Raspberry PI + Codesys + EtherCAT步进驱动ECR60 Motion功能测试
运动控制功能是codesys及EtherCAT通讯的重要功能,接下来对测试EtherCAT的运动控制部分,由于对这一部分功能不熟悉,所以测试程序采用ST语言,采用 case语句,方便测试各个函数的运行功能和状态。
工具准备:
- 树莓派4B,已经按照前述方法设置好。
- ECR60 步进驱动器一个
- 57A2步进电机一个
- CAT6网线一条
- 电源:DC24V
Step1 树莓派准备
树莓派通电,有显示器的化,可以看到wifi是否连接成功,记录下此时的ip地址,由于后续Codesys连接。
Step2 电机及驱动器接线
- 将24V电源连接至驱动器的V+、V-端子
- 将步进电机的A+、A-、B+、B-连接至驱动器电机接线端子,锐特的57A2电机绕组颜色定义为:红、蓝、绿、黑
- 网线连接:CAT6网线一端连接树莓派的网口,另外一端连接ECR60的ECAT IN端口。
- 完成上述步骤后,可以开通24V电源

此时可见ECR60的PWR的绿色指示灯亮起,表示驱动器供电正常;ECAT IN网口的黄色LED灯亮起,表示网线连接正常。
Step3 Codesys项目设置
打开Codesys开发环境,新建一个标准项目,并选择目标板为“Codesys Control for Raspberry PI MC SL”
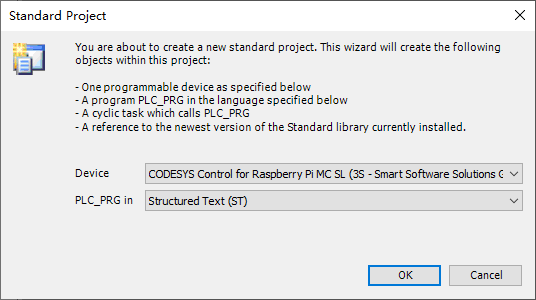 选择 MCSL
选择 MCSL
扫描并选择树莓
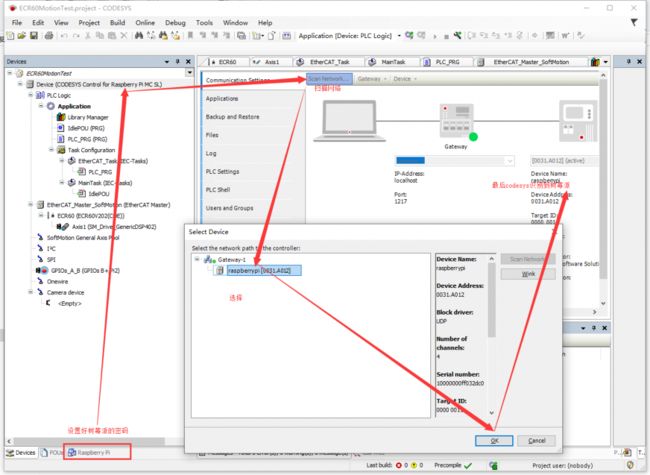 扫描树莓派
扫描树莓派
添加EhterCAT master主站
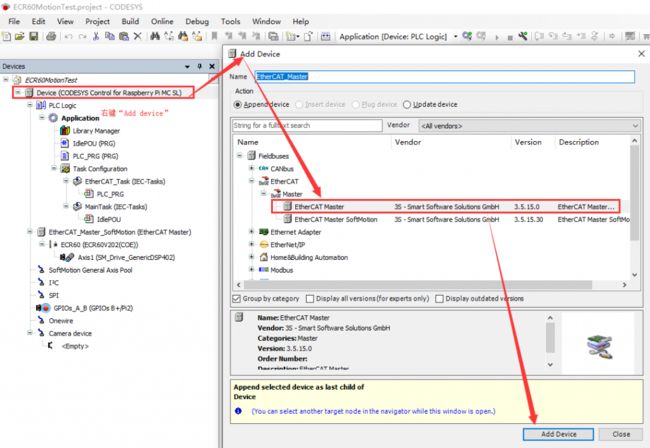 添加EtherCAT Master
添加EtherCAT Master
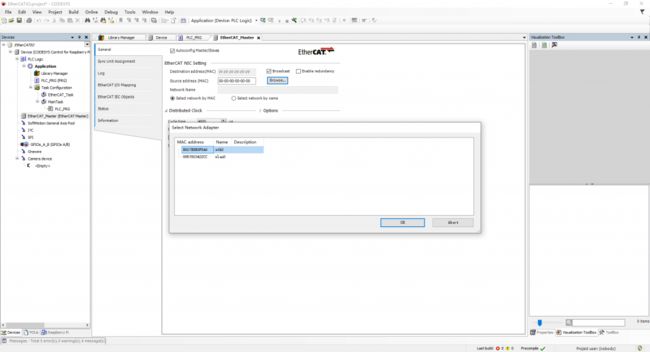
设定EtherCAT master 的网口属性,如下图,选择“eth0”
接下来添加ECR60步进驱动器,我手上的是最新的V202版本,直接添加即可。
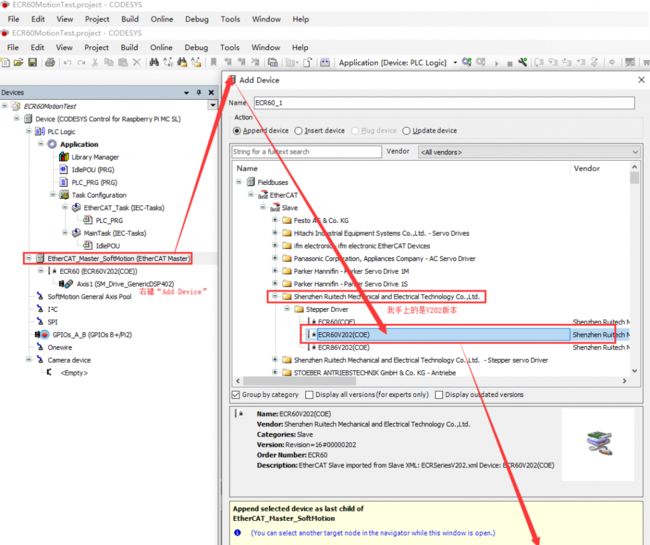 添加ECR60
添加ECR60
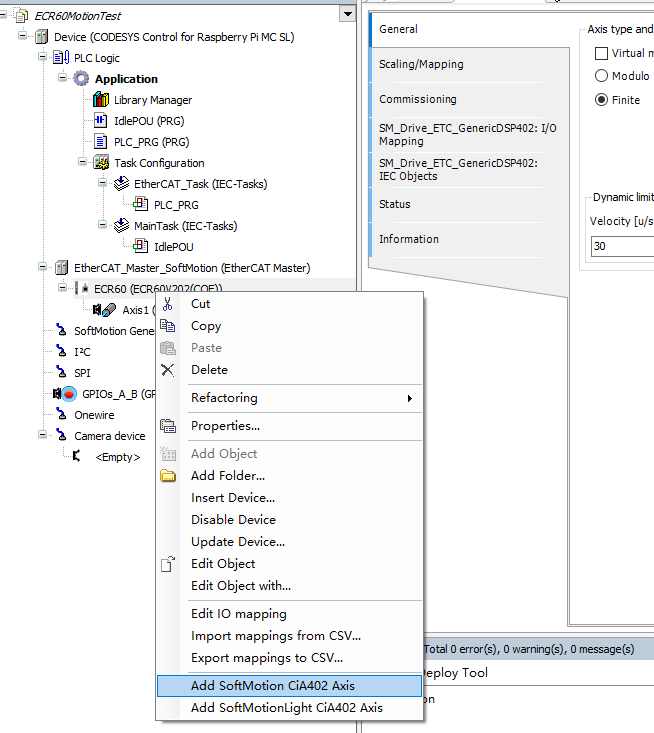
接下来添加一个运动控制轴,关联到ECR60驱动器,如下图:
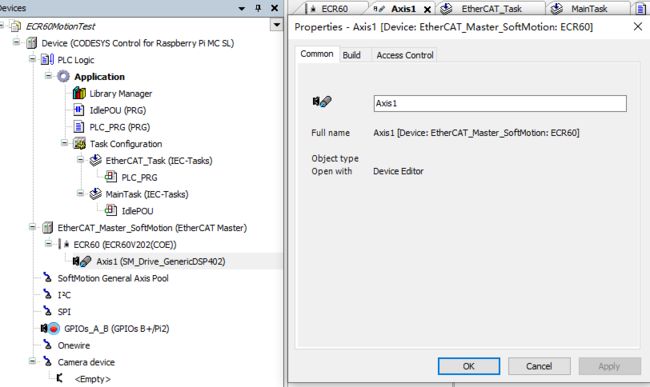
右键“Properties”,将轴的名字改为Axis1,如下图:
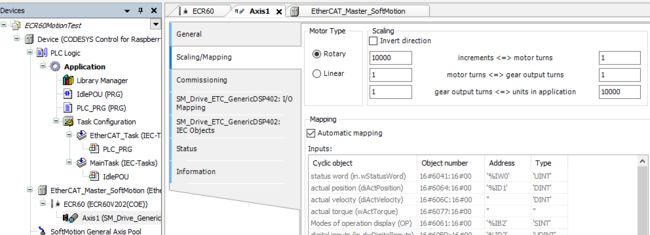
接下来设定轴的参数。首先设定电机运行的当量,ECR60默认使用10000脉冲/转,对应轴的设置如下图:
Step4 程序编写
至此,整个系统的设置已经完成,接下来编写程序实现步进电机的控制。默认在新建项目时,设定了一个程序“PLC_PRG”的编写方式为ST语言。首先设定运动相关的变量:
PROGRAM PLC_PRG
VAR
mcp: MC_Power; //使能函数
mcmv: MC_Jog; //点动函数
mcmabs: MC_MoveAbsolute; // 绝对值定位运动
mcminc: MC_MoveRelative; // 增量式运动
MVStop: MC_Stop; // 电机停止
Axis1Home: MC_Home; // 电机回零
Axis1Reset: MC_Reset; // 电机故障复位
Motionstate: INT; // 测试用,控制测试功能
Cnt:INT; // 仅仅用于测试
Jog_Pos: BOOL ; // 点动正 使能
Jog_Neg: BOOL; // 点动负 使能
MovEnable: BOOL; // 定位运行、回零及停止时的函数模块使能
MovIncDistance: LREAL; // 增量运动距离设定
MV_Speed: LREAL; // 运行速度设定
MV_Acc: LREAL; // 运行加速度设定
MV_Dec: LREAL; // 运行减速度设定
MV_Jerk: LREAL; // 运行加加速度设定
MovAbsDistance: LREAL; // 绝对定位时的目标位置
END_VAR设计一个程序,通过状态跳转,实现对各个函数的测试,相关程序如下:
CASE Motionstate OF
0:
Cnt := Cnt+1;
MV_Speed:= 10000;
MV_Acc:= 1000000;
MV_Dec:= 1000000;
MV_Jerk:= 100000000;
Jog_Pos:= TRUE;
1: //Enable motor,Power on
mcp(
Axis:= Axis1 ,
Enable:= TRUE ,
bRegulatorOn:= TRUE,
bDriveStart:= TRUE,
Status=> ,
Busy=> ,
Error=> ,
ErrorID=> );
2:// Disable motor,Power off
mcp(
Axis:=Axis1 ,
Enable:= TRUE ,
bRegulatorOn:= FALSE,
bDriveStart:= TRUE,
Status=> ,
Busy=> ,
Error=> ,
ErrorID=> );
3: // JOG+ and JOG-
mcmv(
Axis:=Axis1 ,
JogForward:=Jog_Pos ,
JogBackward:=Jog_Neg ,
Velocity:= MV_Speed,
Acceleration:= MV_Acc,
Deceleration:= MV_Dec,
Jerk:= MV_Jerk,
Busy=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
4: // Move relative POS and Neg
mcminc(
Axis:=Axis1 ,
Execute:= MovEnable,
Distance:= MovIncDistance,
Velocity:= MV_Speed,
Acceleration:= MV_Acc,
Deceleration:= MV_Dec,
Jerk:= MV_Jerk,
Done=> ,
Busy=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
5: // Move Abs
mcmabs(
Axis:=Axis1 ,
Execute:= MovEnable,
Position:= MovAbsDistance,
Velocity:= MV_Speed,
Acceleration:= MV_Acc,
Deceleration:= MV_Dec,
Jerk:= MV_Jerk,
Done=> ,
Busy=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
6: // Stop motor
MVStop(
Axis:=Axis1 ,
Execute:= MovEnable,
Jerk:= MV_Jerk,
Done=> ,
Busy=> ,
Error=> ,
ErrorID=> );
7: // Home
Axis1Home(
Axis:=Axis1 ,
Execute:= MovEnable,
Done=> ,
Busy=> ,
CommandAborted=> ,
Error=> ,
ErrorID=> );
8:
Axis1Reset(
Axis:=Axis1 ,
Execute:= TRUE,
);
END_CASE;
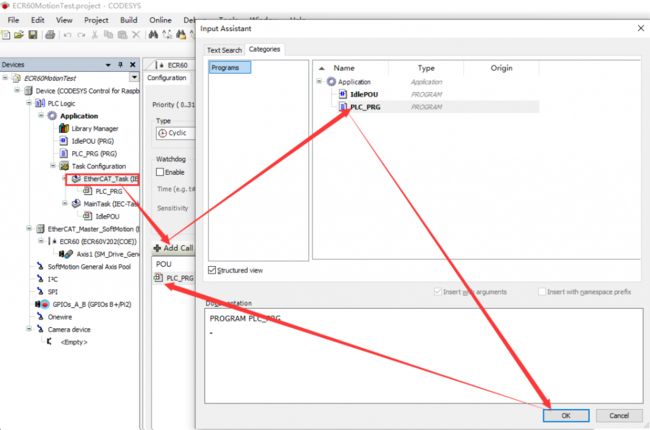
将“PLC_PRG”添加到EtherCAT_Task任务中
至此,程序编写完成,任务设置完成,可以进行下载程序测试。
Step5 运行及测试
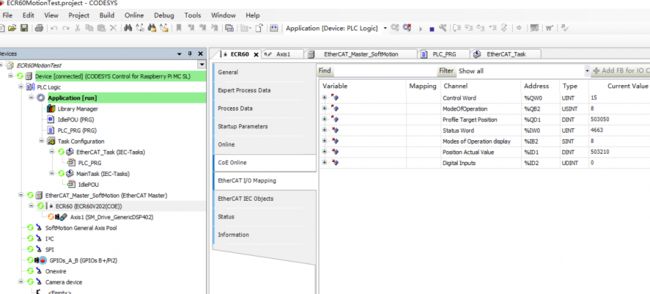
在Codesys环境中,“Online” —> “Login”,下载程序进入到树莓派,然后点击“Debug” —> “Start”。如果之前都是顺利的化,此时步进驱动器的EtherCAT的RUN绿色指示灯常亮,ECAT IN的绿色数据灯一直闪烁,轴Axis1的图标为橙色双箭头,说明轴已经准备就绪,橙色是因为树莓派没有正式的授权运行codesys,处于demo状态。codesys的项目界面如下图:

测试程序状态变量“MotionState”为0,Cnt一直增加,程序初始化设置运行的速度、加速度等变量。。需要注意的是ECR60默认电流为3000mA,如果你的电机额定电流远小于该值,需要首先修改电流值。57A2额定电流为4000mA,所以可以直接测试。此时步进电机不锁轴,接下来我们首先使能电机,将“MotionState”值改为1,

接下来我们进行点动测试,按照上述方法,将“MotionState”设置为3,“Ctrl + F7”写入值,此时电机将以1转/秒的速度逆时针运转。接下来将Jog_Pos设置为FALSE,Jog_Neg设置为TRUE,“Ctrl + F7”写入值,此时电机立刻改为顺时针运行。
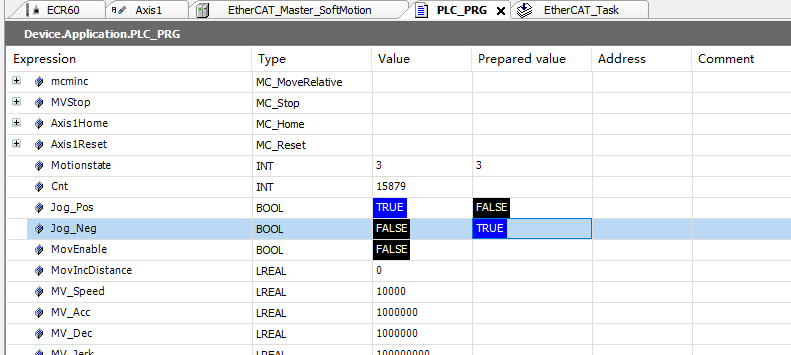
将Jog_Pos和Jog_Neg一起都设置为FALSE,此时电机停止运行。接下来我们测试相对运动。设置“MovIncDistance”变量为10000,我们每次让电机运行1转的距离,并将“MotionState”设置为4,“Ctrl + F7”写入值,此时电机并没有运行。需要将“MovEnable”设置为“TRUE”,并写入时,电机将运行以1转/秒的速度逆时针运行1转,然后停止。

如果要再次运行该模块,则需要先将“MovEnable”设置为FALSE,然后再设置为“TRUE”,电机才会继续运行1转。那么如果要让电机反转1转,则只需要将“MovIncDistance”设置为“-10000”,重复上述动作即可。
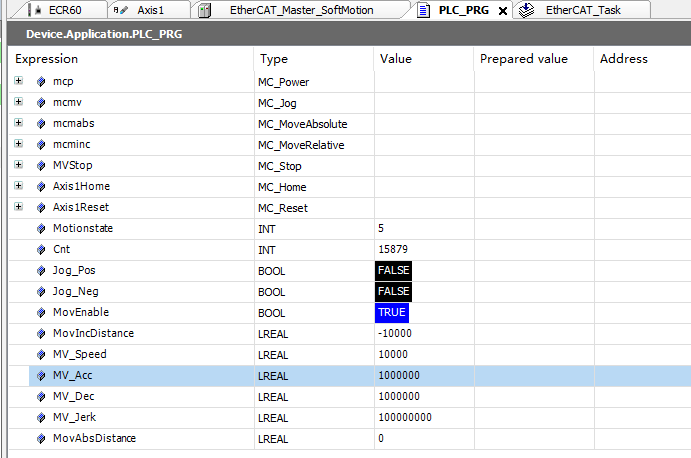
经过刚刚的各种测试,此时电机的位置已经到了一个随机的位置,如下图查看:
接下来我们进行绝对值定位,让电机回到“0”的位置。将“MotionState”设置为5,“MovEnable”设置为“TRUE”,写入,此时电机朝着0的位置运行,经过一段时间后,电机回到0位置并停止。
至此,电机已经能够完成各种动作,接着测试电机的回零功能。将“MotionState”设置为7,“MovEnable”设置为“TRUE”,写入即可触发电机回零。默认ECR60采用CIA40的回零模式17。电机此时以默认的回零速度寻找负限位,将COM+连接24V正极,IN4端子连接24V负极,此时电机停止然后反向低速反转,此时去除IN4的连接,则电机回零完成。本次测试的项目如下: