【深度学习】注意力机制(一)
本文介绍一些注意力机制的实现,包括SE/ECA/GE/A2-Net/GC/CBAM。
【深度学习】注意力机制(二)
【深度学习】注意力机制(三)
【深度学习】注意力机制(四)
【深度学习】注意力机制(五)
目录
一、SE(Squeeze-and-Excitation)
二、ECA(Efficient Channel Attention)
三、GE(Gather-Excite)
四、A2-Net(Double Attention Networks)
五、GCNet(Global Context)
六、CBAM(Convolutional Block Attention Module)
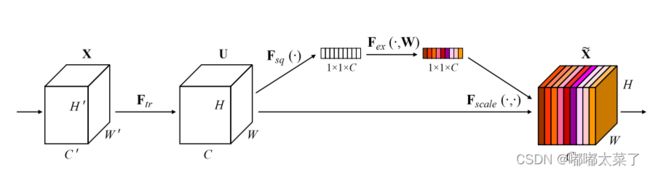
一、SE(Squeeze-and-Excitation)
SE是通道注意力机制,论文地址:论文地址
SE模块流程:
1、输入特征图经过自适应池化变为NC11的特征图,特征图resize为NC;
2、经过全连接层和Relu、sigmoid生成权重;
3、将权重和输入特征图相乘。
如下所示:
torch代码实现:
import numpy as np
import torch
from torch import nn
from torch.nn import init
class SEAttention(nn.Module):
def __init__(self, channel=512,reduction=16):
super().__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(channel, channel // reduction, bias=False),
nn.ReLU(inplace=True),
nn.Linear(channel // reduction, channel, bias=False),
nn.Sigmoid()
)
def init_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
init.kaiming_normal_(m.weight, mode='fan_out')
if m.bias is not None:
init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
init.constant_(m.weight, 1)
init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
init.normal_(m.weight, std=0.001)
if m.bias is not None:
init.constant_(m.bias, 0)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y.expand_as(x)二、ECA(Efficient Channel Attention)
ECA是通道注意力机制,论文:论文地址
ECA模块过程:
1、使用自适应池化将NCHW的特征图变为N1C的特征图(自适应池化、squeeze、transpose);
2、使用1D卷积生成N1C的特征图(在C通道做卷积),将经过1D卷积的特征图变为NC11(transpose、unsqueeze);
3、特征图通过sigmoid,生成NC11的权重,将权重与原特征图相乘;
如下图:

torch代码:
import torch
from torch import nn
from torch.nn.parameter import Parameter
class ECALayer(nn.Module):
"""Constructs a ECA module.
Args:
channel: Number of channels of the input feature map
k_size: Adaptive selection of kernel size
"""
def __init__(self, channel, k_size=3):
super(eca_layer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.conv = nn.Conv1d(1, 1, kernel_size=k_size, padding=(k_size - 1) // 2, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# feature descriptor on the global spatial information
y = self.avg_pool(x)
# Two different branches of ECA module
y = self.conv(y.squeeze(-1).transpose(-1, -2)).transpose(-1, -2).unsqueeze(-1)
# Multi-scale information fusion
y = self.sigmoid(y)
return x * y.expand_as(x)
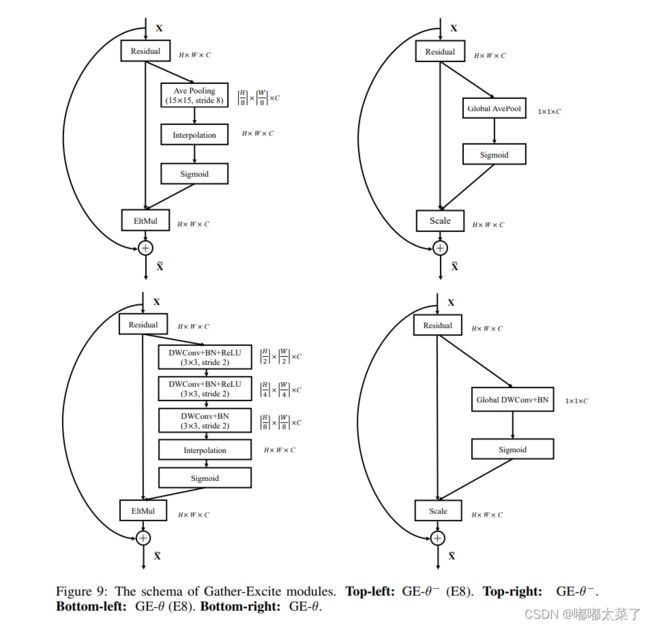
三、GE(Gather-Excite)
GE是空间注意力机制,论文:论文地址
该机制较为简单,有四种方式,总体流程如下(看图理解比较好,不多说了):
可以通过timm轻松调用该模块,timm实现的源码:
import math
from torch import nn as nn
import torch.nn.functional as F
from .create_act import create_act_layer, get_act_layer
from .create_conv2d import create_conv2d
from .helpers import make_divisible
from .mlp import ConvMlp
class GatherExcite(nn.Module):
""" Gather-Excite Attention Module
"""
def __init__(
self, channels, feat_size=None, extra_params=False, extent=0, use_mlp=True,
rd_ratio=1./16, rd_channels=None, rd_divisor=1, add_maxpool=False,
act_layer=nn.ReLU, norm_layer=nn.BatchNorm2d, gate_layer='sigmoid'):
super(GatherExcite, self).__init__()
self.add_maxpool = add_maxpool
act_layer = get_act_layer(act_layer)
self.extent = extent
if extra_params:
self.gather = nn.Sequential()
if extent == 0:
assert feat_size is not None, 'spatial feature size must be specified for global extent w/ params'
self.gather.add_module(
'conv1', create_conv2d(channels, channels, kernel_size=feat_size, stride=1, depthwise=True))
if norm_layer:
self.gather.add_module(f'norm1', nn.BatchNorm2d(channels))
else:
assert extent % 2 == 0
num_conv = int(math.log2(extent))
for i in range(num_conv):
self.gather.add_module(
f'conv{i + 1}',
create_conv2d(channels, channels, kernel_size=3, stride=2, depthwise=True))
if norm_layer:
self.gather.add_module(f'norm{i + 1}', nn.BatchNorm2d(channels))
if i != num_conv - 1:
self.gather.add_module(f'act{i + 1}', act_layer(inplace=True))
else:
self.gather = None
if self.extent == 0:
self.gk = 0
self.gs = 0
else:
assert extent % 2 == 0
self.gk = self.extent * 2 - 1
self.gs = self.extent
if not rd_channels:
rd_channels = make_divisible(channels * rd_ratio, rd_divisor, round_limit=0.)
self.mlp = ConvMlp(channels, rd_channels, act_layer=act_layer) if use_mlp else nn.Identity()
self.gate = create_act_layer(gate_layer)
def forward(self, x):
size = x.shape[-2:]
if self.gather is not None:
x_ge = self.gather(x)
else:
if self.extent == 0:
# global extent
x_ge = x.mean(dim=(2, 3), keepdims=True)
if self.add_maxpool:
# experimental codepath, may remove or change
x_ge = 0.5 * x_ge + 0.5 * x.amax((2, 3), keepdim=True)
else:
x_ge = F.avg_pool2d(
x, kernel_size=self.gk, stride=self.gs, padding=self.gk // 2, count_include_pad=False)
if self.add_maxpool:
# experimental codepath, may remove or change
x_ge = 0.5 * x_ge + 0.5 * F.max_pool2d(x, kernel_size=self.gk, stride=self.gs, padding=self.gk // 2)
x_ge = self.mlp(x_ge)
if x_ge.shape[-1] != 1 or x_ge.shape[-2] != 1:
x_ge = F.interpolate(x_ge, size=size)
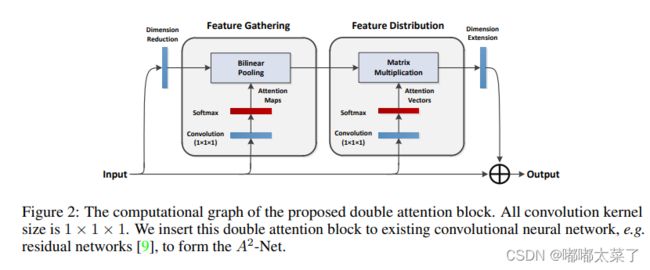
return x * self.gate(x_ge)四、A2-Net(Double Attention Networks)
双重注意力网络(A2-Nets)方法引入了新的关系函数用于非局部(NL)块,依次使用两个连续的注意力块。论文地址:论文地址
其计算过程类似于SelfAttention模块,可以看diamagnetic对照理解。
如下图:
代码如下:
import torch
import torch.nn as nn
import torch.nn.functional as F
class DoubleAtten(nn.Module):
"""
A2-Nets: Double Attention Networks. NIPS 2018
"""
def __init__(self,in_c):
"""
:param
in_c: 进行注意力refine的特征图的通道数目;
原文中的降维和升维没有使用
"""
super(DoubleAtten,self).__init__()
self.in_c = in_c
"""
以下对同一输入特征图进行卷积,产生三个尺度相同的特征图,即为文中提到A, B, V
"""
self.convA = nn.Conv2d(in_c,in_c,kernel_size=1)
self.convB = nn.Conv2d(in_c,in_c,kernel_size=1)
self.convV = nn.Conv2d(in_c,in_c,kernel_size=1)
def forward(self,input):
feature_maps = self.convA(input)
atten_map = self.convB(input)
b, _, h, w = feature_maps.shape
feature_maps = feature_maps.view(b, 1, self.in_c, h*w) # 对 A 进行reshape
atten_map = atten_map.view(b, self.in_c, 1, h*w) # 对 B 进行reshape 生成 attention_aps
global_descriptors = torch.mean((feature_maps * F.softmax(atten_map, dim=-1)),dim=-1) # 特征图与attention_maps 相乘生成全局特征描述子
v = self.convV(input)
atten_vectors = F.softmax(v.view(b, self.in_c, h*w), dim=-1) # 生成 attention_vectors
out = torch.bmm(atten_vectors.permute(0,2,1), global_descriptors).permute(0,2,1) # 注意力向量左乘全局特征描述子
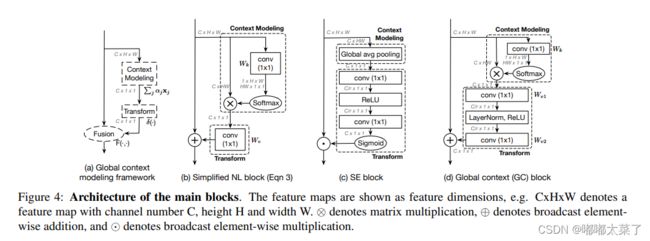
return out.view(b, _, h, w)五、GCNet(Global Context)
全局上下文网络(GC-Net)方法使用复杂的基于置换的操作将NL-块和SE块集成,以捕捉长期依赖关系。论文:论文地址
可以看出GC模块是对SE的改进,如下图:
该实现的初始化依赖于mmcv,代码如下:
import torch
from mmcv.cnn import constant_init, kaiming_init
from torch import nn
def last_zero_init(m):
if isinstance(m, nn.Sequential):
constant_init(m[-1], val=0)
else:
constant_init(m, val=0)
class ContextBlock(nn.Module):
def __init__(self,
inplanes,
ratio,
pooling_type='att',
fusion_types=('channel_add', )):
super(ContextBlock, self).__init__()
assert pooling_type in ['avg', 'att']
assert isinstance(fusion_types, (list, tuple))
valid_fusion_types = ['channel_add', 'channel_mul']
assert all([f in valid_fusion_types for f in fusion_types])
assert len(fusion_types) > 0, 'at least one fusion should be used'
self.inplanes = inplanes
self.ratio = ratio
self.planes = int(inplanes * ratio)
self.pooling_type = pooling_type
self.fusion_types = fusion_types
if pooling_type == 'att':
self.conv_mask = nn.Conv2d(inplanes, 1, kernel_size=1)
self.softmax = nn.Softmax(dim=2)
else:
self.avg_pool = nn.AdaptiveAvgPool2d(1)
if 'channel_add' in fusion_types:
self.channel_add_conv = nn.Sequential(
nn.Conv2d(self.inplanes, self.planes, kernel_size=1),
nn.LayerNorm([self.planes, 1, 1]),
nn.ReLU(inplace=True), # yapf: disable
nn.Conv2d(self.planes, self.inplanes, kernel_size=1))
else:
self.channel_add_conv = None
if 'channel_mul' in fusion_types:
self.channel_mul_conv = nn.Sequential(
nn.Conv2d(self.inplanes, self.planes, kernel_size=1),
nn.LayerNorm([self.planes, 1, 1]),
nn.ReLU(inplace=True), # yapf: disable
nn.Conv2d(self.planes, self.inplanes, kernel_size=1))
else:
self.channel_mul_conv = None
self.reset_parameters()
def reset_parameters(self):
if self.pooling_type == 'att':
kaiming_init(self.conv_mask, mode='fan_in')
self.conv_mask.inited = True
if self.channel_add_conv is not None:
last_zero_init(self.channel_add_conv)
if self.channel_mul_conv is not None:
last_zero_init(self.channel_mul_conv)
def spatial_pool(self, x):
batch, channel, height, width = x.size()
if self.pooling_type == 'att':
input_x = x
# [N, C, H * W]
input_x = input_x.view(batch, channel, height * width)
# [N, 1, C, H * W]
input_x = input_x.unsqueeze(1)
# [N, 1, H, W]
context_mask = self.conv_mask(x)
# [N, 1, H * W]
context_mask = context_mask.view(batch, 1, height * width)
# [N, 1, H * W]
context_mask = self.softmax(context_mask)
# [N, 1, H * W, 1]
context_mask = context_mask.unsqueeze(-1)
# [N, 1, C, 1]
context = torch.matmul(input_x, context_mask)
# [N, C, 1, 1]
context = context.view(batch, channel, 1, 1)
else:
# [N, C, 1, 1]
context = self.avg_pool(x)
return context
def forward(self, x):
# [N, C, 1, 1]
context = self.spatial_pool(x)
out = x
if self.channel_mul_conv is not None:
# [N, C, 1, 1]
channel_mul_term = torch.sigmoid(self.channel_mul_conv(context))
out = out * channel_mul_term
if self.channel_add_conv is not None:
# [N, C, 1, 1]
channel_add_term = self.channel_add_conv(context)
out = out + channel_add_term
return out六、CBAM(Convolutional Block Attention Module)
CBAM是通道-空间注意力机制,论文:论文地址
很简单的通道注意力和空间注意力融合。
如下图:

代码如下:
import numpy as np
import torch
from torch import nn
from torch.nn import init
class ChannelAttention(nn.Module):
def __init__(self,channel,reduction=16):
super().__init__()
self.maxpool=nn.AdaptiveMaxPool2d(1)
self.avgpool=nn.AdaptiveAvgPool2d(1)
self.se=nn.Sequential(
nn.Conv2d(channel,channel//reduction,1,bias=False),
nn.ReLU(),
nn.Conv2d(channel//reduction,channel,1,bias=False)
)
self.sigmoid=nn.Sigmoid()
def forward(self, x) :
max_result=self.maxpool(x)
avg_result=self.avgpool(x)
max_out=self.se(max_result)
avg_out=self.se(avg_result)
output=self.sigmoid(max_out+avg_out)
return output
class SpatialAttention(nn.Module):
def __init__(self,kernel_size=7):
super().__init__()
self.conv=nn.Conv2d(2,1,kernel_size=kernel_size,padding=kernel_size//2)
self.sigmoid=nn.Sigmoid()
def forward(self, x) :
max_result,_=torch.max(x,dim=1,keepdim=True)
avg_result=torch.mean(x,dim=1,keepdim=True)
result=torch.cat([max_result,avg_result],1)
output=self.conv(result)
output=self.sigmoid(output)
return output
class CBAMBlock(nn.Module):
def __init__(self, channel=512,reduction=16,kernel_size=49):
super().__init__()
self.ca=ChannelAttention(channel=channel,reduction=reduction)
self.sa=SpatialAttention(kernel_size=kernel_size)
def init_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
init.kaiming_normal_(m.weight, mode='fan_out')
if m.bias is not None:
init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
init.constant_(m.weight, 1)
init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
init.normal_(m.weight, std=0.001)
if m.bias is not None:
init.constant_(m.bias, 0)
def forward(self, x):
b, c, _, _ = x.size()
residual=x
out=x*self.ca(x)
out=out*self.sa(out)
return out+residual