西电计科大数据计算机视觉作业一sobel算子和canny算子
基于python对Sobel和Canny算子的复现
Sobel算子部分
-
X方向梯度
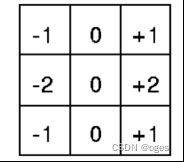
**图1.1Sobel x方向卷积核**
通过Sobel的x方向卷积核(如图1.1)与通过opencv读取到的灰度值图像矩阵进行乘法运算卷积运算得到新的图像。
通过循环实现卷积核与该图像的所有像素点都经过计算。
最后过滤掉一些像素值较小的噪音点,达到最终图像,代码如下所示:
kernel\_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
# sobel x方向卷积核
# x轴方向
def sobel\_x(img, threshold):
W = np.size(img, 0)
H = np.size(img, 1) # 计算图片的长度和宽度
mag = np.zeros(img.shape) # 创建一个图片形状的空矩阵
for i in range(0, W - 2):
for j in range(0, H - 2):
v = sum(sum(kernel\_x \* img[i:i + 3, j:j + 3])) # 进行矩阵卷积运算
mag[i + 1, j + 1] = v
for p in range(0, W): # 过滤掉一些噪音点,让主体突出
for q in range(0, H):
if mag[p, q] < threshold:
mag[p, q] = 0
return mag
-
Y方向梯度
Y方向梯度算法与x方向相似,只需将x方向梯度中的x卷积核替换成y方向的卷积核(如图2.1)再进行卷积运算即可。
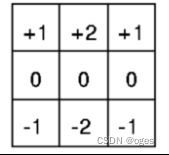
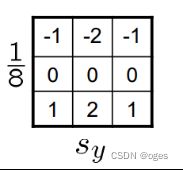
**图2.1Sobel y方向卷积核**
其代码如下:
kernel\_y = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]]) # sobel y方向卷积核
# y轴方向
def sobel\_y(img, threshold):
W = np.size(img, 0)
H = np.size(img, 1)
mag = np.zeros(img.shape)
for i in range(0, W - 2):
for j in range(0, H - 2):
h = sum(sum(kernel\_y \* img[i:i + 3, j:j + 3]))
mag[i + 1, j + 1] = h
for p in range(0, W):
for q in range(0, H):
if mag[p, q] < threshold:
mag[p, q] = 0
return mag
-
滤波结果
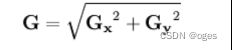
综合前两部的x方向梯度与y方向梯度,我们在算出一个像素点的x方向梯度与y方向梯度之后,通过平方和后取根号的形式,来获得该点的像素值。
kernel\_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]]) # sobel x方向卷积核
kernel\_y = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]]) # sobel y方向卷积核
def sobel1(img, threshold):
W = np.size(img, 0)
H = np.size(img, 1)
mag = np.zeros(img.shape)
for i in range(0, W - 2):
for j in range(0, H - 2):
v = sum(sum(kernel\_x \* img[i:i + 3, j:j + 3])) # x轴方向
h = sum(sum(kernel\_y \* img[i:i + 3, j:j + 3])) # y轴方向
z = np.sqrt((v \*\* 2) + (h \*\* 2))
if z < threshold: # 如果小于阈值 则为0
mag[i + 1, j + 1] = 0
else:
mag[i + 1, j + 1] = z
return mag
-
梯度幅值
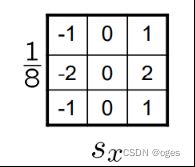
**图4.1计算幅值时Sobel x方向与y方向卷积核**
计算真实的幅值时我们需要用到计算幅值的卷积核(如图4.1)这与Sobel算子的标准定义不同。其计算方式与上一节提到的计算方式相似。
其代码如下:
kernel\_x = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]]) # sobel x方向卷积核
kernel\_y = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]]) # sobel y方向卷积核
a = 1 / 8 \* kernel\_x # 算幅值时的卷积核
b = 1 / 8 \* kernel\_y
def sobel\_amplitude(img, threshold):
W = np.size(img, 0)
H = np.size(img, 1)
mag = np.zeros(img.shape)
for i in range(0, W - 2):
for j in range(0, H - 2):
v = sum(sum(a \* img[i:i + 3, j:j + 3])) # x轴方向
h = sum(sum(b \* img[i:i + 3, j:j + 3])) # y轴方向
z = np.sqrt((v \*\* 2) + (h \*\* 2)) # 计算幅值
if z < threshold: # 如果幅值小于阈值 则为0
mag[i + 1, j + 1] = 0
else:
mag[i + 1, j + 1] = z
return mag
-
计算梯度角度
![]()
在我们分别计算出gy与gx后,通过求取他们的arctan值来计算出梯度角度。
Python math库中的atan2函数已经考虑到gx等于0的情况所以我们进行分类讨论。
atan2函数的返回值为(-Π,Π),我们通过映射和计算将他转化为(0,360)。
再将这些不同数值的像素通过色彩来进行区分,这里调用了matplotlib的cmap函数,中的rainbow色块如下图所示
![]()
** 图5.1rainbow色块展示 **
因cmap rainbow色块支持256个可选值 所以我们再将(0,360)的角度映射到
(0,256)上。如此角度越小的点颜色越偏蓝色,角度越大的点颜色偏红色
其代码如下:
def sobel\_amplitude(img, threshold):
W = np.size(img, 0)
H = np.size(img, 1)
mag = np.zeros(img.shape)
for i in range(0, W - 2):
for j in range(0, H - 2):
v = sum(sum(a \* img[i:i + 3, j:j + 3])) # x轴方向
h = sum(sum(b \* img[i:i + 3, j:j + 3])) # y轴方向
z = np.sqrt((v \*\* 2) + (h \*\* 2)) # 计算幅值
if z < threshold: # 如果幅值小于阈值 则为0
mag[i + 1, j + 1] = 0
else:
# 如果赋值大于阈值 则计算他的角度
# 这里用了math库的artan2的函数其返回值为(-Π,Π) 通过算数运算将其转化为(0,360)
# 因matplotlib的cmap库色彩可选值为256个 再经过运算转化为(0,256)
mag[i + 1, j + 1] = z
return mag
plt.imshow(mag\_angle, plt.get\_cmap('rainbow'))
-
Sobel结果展示
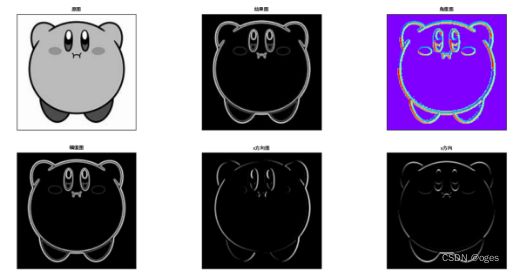
6.1Sobel算子各图结果展示
绘图代码如下:
def sobel(image):
# image = cv2.imread('2.jpg', 0) # read an image
mag\_y = sobel\_y(image, 5)
mag\_x = sobel\_x(image, 5)
mag\_amplitude = sobel\_amplitude(image, 5)
mag\_angle = sobel\_angle(image, 50)
mag\_sobel = sobel1(image, 5)
plt.figure("Sobel", frameon=False) # 图像窗口名称
plt.subplot(2, 3, 5)
plt.imshow(mag\_x, cmap='gray')
plt.title("x方向图", fontsize=8)
plt.xticks([])
plt.yticks([])
plt.subplot(2, 3, 6)
plt.imshow(mag\_y, cmap='gray')
plt.title("y方向", fontsize=8)
plt.xticks([])
plt.yticks([])
plt.subplot(2, 3, 3)
#plt.imshow(mag\_angle)
plt.imshow(mag\_angle, plt.get\_cmap('rainbow'))
plt.title("角度图", fontsize=8)
plt.xticks([])
plt.yticks([])
plt.subplot(2, 3, 4)
plt.imshow(mag\_amplitude, cmap='gray')
plt.title("幅值图", fontsize=8)
plt.xticks([])
plt.yticks([])
plt.subplot(2, 3, 2)
plt.imshow(mag\_sobel, cmap='gray')
plt.title("结果图", fontsize=8)
plt.xticks([])
plt.yticks([])
plt.subplot(2, 3, 1)
plt.imshow(image, cmap='gray')
plt.title("原图", fontsize=8)
plt.xticks([])
plt.yticks([])
-
Sobel算子结果分析
7.1. x方向梯度与y方向梯度对比发现x方向梯度图片在竖直方向和水平方向分别有所空缺

7.2 结果图与幅值图对比
虽然两张图片宏观上看十分相似没有什么区别,我一开始也以为自己是否做错。


但是当我放大两张图片时,发现在微观上,如果卷积核乘1/8后,其边缘将会相比于结果图更加清晰。我们将图片局部放大并将亮度调高后会很明显的看出,在乘1/8后图片跟接近于真实的幅值。
Canny算子部分
-
高斯滤波
高斯滤波器(kernel)是将高斯函数离散化,将滤波器中对应的横纵坐标索引代入高 斯函数,即可得到对应的值。
(2k+1)x(2k+1) 滤波器的计算公式如右:
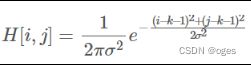
常见的高斯滤波器为size=5,其近似值为:

我们依旧用矩阵运算将待测图片进行高斯模糊。
其代码如下:
def smooth(img, sigma=1.4, length=5):
# 生成高斯核
k = length // 2
gaussian = np.zeros([length, length])
for i in range(length):
for j in range(length):
gaussian[i, j] = np.exp(-((i - k) \*\* 2 + (j - k) \*\* 2) / (2 \* sigma \*\* 2))
gaussian /= 2 \* np.pi \* sigma \*\* 2
gaussian = gaussian / np.sum(gaussian)
# 用高斯核进行滤波
W = np.size(img, 0)
H = np.size(img, 1)
new\_image = np.pad(img, ((1, 1), (1, 1)), constant\_values=0)
for i in range(W - 2 \* k):
for j in range(H - 2 \* k):
new\_image[i, j] = np.sum(img[i:i + 5, j:j + 5] \* gaussian)
return new\_image
-
计算图片的幅值与角度
其计算步骤与Sobel计算方式相同,此处不再赘述。
其代码如下:
def getGradAngle(image): # 用sobel核计算图片的幅值和梯度角度
*"""
-1 0 1 -1 -2 -1
Gx = -2 0 2 Gy = 0 0 0
-1 0 1 1 2 1
"""*
Gx = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
Gy = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])
W = np.size(image, 0)
H = np.size(image, 1)
amplitude = np.zeros([W - 2, H - 2]) # 幅值数组
angle = np.zeros([W - 2, H - 2]) # 角度数组
for i in range(W - 2):
for j in range(H - 2):
dx = np.sum(image[i:i + 3, j:j + 3] \* Gx)
dy = np.sum(image[i:i + 3, j:j + 3] \* Gy)
amplitude[i, j] = np.sqrt(dx \*\* 2 + dy \*\* 2)
angle[i, j] = math.atan2(dy, dx)
return amplitude, angle
-
非最大值抑制(NMS)
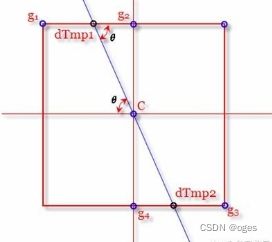
当我们计算一点C时我们会找到他梯度方向的相邻点dTmp1与dTmp2。如果C点不是这三个点中的最大值时,我们则将C点的像素值置0。
计算dTmp1时我们可能会遇到这两个点并不能直接被获取,这时我们用类似线性插值的方式,用它临近点g1与g2共同来描述该点的像素值。具体的权重通过theta角度算tan值来描述。这里涉及一些数学中角度换算的过程,详细信息如代码所示:
def NMS(amplitude, angle):
*""" Non-maxima suppression
非最大值抑制
遍历梯度方向两个其他节点
如果有值比本身大,则将本身置为0
"""*
W = np.size(amplitude, 0)
H = np.size(angle, 1)
nms = amplitude.copy()
# 当梯度不为45的整数倍时 通过同行相邻节点加权算出该点的值
# 通过角度来计算权重
for i in range(1, W - 1):
for j in range(1, H - 1):
theta = angle[i, j]
weight = np.tan(theta)
# 不同角度的权重不同
if theta > np.pi / 4:
d1 = [0, 1]
d2 = [1, 1]
weight = 1 / weight
elif theta >= 0:
d1 = [1, 0]
d2 = [1, 1]
elif theta >= - np.pi / 4:
d1 = [1, 0]
d2 = [1, -1]
weight \*= -1
else:
d1 = [0, -1]
d2 = [1, -1]
weight = -1 / weight
g1 = amplitude[i + d1[0], j + d1[1]]
g2 = amplitude[i + d2[0], j + d2[1]]
g3 = amplitude[i - d1[0], j - d1[1]]
g4 = amplitude[i - d2[0], j - d2[1]]
grade\_count1 = g1 \* weight + g2 \* (1 - weight)
grade\_count2 = g3 \* weight + g4 \* (1 - weight)
if grade\_count1 > amplitude[i, j] or grade\_count2 > amplitude[i, j]:
nms[i, j] = 0
return nms
-
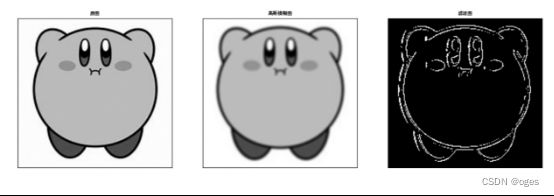
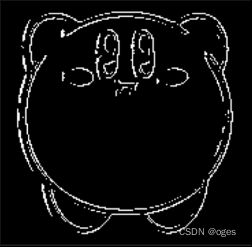
双阈值抑制
设有阈值T1 这里通过dfs算法扫描所有的大于T2的点,并扫描这些点的边缘中是否有大于T1的点。将所有小于T1的点删除,将大于T2的点和大于T1且与大于T2的点相连的点保留。 注:图片中一个像素点的斜上、下方都是该点的相邻点,所以遍历它相邻点时,方向数组应该有八个值。 以下三张图片分别为原图、模糊图、与结果图 展示代码如下所示: Canny算子的双阈值抑制算法与最终结果的数值息息相关,要想得到一个非常好的边缘检测结果,那这两个值可能需要精心选择。其结果较为精准,能将轮廓与背景很好的区分。 相比来说sobel算子处理图片速度更快,但Canny算子更经典,精准度更高,能更好的去除噪音并保留更清晰的线条。Canny边缘检测之所以优秀是因为它在一阶微分算子的基础上,增加了非最大值抑制和双阈值两项改进。利用非极大值抑制不仅可以有效地抑制多响应边缘,而且还可以提高边缘的定位精度;利用双阈值可以有效减少边缘的漏检率。但Canny算子设计更多参数,需要更准确地设置参数,更繁杂一些。 其代码如下:
def double\_threshold(nms, threshold1, threshold2):
*""" Double Threshold
通过dfs找出所有强像素点的所有联通点
"""*
visited = np.zeros\_like(nms)
output\_image = nms.copy()
W, H = output\_image.shape
def dfs(i, j):
*"""
当像素值超过第二阈值时直接保留
像素值小于第一阈值时直接删除
与第二阈值相连的且大于第一阈值的像素保留
通过dfs来查询这些与第二阈值相连的大于第一阈值的点
"""*
#方向数组
dx = [-1, -1, -1, 0, 0, 1, 1, 1]
dy = [-1, 0, 1, -1, 1, -1, 0, 1]
if i >= W or i < 0 or j >= H or j < 0 or visited[i, j] == 1:
return
visited[i, j] = 1
if output\_image[i, j] > threshold1:
output\_image[i, j] = 255
for p in range(0, 8):
dfs(i + dx[p], j + dy[p])
else:
output\_image[i, j] = 0
for w in range(W):
for h in range(H):
if visited[w, h] == 1:
continue
if output\_image[w, h] >= threshold2:
dfs(w, h)
elif output\_image[w, h] <= threshold1:
output\_image[w, h] = 0
visited[w, h] = 1
# 将剩余其他不连通的点置为0
for w in range(W):
for h in range(H):
if visited[w, h] == 0:
output\_image[w, h] = 0
return output\_image
Canny结果展示
def canny(image):
smoothed\_image = smooth(image)
amplitude, angle = getGradAngle(smoothed\_image)
nms = NMS(amplitude, angle)
output\_image = double\_threshold(nms, 10, 60)
plt.figure("Canny", frameon=False)
plt.subplot(1, 3, 1)
plt.imshow(image)
plt.title("原图", fontsize=8)
plt.xticks([])
plt.yticks([])
plt.subplot(1, 3, 2)
plt.imshow(smoothed\_image)
plt.title("高斯模糊图", fontsize=8)
plt.xticks([])
plt.yticks([])
plt.subplot(1, 3, 3)
plt.imshow(output\_image)
plt.title("滤波图", fontsize=8)
plt.xticks([])
plt.yticks([])
# plt.show()
6.Canny结果分析
Sobel与Canny算子对比

代码地址:
https://gitee.com/orangeinus/xd_-cs_computer_vison_1.git