ubuntu16.04安装并使用evo测评工具
目录
安装pip
下载并安装evo:
evo的使用:
APE(Absolute pose error,单位为米)和RPE(relative pose error,单位为百分比)表格生成:
生成RMSE(The root mean squared error,均方根误差)结果对比表格以及柱状图表:
-
安装pip
sudo apt-get install python-pip更新软件包:
sudo apt-get update更新pip:
-
下载并安装evo:
下载evo源码:
git clone https://github.com/MichaelGrupp/evo.gitcd到evo目录下:
pip install --user evo --upgrade --no-binary evo
pip install evo --upgrade检查pip是否安装成功: pip -v
如果提示pip版本低,那么就通过下面的指令升级pip:
python -m pip install --upgrade pip
-
evo的使用:
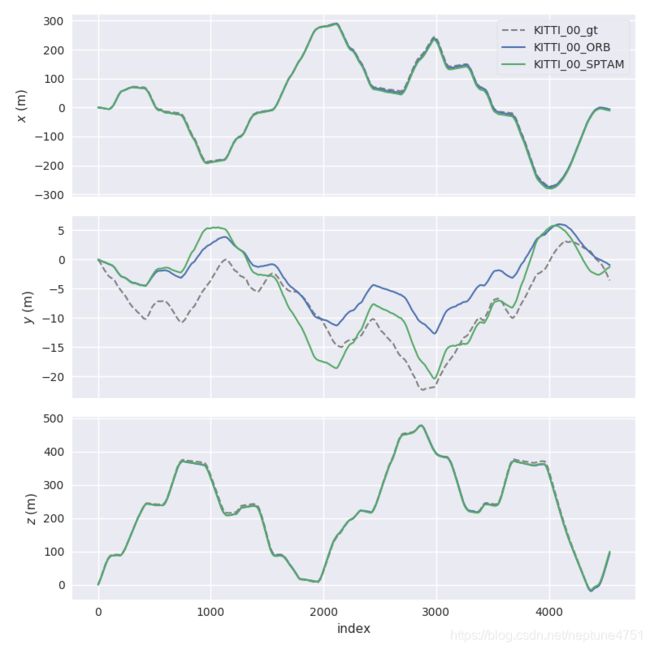
使用evo_traj 指令plot多轨迹指令:如使用evo_traj,plot 两个 KITTI pose files 和 ground truth;生成轨迹图的对比图:
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz
-

-
APE(Absolute pose error,单位为米)和RPE(relative pose error,单位为百分比)表格生成:
-
APE绝对位姿误差,比较估计轨迹和参考轨迹并计算整个轨迹的统计数据,适用于测试轨迹的全局一致性。使用evo_ape估计来自ORB-SLAM和S-PTAM的两条轨迹的绝对位姿误差.
KITTI_00_gt.txt作为ground truth,计算考虑平移和旋转部分误差的ape,进行平移和旋转对齐,以详细模式显示,保存至.zip文件,画图并保存。
mkdir results
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -r full
-va --plot --plot_mode xz --save_results results/ORB.zip命令格式:evo_ape 格式 参考轨迹 估计轨迹[可选项].
- RPE相对位姿误差,不进行绝对位姿的比较,只比较运动(姿态增量)。相对位姿误差可以给出局部精度,例如slam系统每米的平移或者旋转漂移量。以下指令含义:求每米考虑旋转角的rpe,以详细模式显示并画图。
evo_rpe euroc data.csv V102.txt -r angle_deg --delta 1 --delta_unit m
-va --plot --plot_mode xyz --save_plot ./VIO --save_results ./VIO.zip命令语法:evo_rpe 格式 参考轨迹 估计轨迹 [可选项]
-
生成RMSE(The root mean squared error,均方根误差)结果对比表格以及柱状图表:
evo_res可以用来对比多个结果文件并产生表格:evo_ape/evo_rpe中将结果保存为.zip文件后,可以利用evo_res对不同的结果进行比较。
evo_res results/*.zip -p --save_table results/table.csv
参考:
https://blog.csdn.net/weixin_38636815/article/details/107811119
https://blog.csdn.net/Darlingqiang/article/details/102631102
https://github.com/MichaelGrupp/evo