5.从点亮led看位带操作
前言:
学过51的应该都清楚,51的IO口输出是非常方便的,可以直接对某个IO幅值0或者1,例如P1.1=1,或者P1.1=0;而stm32呢,操作GPIO的步骤就相对多一些~
初始化方面:
1.GPIO对应的组的时钟开启
2.每个GPIO组都各有GPIOx_MODER(设置IO模式,输入/输出/复用等),GPIOx_OTYPER(设置IO状态,推挽/开漏),GPIOx_OSPEEDR(设置IO速度),GPIOx_PUPDR(设置电气属性,上下拉),GPIOx_IDR/GPIOx_ODR(读/写IO)这么多寄存器,每个GPIO组一般都有16个IO口,例如GPIOA,就有PA_0,PA_1 ...PA_15,所以以上的寄存器大多是每两个位控制一个IO口,不过也有像读写IO寄存器,它们是每一个位对应一个IO口。我们使用某一个IO口,需要初始化对应的寄存器对应的位,可以说比较麻烦。
3.读取GPIOx_IDR可以读取GPIO电平, 向GPIOx_ODR写可以让GPIO输出想要的电平,上面的配置也就罢了,配置一次麻烦点就麻烦点,但是输出0和1就没有像51一样位带操作(直接对某一个位进行操作)那么方便了。
stm32怎么实现位带操作呢?
例如:
LED0=0; //DS0亮
LED1=1; //DS1灭ARM Cortex-M4这个其实已经安排好了,有一些地址的每一个位都可以映射到另一个地址上去(注意,是每一个位都有了一个地址可以直接操作),从效果上来讲,我们对新地址幅值0和1,就相当于对原来的位,幅值0和1.
按照这个思路,如果我们把GPIOx_IDR/GPIOx_ODR映射过去,实现位带操作,那不就可以直接对里面的每个位(即这个GPIO组的每一个IO口)进行操作了么,尤其是对于GPIOx_ODR来说,可以直接让它输出高电平或者低电平。
位带操作实现方法:
首先我们要明白,原来的位和新的地址的关系,原来的1bit映射到新地址后占据4B的地址,例如
0x40020014.0这个位对应---->>0x42400280~0x42400283 这四个地址
0x40020014.1这个位对应---->>0x42400284~0x42400287 这四个地址
.......
知道了这个我们只需要知道,哪片地址空间是原地址,哪片地址空间是位带别名区,查看《STM32F3与F4系列Cortex M4内核编程手册.pdf》31页我们可以得知,M4有两个可以映射的区域,即下面两个映射区
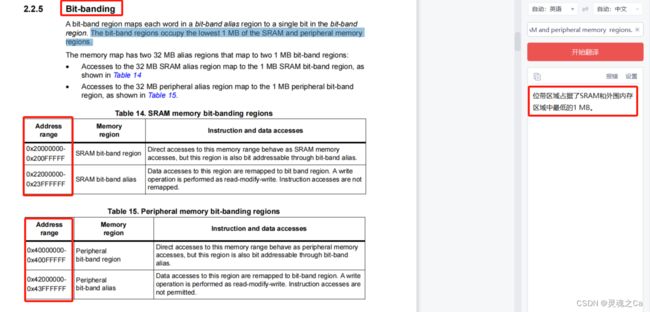
通过《STM32F4xx中文参考手册.pdf》我们可以知道,GPIO确实在其中的一个可映射的地址范围之内(当然这里也可以看出要GPIO的时钟,是依附于AHB1的)

需要注意的是,GPIO位带操作我们用到它的GPIOx_IDR/GPIOx_ODR这两个寄存器是读取和写IO数据的,并不能改变其输入输出模式,所以如果是类似模拟I2C,里面的数据线可能是作输出,可能是设输入,对数据线这个IO幅值、读值操作之前,要先设置其输入输出模式。
下面来看代码:
先是和GPIO初始化有关的:
1.GPIO对应的组的时钟开启
这个开发板两个LED灯的管脚分别是:DS0 接 PF9,DS1 接 PF10,所以先使能GPIOF的时钟
RCC->AHB1ENR|=1<<5;//使能PORTF时钟 2.配置GPIO输入/输出,上拉/下拉,速度等
正点原子给了一个函数:直接用就行
//GPIO通用设置
//GPIOx:GPIOA~GPIOI.
//BITx:0X0000~0XFFFF,位设置,每个位代表一个IO,第0位代表Px0,第1位代表Px1,依次类推.比如0X0101,代表同时设置Px0和Px8.
//MODE:0~3;模式选择,0,输入(系统复位默认状态);1,普通输出;2,复用功能;3,模拟输入.
//OTYPE:0/1;输出类型选择,0,推挽输出;1,开漏输出.
//OSPEED:0~3;输出速度设置,0,2Mhz;1,25Mhz;2,50Mhz;3,100Mh.
//PUPD:0~3:上下拉设置,0,不带上下拉;1,上拉;2,下拉;3,保留.
//注意:在输入模式(普通输入/模拟输入)下,OTYPE和OSPEED参数无效!!
void GPIO_Set(GPIO_TypeDef* GPIOx,u32 BITx,u32 MODE,u32 OTYPE,u32 OSPEED,u32 PUPD)
{
u32 pinpos=0,pos=0,curpin=0;
for(pinpos=0;pinpos<16;pinpos++)
{
pos=1<MODER&=~(3<<(pinpos*2)); //先清除原来的设置
GPIOx->MODER|=MODE<<(pinpos*2); //设置新的模式
if((MODE==0X01)||(MODE==0X02)) //如果是输出模式/复用功能模式
{
GPIOx->OSPEEDR&=~(3<<(pinpos*2)); //清除原来的设置
GPIOx->OSPEEDR|=(OSPEED<<(pinpos*2));//设置新的速度值
GPIOx->OTYPER&=~(1<OTYPER|=OTYPE<PUPDR&=~(3<<(pinpos*2)); //先清除原来的设置
GPIOx->PUPDR|=PUPD<<(pinpos*2); //设置新的上下拉
}
}
} 调用如下:这种没什么技术含量的直接阔批
GPIO_Set(GPIOF,PIN9|PIN10,GPIO_MODE_OUT,GPIO_OTYPE_PP,GPIO_SPEED_100M,GPIO_PUPD_PU); //PF9,PF10设置
3.用位带操作来读写IO
//LED端口定义
#define LED0 PFout(9) // DS0
#define LED1 PFout(10) // DS1
LED0=1;//LED0关闭
LED1=1;//LED1关闭代码就是以上这样
下面来看位带操作在代码上是怎么搞的
从上面我们可知,对LED宏操作就是对PFout(9)和PFout(10)操作,再追溯看PFout(n)是什么东东:
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入里面由套了一个宏,继续追查!备注一下,
先不看BIT_ADDR,我们先看一下GPIOx_ODR_Addr和GPIOx_IDR_Addr是什么:它也是宏定义,只不过是各个GPIO组的ODR和IDR寄存器(输出0/1以及读取IO电平的寄存器)的地址罢了
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010 继续追查:参数1是数据寄存器地址,参数2则是第n个IO口
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入BIT_ADDR这个宏其实就是位带映射了,你输入一个地址以及第n个IO口,它就能转换成位带别名区的地址(也就是上面说的,原地址的某个位,映射到位带别名区的地址),然后我们对这个位带别名区的地址操作,比如写0或者写1,就相当于对原地址的对应位写0或写1
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum)) 带个值进去理解一下:
原来的一个bit膨胀为32个bit,即4个地址
((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
找一个带入进去,例如对 PA_1 输出数据寄存器ODR操作,即 GPIOA_ODR_Addr = 0x40020014
((0x40020014 & 0xF0000000)+0x2000000+((0x40020014 &0xFFFFF)<<5)+(1<<2))
(0x40020014 & 0xF0000000) = 0x40000000 ((0x40020014 &0xFFFFF)<<5) = 0x00020014*32
0x00020014*32即0x00020014*8*4
0x00020014*8是算出这些地址 共有多少个bit 再乘以4是算出该寄存器基地址在位带别名区的地址是多少
后面bitnum<<2即n*4,算出寄存器的第n位在位带别名区的地址是多少
所以这个语句的结果就是:0x40000000 + 0x02000000 + 0x00020014*32 + 1*4 = 0x42400284
这个地址就是GPIOA_ODR这个寄存器的第1位,映射到位带别名区的地址
这样当用户对位带别名区的地址操作,内部机制会转化为对相应寄存器的相应的位进行操作和手册上所说的地址映射范围以及规则是一样的:
以下来看一下模拟I2C的IO宏定义加深对位带操作的理解:
//IO方向设置
#define SDA_IN() {GPIOB->MODER&=~(3<<(9*2));GPIOB->MODER|=0<<9*2;} //PB9输入模式
#define SDA_OUT() {GPIOB->MODER&=~(3<<(9*2));GPIOB->MODER|=1<<9*2;} //PB9输出模式
//IO操作函数
#define IIC_SCL PBout(8) //SCL
#define IIC_SDA PBout(9) //SDA
#define READ_SDA PBin(9) //输入SDA 例如在I2C发送数据时,要设置SDA的方向之后,再操作数据线
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
} 位带操作就是这样啦~完