更好地理解和掌握数据结构与算法知识,提升解题能力。文章将从背景介绍入手,阐述刷题的目的和意义,接着详细解释核心概念,分析它们之间的关系,然后介绍核心算法原理和具体操作步骤,结合数学
- 量化价值投资中的深度学习技术:TensorFlow实战
量化价值投资中的深度学习技术:TensorFlow实战关键词:量化价值投资,深度学习,TensorFlow,股票预测,因子模型,LSTM神经网络,量化策略摘要:本文将带你走进"量化价值投资"与"深度学习"的交叉地带,用小学生都能听懂的语言解释复杂概念,再通过手把手的TensorFlow实战案例,教你如何用AI技术挖掘股票市场中的价值宝藏。我们会从传统价值投资的痛点出发,揭示深度学习如何像"超级分析
- 高压电缆护层电流监测系统的技术实现
李子圆圆
人工智能
目录文章目录概要高精度电流监测的技术实现多级预警机制的构建逻辑极端环境下的稳定运行技术远程运维的技术支撑概要高压电缆护层作为电力传输的关键防护结构,其接地电流的异常变化是判断设备状态的重要指标。TLKS-PLGD高压电缆护层电流监测系统通过传感器技术与智能算法的结合,构建了一套完整的电缆安全监测方案。高精度电流监测的技术实现高精度电流监测的技术实现护层电流监测的核心在于数据采集的精准性。该系统采用
- OpenWebUI(8)源码学习-后端utils/telemetry追踪遥测模块
目录目录结构说明`constants.py`核心作用:主要功能:示例代码片段:`exporters.py`核心作用:主要类:`LazyBatchSpanProcessor`特点:技术亮点:`instrumentors.py`核心作用:插桩对象包括:钩子函数(Hooks):Instrumentor类:插桩流程:`setup.py`核心作用:主要功能:典型调用方式:✨总体架构与价值技术亮点总结✅开发建
- 构建安全密码存储策略:核心原则与最佳实践
weixin_47233946
信息安全安全
密码是用户身份认证的第一道防线,其存储安全性直接关系到用户隐私和企业信誉。近年来频发的数据泄露事件揭示了密码管理的关键性。本文将深入探讨从加密算法到系统性防护的完整密码存储方案,帮助开发者构建企业级安全防御体系。一、密码存储基本准则绝对禁止明文存储:即使采用数据库加密措施,直接存储用户原始密码仍存在不可逆泄露风险。运维人员权限滥用或备份文件泄露都可能成为突破口。加密≠安全:AES等对称加密存在密钥
- 数据结构实验解析(C++版)——实验一 复杂度分析
拯救三金
数据结构c++算法
目录一、实验例题例题1例题2二、实验原理与背景知识1、实验原理2、背景知识三、解题思路与算法1、解题思路2、算法四、代码实现例题1代码例题2代码五、实验结果分析与总结1、实验结果分析2、该实验与数据结构的联系一、实验例题例题1时间空间限制时间限制:1SEC空间限制:128MB问题描述分析以下代码:for(i=1;iusingnamespacestd;intmain(){longlongn;//输入
- S7-300 400与S7-200 SMART PLC以太网通讯(S7协议)资源文件介绍
滑展妙Bernice
S7-300400与S7-200SMARTPLC以太网通讯(S7协议)资源文件介绍【下载地址】S7-300400与S7-200SMARTPLC以太网通讯S7协议资源文件介绍本资源文件详细解析了S7-300400与S7-200SMARTPLC通过以太网进行通讯的技术细节,涵盖硬件连接、软件配置及通讯调试等关键环节。通过学习,您将掌握S7协议在PLC通讯中的实际应用,提升自动化与电气工程领域的专业技能
- Spring Data Neo4j 与后端人工智能算法的数据交互
AI大模型应用实战
springneo4j人工智能ai
SpringDataNeo4j与后端人工智能算法的数据交互关键词:SpringDataNeo4j、图数据库、人工智能算法、数据交互、知识图谱、图神经网络、数据集成摘要:本文深入探讨了如何利用SpringDataNeo4j框架实现后端人工智能算法与图数据库的高效数据交互。文章首先介绍了图数据库和人工智能算法的基本概念,然后详细解析了SpringDataNeo4j的核心架构和原理。接着,通过实际代码示
- 【数据结构】复杂度分析
目录一、算法1.基本概念2.描述方法3.算法效率二、算法的时间复杂度三、算法的空间复杂度一、算法1.基本概念通俗的讲,算法是解决问题的方法,比如在现实生活中一道菜谱,一个安装轮椅的操作指南等。严格的说,算法是对特定问题求解步骤的一种描述,是指令的有限序列。算法具有的基本特性有:(1)有穷性。一个算法必须总是在执行有穷步之后结束,且每一步都在有求时间内完成。(2)确定性。算法中的每一条指令必须有确切
- ResNet:深度卷积神经网络的里程碑
心想事“程”
小知识点cnn人工智能神经网络
一、引言在深度学习的发展历程中,深度卷积神经网络(CNN)不断演进,旨在提升对图像等数据的特征提取与分类能力。然而,随着网络层数的增加,传统CNN面临着梯度消失、梯度爆炸以及退化等棘手问题,训练变得愈发困难。2015年,由微软研究院提出的ResNet(ResidualNetworks,残差网络)横空出世,它以独特的残差学习思想,成功攻克了这些难题,在ImageNet竞赛中大放异彩,开创了深度神经网
- Go - 项目收藏
1、谷歌官方维护了一个基于go语言的开源项目列表:https://github.com/golang/go/wiki/Projects2、[知乎网]有哪些值得学习的Go语言开源项目?3、[知乎用户:hackstoic]看过awesome-go项目,汇总了很多go开源项目。但是awesome-go收集了太全了,而且每个项目没有描述。因此我自己根据go语言中文社区提供的资料,还有互联网企业架构设计中的
- 视觉算法之卷积神经网络
清风AI
深度学习算法详解及代码复现计算机视觉cnn神经网络深度学习python课程设计毕业设计
定义与特点卷积神经网络(ConvolutionalNeuralNetwork,CNN)是一种专为处理具有网格结构的数据而设计的深度学习模型。其独特的结构和功能使其在图像处理、语音识别等领域展现出卓越的性能:CNN的核心设计理念源于对生物视觉系统的模仿。通过模拟大脑皮层中视网膜和视觉皮层的层次化结构,CNN能够有效地捕捉图像中的局部特征并逐步抽象为高层语义信息。这种设计使得CNN特别擅长处理图像和音
- 卷积神经网络架构的演进:从AlexNet到EfficientNet
t0_54manong
大数据与人工智能cnn架构人工智能个人开发
在过去的8.5年里,深度学习取得了飞速的进步。回溯到2012年,AlexNet在ImageNet上的Top-1准确率仅为63.3%,而如今,借助EfficientNet架构和师生训练法,我们已经能达到超过90%的准确率。本文将聚焦于卷积神经网络(CNN)架构的演变,深入探究其背后的基本原理。一些关键术语在深入了解各种架构之前,我们需要明确几个关键术语。更宽的网络意味着卷积层中有更多的特征图(滤波器
- 心理健康语音分析AI模型:开启心理评估新时代
AI大模型应用实战
人工智能语音识别ai
心理健康语音分析AI模型:开启心理评估新时代关键词:心理健康评估、语音信号处理、情感计算、AI模型、多模态融合摘要:传统心理评估依赖量表问卷和人工观察,存在主观性强、效率低、难以实时监测等局限。本文将带您走进“心理健康语音分析AI模型”的世界,从基础概念到核心技术,从算法原理到实战案例,揭秘AI如何通过“听声音”读懂心理状态,开启心理评估的智能化新时代。背景介绍目的和范围心理健康问题已成为全球公共
- MacOS系统安装Docker(非常详细)从零基础入门到精通,看完这一篇就够了_mac安装docker
2501_90249219
dockereureka容器
选择默认配置就行,Docker会自动设置一些大多数开发人员必要的配置。这里我们跳过就好。运行Docker在应用程序中找到Docker程序图标,点击以启动Docker,启动之后我们会发现右上角工具栏中多了一个小鲸鱼的图片,这个就是Docker啦~真的好可爱~Docker桌面应用程序打开后,就是首页的学习中心界面。通过小鲸鱼中的AboutDockerDesktop可以查看Docker的版本可以看到版本
- 【AI大模型】深入解析预训练:大模型时代的核心引擎
我爱一条柴ya
学习AI记录深度学习人工智能aipythonAI编程算法
预训练已成为现代人工智能,尤其是自然语言处理和计算机视觉领域的基石技术。它彻底改变了模型开发范式,催生了BERT、GPT等革命性模型。本文将系统阐述预训练的核心概念、原理、方法、应用及挑战。一、预训练的本质:为何需要它?核心问题:数据标注的瓶颈监督学习依赖海量高质量标注数据,获取成本极高(时间、金钱、专业知识)。对于复杂任务(如理解语义、生成文本),标注难度呈指数级上升。标注数据稀缺导致模型泛化能
- MySQL存储结构深度解析:Buffer Pool与Page管理
hdzw20
mysql复习mysql数据库
MySQL存储结构解析:BufferPool与Page管理在MySQL的InnoDB存储引擎中,BufferPool是其核心组件之一,它极大地提升了数据库的性能。理解BufferPool的内部结构和工作机制,对于优化MySQL数据库至关重要。本文将讨论BufferPool的结构、三大链表、改进型LRU算法以及ChangeBuffer机制。1.BufferPool结构:控制块与缓存页BufferPo
- Python爬虫小白入门指南,成为大牛必须经历的三个阶段
学习任何一门技术,都应该带着目标去学习,目标就像一座灯塔,指引你前进,很多人学着学着就学放弃了,很大部分原因是没有明确目标,所以,一定要明确学习目的,在你准备学爬虫前,先问问自己为什么要学习爬虫。有些人是为了一份工作,有些人是为了好玩,也有些人是为了实现某个黑科技功能。不过可以肯定的是,学会了爬虫能给你的工作提供很多便利。小白入门必读作为零基础小白,大体上可分为三个阶段去实现。第一阶段是入门,掌握
- 语言模型 RLHF 实践指南(一):策略网络、价值网络与 PPO 损失函数
在使用ProximalPolicyOptimization(PPO)对语言模型进行强化学习微调(如RLHF)时,大家经常会问:策略网络的动作概率是怎么来的?价值网络的得分是如何计算的?奖励从哪里来?损失函数怎么构建?微调后的旧轨迹还能用吗?这篇文章将以语言模型强化学习微调为例,结合实际实现和数学公式,深入解析PPO的关键计算流程。1️⃣策略网络:如何计算动作概率?策略网络πθ(a∣s)\pi_\t
- Python通关秘籍之基础教程(一)
Smile丶Life丶
Python通关指南:从零基础到高手之路python开发语言后端
引言在编程的世界里,Python就像一位温和而强大的导师,它以简洁优雅的语法和强大的功能吸引着无数初学者和专业人士。无论你是想开发网站、分析数据、构建人工智能,还是仅仅想学习编程思维,Python都是你的理想选择。Python的魅力在于它的易读性和广泛的应用场景。它的代码就像英语句子一样自然,即使是完全没有编程经验的人也能快速上手。同时,Python拥有庞大的生态系统,从Web开发(Django、
- 多模态大模型发展全景:从架构创新到应用突破
陈敬雷-充电了么-CEO兼CTO
python大模型多模态大模型AIGC机器学习深度学习DeepSeek
注:此文章内容均节选自充电了么创始人,CEO兼CTO陈敬雷老师的新书《GPT多模态大模型与AIAgent智能体》(跟我一起学人工智能)【陈敬雷编著】【清华大学出版社】《GPT多模态大模型与AIAgent智能体》新出书籍配套视频【陈敬雷】推荐算法系统实战全系列精品课【陈敬雷】文章目录GPT多模态大模型系列四多模态大模型发展全景:从架构创新到应用突破更多技术内容总结GPT多模态大模型系列四多模态大模型
- Python异步编程终极指南:用协程与事件循环重构你的高并发系统
title:Python异步编程终极指南:用协程与事件循环重构你的高并发系统date:2025/2/24updated:2025/2/24author:cmdragonexcerpt:深入剖析Python异步编程的核心机制。你将掌握:\n事件循环的底层实现原理与调度算法\nasync/await协程的6种高级用法模式\n异步HTTP请求的性能优化技巧(速度提升15倍+)\n常见异步陷阱的26种解决
- Vue3 学习教程,从入门到精通,使用 VSCode 开发 Vue3 的详细指南(3)
知识分享小能手
前端开发vue3网页开发学习前端javascriptvue.jsvue3vue前端框架
使用VSCode开发Vue3的详细指南本文将详细介绍如何使用VisualStudioCode(VSCode)开发Vue3项目,包括创建项目、打开项目、运行第一个入门程序,并涵盖关键的语法知识点及使用方法。每个知识点都将提供具体的案例代码,并附有详细注释。此外,还将提供一些入门案例,帮助您快速上手Vue3开发。目录准备工作创建Vue3项目在VSCode中打开Vue3项目运行第一个入门程序Vue3关键
- Three.js引擎开发:Three.js动画系统实现_(9).Three.js中的骨骼动画实现
chenlz2007
游戏开发javascriptnginx开发语言vr性能优化ecmascript前端
Three.js中的骨骼动画实现在上一节中,我们介绍了如何在Three.js中加载和显示3D模型。接下来,我们将深入探讨如何在Three.js中实现骨骼动画。骨骼动画是一种高级的动画技术,它通过控制模型的骨骼来驱动模型的动画,广泛应用于虚拟角色的动画制作。在本节中,我们将学习如何在Three.js中实现骨骼动画,包括骨骼动画的基本原理、如何加载带有骨骼的模型、如何创建和控制动画混合器(Animat
- 突破性能瓶颈,几个高性能Python网络框架,高效实现网络应用
引言随着互联网和大数据时代的到来,高性能网络应用的需求日益增加。Python作为一种流行的编程语言,在高性能网络编程领域也具有广泛的应用。本文将深入探讨基于Python的几种高性能网络框架,分析它们各自的优势和适用场景,帮助开发者选择最适合自己需求的网络框架这里插播一条粉丝福利,如果你正在学习Python或者有计划学习Python,想要突破自我,对未来十分迷茫的,可以点击这里获取最新的Python
- 关于旗正规则引擎中的MD5加密问题
何必如此
jspMD5规则加密
一般情况下,为了防止个人隐私的泄露,我们都会对用户登录密码进行加密,使数据库相应字段保存的是加密后的字符串,而非原始密码。
在旗正规则引擎中,通过外部调用,可以实现MD5的加密,具体步骤如下:
1.在对象库中选择外部调用,选择“com.flagleader.util.MD5”,在子选项中选择“com.flagleader.util.MD5.getMD5ofStr({arg1})”;
2.在规
- 【Spark101】Scala Promise/Future在Spark中的应用
bit1129
Promise
Promise和Future是Scala用于异步调用并实现结果汇集的并发原语,Scala的Future同JUC里面的Future接口含义相同,Promise理解起来就有些绕。等有时间了再仔细的研究下Promise和Future的语义以及应用场景,具体参见Scala在线文档:http://docs.scala-lang.org/sips/completed/futures-promises.html
- spark sql 访问hive数据的配置详解
daizj
spark sqlhivethriftserver
spark sql 能够通过thriftserver 访问hive数据,默认spark编译的版本是不支持访问hive,因为hive依赖比较多,因此打的包中不包含hive和thriftserver,因此需要自己下载源码进行编译,将hive,thriftserver打包进去才能够访问,详细配置步骤如下:
1、下载源码
2、下载Maven,并配置
此配置简单,就略过
- HTTP 协议通信
周凡杨
javahttpclienthttp通信
一:简介
HTTPCLIENT,通过JAVA基于HTTP协议进行点与点间的通信!
二: 代码举例
测试类:
import java
- java unix时间戳转换
g21121
java
把java时间戳转换成unix时间戳:
Timestamp appointTime=Timestamp.valueOf(new SimpleDateFormat("yyyy-MM-dd HH:mm:ss").format(new Date()))
SimpleDateFormat df = new SimpleDateFormat("yyyy-MM-dd hh:m
- web报表工具FineReport常用函数的用法总结(报表函数)
老A不折腾
web报表finereport总结
说明:本次总结中,凡是以tableName或viewName作为参数因子的。函数在调用的时候均按照先从私有数据源中查找,然后再从公有数据源中查找的顺序。
CLASS
CLASS(object):返回object对象的所属的类。
CNMONEY
CNMONEY(number,unit)返回人民币大写。
number:需要转换的数值型的数。
unit:单位,
- java jni调用c++ 代码 报错
墙头上一根草
javaC++jni
#
# A fatal error has been detected by the Java Runtime Environment:
#
# EXCEPTION_ACCESS_VIOLATION (0xc0000005) at pc=0x00000000777c3290, pid=5632, tid=6656
#
# JRE version: Java(TM) SE Ru
- Spring中事件处理de小技巧
aijuans
springSpring 教程Spring 实例Spring 入门Spring3
Spring 中提供一些Aware相关de接口,BeanFactoryAware、 ApplicationContextAware、ResourceLoaderAware、ServletContextAware等等,其中最常用到de匙ApplicationContextAware.实现ApplicationContextAwaredeBean,在Bean被初始后,将会被注入 Applicati
- linux shell ls脚本样例
annan211
linuxlinux ls源码linux 源码
#! /bin/sh -
#查找输入文件的路径
#在查找路径下寻找一个或多个原始文件或文件模式
# 查找路径由特定的环境变量所定义
#标准输出所产生的结果 通常是查找路径下找到的每个文件的第一个实体的完整路径
# 或是filename :not found 的标准错误输出。
#如果文件没有找到 则退出码为0
#否则 即为找不到的文件个数
#语法 pathfind [--
- List,Set,Map遍历方式 (收集的资源,值得看一下)
百合不是茶
listsetMap遍历方式
List特点:元素有放入顺序,元素可重复
Map特点:元素按键值对存储,无放入顺序
Set特点:元素无放入顺序,元素不可重复(注意:元素虽然无放入顺序,但是元素在set中的位置是有该元素的HashCode决定的,其位置其实是固定的)
List接口有三个实现类:LinkedList,ArrayList,Vector
LinkedList:底层基于链表实现,链表内存是散乱的,每一个元素存储本身
- 解决SimpleDateFormat的线程不安全问题的方法
bijian1013
javathread线程安全
在Java项目中,我们通常会自己写一个DateUtil类,处理日期和字符串的转换,如下所示:
public class DateUtil01 {
private SimpleDateFormat dateformat = new SimpleDateFormat("yyyy-MM-dd HH:mm:ss");
public void format(Date d
- http请求测试实例(采用fastjson解析)
bijian1013
http测试
在实际开发中,我们经常会去做http请求的开发,下面则是如何请求的单元测试小实例,仅供参考。
import java.util.HashMap;
import java.util.Map;
import org.apache.commons.httpclient.HttpClient;
import
- 【RPC框架Hessian三】Hessian 异常处理
bit1129
hessian
RPC异常处理概述
RPC异常处理指是,当客户端调用远端的服务,如果服务执行过程中发生异常,这个异常能否序列到客户端?
如果服务在执行过程中可能发生异常,那么在服务接口的声明中,就该声明该接口可能抛出的异常。
在Hessian中,服务器端发生异常,可以将异常信息从服务器端序列化到客户端,因为Exception本身是实现了Serializable的
- 【日志分析】日志分析工具
bit1129
日志分析
1. 网站日志实时分析工具 GoAccess
http://www.vpsee.com/2014/02/a-real-time-web-log-analyzer-goaccess/
2. 通过日志监控并收集 Java 应用程序性能数据(Perf4J)
http://www.ibm.com/developerworks/cn/java/j-lo-logforperf/
3.log.io
和
- nginx优化加强战斗力及遇到的坑解决
ronin47
nginx 优化
先说遇到个坑,第一个是负载问题,这个问题与架构有关,由于我设计架构多了两层,结果导致会话负载只转向一个。解决这样的问题思路有两个:一是改变负载策略,二是更改架构设计。
由于采用动静分离部署,而nginx又设计了静态,结果客户端去读nginx静态,访问量上来,页面加载很慢。解决:二者留其一。最好是保留apache服务器。
来以下优化:
- java-50-输入两棵二叉树A和B,判断树B是不是A的子结构
bylijinnan
java
思路来自:
http://zhedahht.blog.163.com/blog/static/25411174201011445550396/
import ljn.help.*;
public class HasSubtree {
/**Q50.
* 输入两棵二叉树A和B,判断树B是不是A的子结构。
例如,下图中的两棵树A和B,由于A中有一部分子树的结构和B是一
- mongoDB 备份与恢复
开窍的石头
mongDB备份与恢复
Mongodb导出与导入
1: 导入/导出可以操作的是本地的mongodb服务器,也可以是远程的.
所以,都有如下通用选项:
-h host 主机
--port port 端口
-u username 用户名
-p passwd 密码
2: mongoexport 导出json格式的文件
- [网络与通讯]椭圆轨道计算的一些问题
comsci
网络
如果按照中国古代农历的历法,现在应该是某个季节的开始,但是由于农历历法是3000年前的天文观测数据,如果按照现在的天文学记录来进行修正的话,这个季节已经过去一段时间了。。。。。
也就是说,还要再等3000年。才有机会了,太阳系的行星的椭圆轨道受到外来天体的干扰,轨道次序发生了变
- 软件专利如何申请
cuiyadll
软件专利申请
软件技术可以申请软件著作权以保护软件源代码,也可以申请发明专利以保护软件流程中的步骤执行方式。专利保护的是软件解决问题的思想,而软件著作权保护的是软件代码(即软件思想的表达形式)。例如,离线传送文件,那发明专利保护是如何实现离线传送文件。基于相同的软件思想,但实现离线传送的程序代码有千千万万种,每种代码都可以享有各自的软件著作权。申请一个软件发明专利的代理费大概需要5000-8000申请发明专利可
- Android学习笔记
darrenzhu
android
1.启动一个AVD
2.命令行运行adb shell可连接到AVD,这也就是命令行客户端
3.如何启动一个程序
am start -n package name/.activityName
am start -n com.example.helloworld/.MainActivity
启动Android设置工具的命令如下所示:
# am start -
- apache虚拟机配置,本地多域名访问本地网站
dcj3sjt126com
apache
现在假定你有两个目录,一个存在于 /htdocs/a,另一个存在于 /htdocs/b 。
现在你想要在本地测试的时候访问 www.freeman.com 对应的目录是 /xampp/htdocs/freeman ,访问 www.duchengjiu.com 对应的目录是 /htdocs/duchengjiu。
1、首先修改C盘WINDOWS\system32\drivers\etc目录下的
- yii2 restful web服务[速率限制]
dcj3sjt126com
PHPyii2
速率限制
为防止滥用,你应该考虑增加速率限制到您的API。 例如,您可以限制每个用户的API的使用是在10分钟内最多100次的API调用。 如果一个用户同一个时间段内太多的请求被接收, 将返回响应状态代码 429 (这意味着过多的请求)。
要启用速率限制, [[yii\web\User::identityClass|user identity class]] 应该实现 [[yii\filter
- Hadoop2.5.2安装——单机模式
eksliang
hadoophadoop单机部署
转载请出自出处:http://eksliang.iteye.com/blog/2185414 一、概述
Hadoop有三种模式 单机模式、伪分布模式和完全分布模式,这里先简单介绍单机模式 ,默认情况下,Hadoop被配置成一个非分布式模式,独立运行JAVA进程,适合开始做调试工作。
二、下载地址
Hadoop 网址http:
- LoadMoreListView+SwipeRefreshLayout(分页下拉)基本结构
gundumw100
android
一切为了快速迭代
import java.util.ArrayList;
import org.json.JSONObject;
import android.animation.ObjectAnimator;
import android.os.Bundle;
import android.support.v4.widget.SwipeRefreshLayo
- 三道简单的前端HTML/CSS题目
ini
htmlWeb前端css题目
使用CSS为多个网页进行相同风格的布局和外观设置时,为了方便对这些网页进行修改,最好使用( )。http://hovertree.com/shortanswer/bjae/7bd72acca3206862.htm
在HTML中加入<table style=”color:red; font-size:10pt”>,此为( )。http://hovertree.com/s
- overrided方法编译错误
kane_xie
override
问题描述:
在实现类中的某一或某几个Override方法发生编译错误如下:
Name clash: The method put(String) of type XXXServiceImpl has the same erasure as put(String) of type XXXService but does not override it
当去掉@Over
- Java中使用代理IP获取网址内容(防IP被封,做数据爬虫)
mcj8089
免费代理IP代理IP数据爬虫JAVA设置代理IP爬虫封IP
推荐两个代理IP网站:
1. 全网代理IP:http://proxy.goubanjia.com/
2. 敲代码免费IP:http://ip.qiaodm.com/
Java语言有两种方式使用代理IP访问网址并获取内容,
方式一,设置System系统属性
// 设置代理IP
System.getProper
- Nodejs Express 报错之 listen EADDRINUSE
qiaolevip
每天进步一点点学习永无止境nodejs纵观千象
当你启动 nodejs服务报错:
>node app
Express server listening on port 80
events.js:85
throw er; // Unhandled 'error' event
^
Error: listen EADDRINUSE
at exports._errnoException (
- C++中三种new的用法
_荆棘鸟_
C++new
转载自:http://news.ccidnet.com/art/32855/20100713/2114025_1.html
作者: mt
其一是new operator,也叫new表达式;其二是operator new,也叫new操作符。这两个英文名称起的也太绝了,很容易搞混,那就记中文名称吧。new表达式比较常见,也最常用,例如:
string* ps = new string("
- Ruby深入研究笔记1
wudixiaotie
Ruby
module是可以定义private方法的
module MTest
def aaa
puts "aaa"
private_method
end
private
def private_method
puts "this is private_method"
end
end