Liteos移植_STM32_HAL库
0 开发环境
- STM32CubeMX(HAL库)
- keil 5
- 正点原子探索者STM32F4ZET6
- LiteOS-develop分支
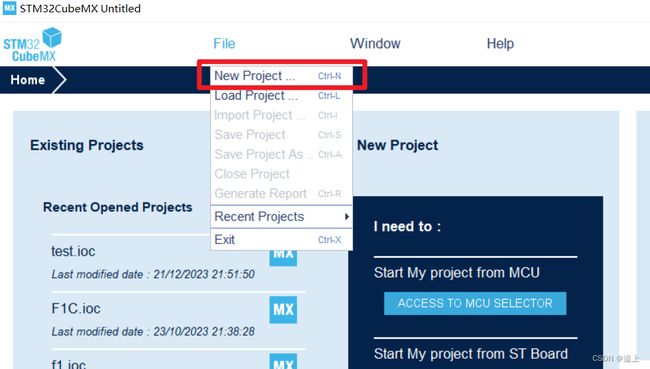
1 STM32CubeMX创建工程
如果有自己的工程,直接从
LiteOS源码获取开始关于STM32CubeMX的安装,看我另一篇博客STM32CubeMX安装
工程配置
- 创建新工程
- 选择芯片【STM32F407ZET6】(根据自己的板子选),然后双击该芯片,进入配置页面

- RCC配置,时钟信号均来自外部晶振

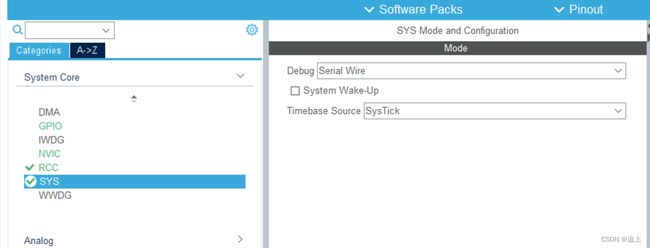
- SYS配置
- GPIO配置
GPIO这里配置PF9,因为我的开发板上这个引脚接的是LED灯
这里根据原理图,设置默认高电平,推挽输出,命名为LED0

- 系统时钟设置

生成工程
- 设置工程名,选择存放位置
![]()
- 选择工程文件夹格式,【Advanced/Basic】,这里选择了Advanced,不勾选后面的框

二者的区别

- 选择编译器,【MDK】,版本默认即可
![]() )
)
- 这个界面的其他内容默认即可
- 在Code Generator界面,设置内容如下图
 )
)
- 点击GENERATE CODE,生成工程

测试工程
在keil中打开,编译运行,无错误、无警告,表示创建成功

2 LiteOS源码获取
- 从官网Gitee仓库获取develop分支LiteOS: Huawei LiteOS开源代码官方仓库
- 但是官方这个版本里面文件好像有变动,没有移植成功,我就找了野火提供的LiteOS源码,使用这个成功移植
- 下载地址:LiteOS-STM32移植文件
- 这里提供的不是完全的仓库代码,只提供了移植所需要的文件
3 移植
在刚才创建的工程目录下创建LiteOS文件夹,将刚才下载的文件里面的四个文件夹拉到里面

arch文件夹
需要添加的文件都在arch\arm\arm-m路径下
- 使用keil,在Groups中添加
LiteOS/arch分组

- 添加具体文件如下所示

arch\arm\arm-m\src 目录下的全部文件
los_hw.c
los_hw_tick.c
los_hwi.c
arch\arm\arm-m\cortex-m4\keil 目录下的:(注:根据芯片内核选cortex-m文件夹)
los_dispatch_keil.S
在添加文件时,需要将文件类型选择为所以类型

kernel文件夹
- 在Groups中添加
LiteOS/kernel分组 - 添加具体文件如下所示【21个】
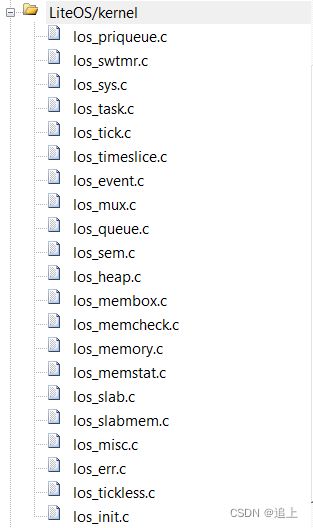
kernel\base\core 文件夹下全部.c文件
los_priqueue.c
los_swtmr.c
los_sys.c
los_task.c
los_tick.c
los_timeslice.c
kernel\base\ipc 文件夹下全部.c文件
los_event.c
los_mux.c
los_queue.c
los_sem.c
kernel\base\mem\bestfit_little 文件夹下全部.c文件
los_heap.c
los_memory.c
los_membox.c
los_memcheck.c
kernel\base\mem\common 文件夹下全部.c文件
los_memstat.c
los_slab.c
los_slabmem.c
kernel\base\misc 文件夹下全部.c文件
los_misc.c
kernel\base\om 文件夹下全部.c文件
los_err.c
kernel\extended\tickless 文件夹下全部.c文件
los_tickless.c
kernel 文件夹下的
los_init.c
OS_CONFIG文件夹
- 创建
LiteOS/config分组 - 只添加
target_config.h文件

cmsis
- 创建
LiteOS/cmsis分组 - 只添加
tcmsis_liteos.c文件


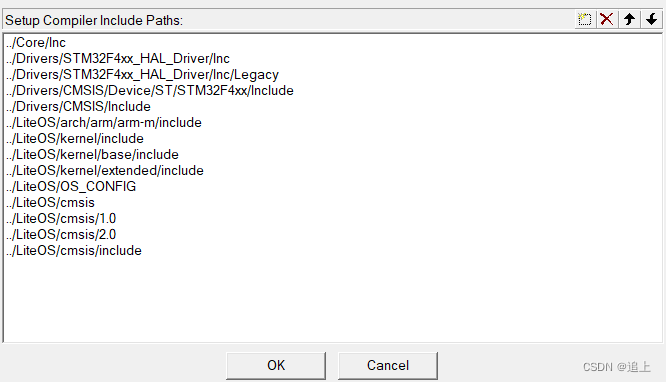
添加头文件路径

../LiteOS/arch/arm/arm-m/include
../LiteOS/kernel/include
../LiteOS/kernel/base/include
../LiteOS/kernel/extended/include
../LiteOS/OS_CONFIG
../LiteOS/cmsis
../LiteOS/cmsis/1.0
../LiteOS/cmsis/2.0
../LiteOS/cmsis/include
5 文件内容调整
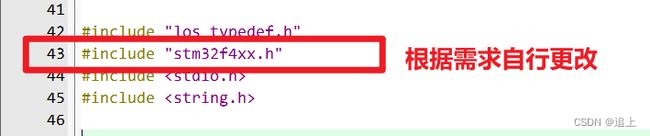
target_config
下面所以操作均在target_config.h中进行
- 芯片型号,这里要根据你的开发板型号进行更改
BOARD_SRAM_START_ADDR定义内存的起始地址,内存是 RAM(运行)内存,STM32 的 RAM起始地址是 0x20000000。如果不知道 RAM 的起始地址,可以在工程中查看
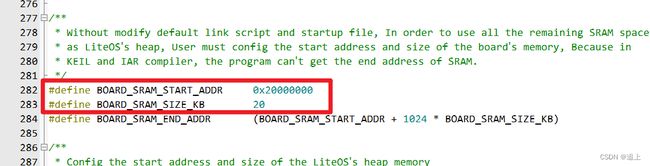
BOARD_SRAM_SIZE_KB定义芯片 RAM 的大小,根据对应的芯片进行修改,比如STM32F103ZET6 的 RAM 是 64KB,那么 BOARD_SRAM_SIZE_KB 可以定义为不超过64K,当然一般不能定义到那么大的,因为工程本身也是使用了一些内存的,系统可管理的内存大小就要小一点,根据需要进行调整即可。

stm32f4xx it.c
这个文件需要根据不同的板子来找,一般都是stm32f?xx it.c【?是芯片型号】
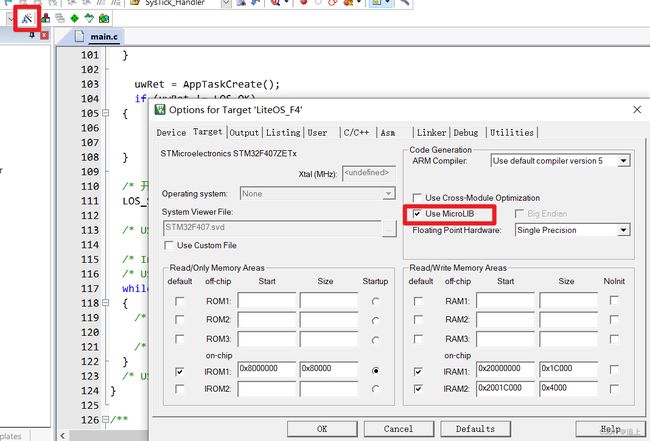
屏蔽掉PendSV_Handler和SysTick_Handler

在设置里面勾选Use MicroLIB
6 测试移植
- 编译运行,没有错误,但是有7个警告,这警告都是文件最后一行未换行,没有影响

- 编写代码进行测试,将下面的代码替换整个main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "los_sys.h"
#include "los_task.ph"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
static UINT32 AppTaskCreate(void);
static UINT32 Creat_Test1_Task(void);
static void Test1_Task(void);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
UINT32 Test1_Task_Handle; // 定义任务 ID 变量
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
UINT32 uwRet = LOS_OK; //定义一个任务创建的返回值,默认为创建成功
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
uwRet = LOS_KernelInit();
if (uwRet != LOS_OK)
{
printf("LiteOS 核心初始化失败!失败代码0x%X\n",uwRet);
return LOS_NOK;
}
uwRet = AppTaskCreate();
if (uwRet != LOS_OK)
{
printf("AppTaskCreate创建任务失败!失败代码0x%X\n",uwRet);
return LOS_NOK;
}
/* 开启LiteOS任务调度 */
LOS_Start();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/*******************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 任务创建,为了方便管理,所有的任务创建函数都可以放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
*************************************************************/
static UINT32 AppTaskCreate(void)
{
/* 定义一个返回类型变量,初始化为LOS_OK */
UINT32 uwRet = LOS_OK;
uwRet = Creat_Test1_Task();
if (uwRet != LOS_OK)
{
printf("Test1_Task任务创建失败!失败代码0x%X\n",uwRet);
return uwRet;
}
return LOS_OK;
}
// 创建任务
static UINT32 Creat_Test1_Task()
{
//定义一个创建任务的返回类型,初始化为创建成功的返回值
UINT32 uwRet = LOS_OK;
//定义一个用于创建任务的参数结构体
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio = 3; /* 任务优先级,数值越小,优先级越高 */
task_init_param.pcName = "Test1_Task";/* 任务名 */
task_init_param.pfnTaskEntry = (TSK_ENTRY_FUNC)Test1_Task;/* 任务函数入口 */
task_init_param.uwStackSize = 1024; /* 堆栈大小 */
uwRet = LOS_TaskCreate(&Test1_Task_Handle, &task_init_param);/* 创建任务 */
return uwRet;
}
// 创建任务具体实现
static void Test1_Task(void)
{
/* 任务都是一个无限循环,不能返回 */
while(1)
{
HAL_GPIO_WritePin(LED0_GPIO_Port, LED0_Pin, GPIO_PIN_SET);
LOS_TaskDelay(500);
HAL_GPIO_WritePin(LED0_GPIO_Port, LED0_Pin, GPIO_PIN_RESET);
LOS_TaskDelay(500);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
- 编译下载,等LED0闪烁
恭喜你移植LiteOS成功!
移植成功代码模板:STM32F4移植LiteOS模板文件