嵌入式面试准备
题目都摘于网上
- 嵌入式系统中经常要用到无限循环,如何用C编写死循环
while(1){}或者for(;
- 内存分区
代码区,全局区(全局变量,静态变量,以及常量),栈区,堆区
- const关键字的含义作用
const意味着"只读"
定义常量,修饰的变量不可变
可以保护被修饰的东西,防止意外的修改,增强程序的健壮性
1.const int a; #变量a不可修改
2.int const a; #变量a不可修改
3.const int *a; #指针指向的值不可修改,指针的指向可以修改
4.int * const a; #指针的指向不可以修改,指针指向的值可以修改
5.const int * const a; #指针指向的值和指针的指向都不可以修改
6.int const * const a; #指针指向的值和指针的指向都不可以修改
const和函数
通常在函数形参中,如果形参是一个指针,为了防止在函数内部修改指针指向的数据,就可以用const来限制
void StringCopy(char* strDestination, const char *strSource);
还可以表示函数返回一个常量,放在函数的返回值的位置
const char * GetString(void);
- static关键字的含义作用
A.在函数体,一个被声明为静态的变量在这一函数被调用过程中维持其值不变;
B.在模块内(但在函数体外),一个被声明为静态的变量可以被模块内所有函数访问,但不能被模块外其它函数访问。它是一个本地的全局变量;
C.在模块内,一个被声明为静态的函数只可被这一模块内的其它函数调用。那就是,这个函数被限制在声明它的模块的本地范围内使用;
- volatile关键字的含义作用
volatile的变量是说这变量可能会被意想不到地改变,编译器在用到这个变量时,不需要对它进行优化。
- malloc、free和new、delete的区别?
malloc 和 free 是 C 语言标准库中的函数,而 new 和 delete 是 C++ 中的操作符。
malloc 和 free 以字节为单位进行内存管理,需要手动指定需要分配或释放的字节数,而 new 和 delete 以对象为单位进行内存管理,无需手动计算需要分配或释放的字节数,编译器会自动计算。
malloc 返回的是 void* 类型的指针,需要显式地进行类型转换,而 new 返回的是分配对象的指针,不需要显式地进行类型转换。
new 和 delete 可以自动调用构造函数和析构函数,而 malloc 和 free 不会调用构造函数和析构函数。
new 失败时会抛出 std::bad_alloc 异常,而 malloc 失败时返回 NULL。
在 C++ 中,使用 new 和 delete 可以确保类型安全,而 malloc 和 free 可能存在类型不匹配的问题。
- 给定一个包含非负整数的 m x n 网格 grid ,请找出一条从左上角到右下角的路径,使得路径上的数字总和为最小。
- c语言如何运行的
(1)预处理(Preprocessing):用于将所有的#include头文件以及宏定义替换成其真正的内容; (2)编译(Compilation):将经过预处理之后的程序转换成特定汇编代码的过 (3)汇编(Assemble):将上一步的汇编代码转换成机器码,产生的文件叫做目标文件(.o); (4)链接(Linking):链接过程将多个目标文件以及所需的库文件(.so等)链接成最终的可执行文件(.exe)。 一个现代编译器的主要工作流程:源代码(.c)→ 预处理器(.i) → 编译器 (.s)→ 目标代码 (.o)→ 链接器 → 可执行程序 。
- 指针函数和函数指针的区别
针函数和函数指针是两个不同的概念:
指针函数(Pointer to Function):指针函数是一个具有指针类型返回值的函数。它是一个函数,但其返回值是一个指针,指向函数或者指向其他类型的数据。可以像使用函数一样调用这个指针函数,通过调用指针函数获取返回的指针值,然后可以对该指针值进行进一步的操作。
函数指针(Function Pointer):函数指针是指向函数的指针变量。它是一个变量,存储了函数的地址,可以通过函数指针来调用这个函数。函数指针可以像普通函数一样被调用,通过函数指针调用函数可以避免直接使用函数名来调用函数,提供了灵活性和动态性。
总结区别:
指针函数是一个函数,但其返回值是一个指针类型。 函数指针是指向函数的指针变量,可以存储函数地址并通过函数指针调用函数。
指针函数用于返回指向函数或其他类型数据的指针。 函数指针用于实现函数回调,动态选择调用的函数或在运行时替换函数。
指针函数和函数指针在用法和概念上有所不同,在具体编程场景中使用时要注意区分。
- 进程和线程的区别
1:调度:线程作为调度和分配的基本单元,进程作为拥有资源的基本单位;
2:并发性:不仅进程可以并发执行,同一进程内的线程也可以并发执行。
3:拥有资源:进程是拥有资源的基本独立单元,线程不拥有资源,但可以访问进程内的资源;
线程和进程都是操作系统中用于执行任务的概念,它们之间存在联系和区别。
联系:
线程和进程都是程序执行的基本单元。 一个进程可以包含多个线程,即多线程是在同一个进程内并发执行的。
进程和线程都有自己的执行上下文和调度状态。 进程和线程都能够执行代码和访问内存。 进程和线程都可以同时执行,从而提高程序的并发性和响应性。
区别:进程是操作系统资源分配的最小单位,而线程是 CPU 调度的最小单位。进程拥有独立的内存空间,而线程共享所属进程的内存空间。
进程之间相互独立,彼此不能直接访问对方的资源,而线程可以直接访问所属进程的资源。
创建和销毁进程的开销比创建和销毁线程的开销大。进程切换涉及到切换内存空间和系统资源等,而线程切换只需要切换 CPU 的上下文。
进程之间通信需要使用特定的机制(如管道、共享内存等),而线程之间通信可以直接读写共享变量。
根据不同的应用场景和需求,选择使用进程还是线程具体取决于多线程并发执行、资源隔离、代码复用等方面的考虑。
- 引用与指针有什么区别?
(1)引用必须被初始化,指针不必。
(2)不存在指向空值的引用,但是存在指向空值的指针。
(1)指针是实体,占用内存空间;引用是别名,与变量共享内存空间。 (2)指针不用初始化或初始化为NULL;引用定义时必须初始化。
(3)指针中途可以修改指向;引用不可以。 (4)指针可以为NULL;引用不能为空。
(5)sizeof(指针)计算的是指针本身的大小;而sizeof(引用)计算的是它引用的对象的大小。
(6)如果返回的是动态分配的内存或对象,必须使用指针,使用引用会产生内存泄漏。 (7)指针使用时需要解引用;引用使用时不需要解引用‘*’。
(8)有二级指针;没有二级引用。
- 大端和小端
大端存储:将一个数的低位字节的内容放在高地址处,高位字节的内容放在低地址处
小端存储:将一个数的低位字节的内容放在低地址处,高位字节的内容放在高地址处

- ROM与RAM
ROM是Read OnlyMemory的缩写,RAM是Random Access Memory的缩写。ROM在系统停止供电的时候仍然可以保持数据,而RAM通常都是在掉电之后就丢失数据,典型的RAM就是计算机的内存。
-
IO口工作方式:上拉输入 下拉输入 推挽输出 开漏输出
-
请说明总线接口USRT、I2C、USB的异同点(串/并、速度、全/半双工、总线拓扑等)

-
I2C协议时序图
IC协议有两根线,一根SCL时钟线,一根SDA数据线,如图可以看到开始信号和结束信号的电平状态。开始后,因为IIC总线可以挂在很多设备(不超过8个),所以先发送一个设备地址,选中这个设备,设备地址最后一位代表了是写还是读。选中设备后,再发送寄存器地址,代表选中某个寄存器,再开始传输数据。
八位设备地址=7位从机地址+读/写地址,
再给地址添加一个方向位位用来表示接下来数据传输的方向,
0表示主设备向从设备(write)写数据,
1表示主设备向从设备(read)读数据
- I2C总线在传送数据过程 有三种类型信号, 它们分别是:开始信号、结束信号和应答信号。
开始信号:SCL保持高电平,SDA是高电平到低电平的切换
结束信号:SCL保持高电平,SDA是低电平到高电平的切换
应答信号:接收数据的 IC 在接收到 8bit 数据后,向发送数据的 IC 发出特定的低电平脉冲,表示已收到数据。CPU 向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU 接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
IIC信号在数据传输过程中,当SCL=1高电平时,数据线SDA必须保持稳定状态,不允许有电平跳变,只有在时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。SCL=1时 数据线SDA的任何电平变换会看做是总线的起始信号或者停止信号。
- FIQ中断向量入口地址
FIQ和IRQ是两种不同类型的中断,ARM为了支持这两种不同的中断,提供了对应的叫做FIQ和IRQ处理器模式(ARM有7种处理模式)。
FIQ的中断向量地址在0x0000001C,而IRQ的在0x00000018。
-
SPI四种模式,简述其中一种模式,画出时序图


-
sizeof和strlen的区别?
答案:sizeof是运算符,在编译时即计算好了;而strlen是函数,要在运行时才能计算。
- 在某工程中,要求设置一绝对地址为0x67a9的整型变量的值为0xaa66。编译器是一个纯粹的ANSI编译器。写代码去完成这一任务?
答案:
int p;
p = (int)0x67a9;
*p = 0xaa66;
- 堆和栈的区别
堆(Heap)和栈(Stack)是两种常见的内存管理方式,它们在内存分配和释放的机制上有一些区别。
分配方式:
堆:堆内存的分配由程序员手动管理,通过动态分配,例如使用malloc()、new等函数来申请内存。堆分配的内存需要显式地释放,否则可能导致内存泄露。
栈:栈内存的分配与函数调用的方式紧密相关。每当调用一个函数时,函数的局部变量和参数会在栈上动态分配,函数调用结束后,这些变量和参数会自动被释放。
内存管理:堆:堆内存的管理是由程序员手动控制的。在申请堆内存后,需要负责释放这块内存,以避免内存泄漏。如果不及时释放,会造成内存的浪费。
栈:栈内存的管理由编译器自动完成,无需程序员手动干预。当函数调用结束时,栈上的局部变量会自动释放,内存被回收,不存在内存泄露的问题。
内存分配速度:堆:堆内存的分配速度相对较慢,因为需要在堆中搜索合适大小的空闲空间。在大型程序中,频繁地进行堆内存分配和释放可能会导致效率下降。
栈:栈内存的分配速度相对较快,仅仅是栈指针的移动,所以栈上的内存分配和释放操作非常高效。 存储大小:堆:堆内存的大小通常比较大,由操作系统管理。在现代计算机系统中,堆的大小通常受到操作系统或运行时环境的限制。
栈:栈内存的大小通常比较小,由编译器或运行时环境进行限制。栈的大小是有限制的,一般为数MB到数十MB。 总结区别:堆和栈是两种内存管理方式,分配方式和内存管理方式不同。 堆内存需要手动分配和释放,而栈内存会自动分配和释放。
堆内存的分配速度较慢,栈内存的分配速度较快。 堆内存的大小通常比较大,而栈内存的大小通常较小。
- 数组和链表的区别
数组存数据按照顺序存储,固定大小; 链表存数据随机,大小可以动态改变
- struct和union比较
相同点:二者都是常见的结构,都是由多个不同的数据类型成员组成
不同点:联合体中所有的成员公用一块地址空间,即联合体只存放一个被选中的成员,内存空间是最长成员占用的空间,需要进行内存对齐
结构体所有成员占用空间是累加的,其所有成员都存在,不同成员存在不同的地址,内存空间等于所有成员占用的空间之和,同样需要内存对齐。
- 数组指针和指针数组
数组指针是一个指针,指向一个数组。
指针数组由n个指针类型的数组元素组成。
数组指针只是一个指针变量,似乎是C语言里专门用来指向二维数组的,它占有内存中一个指针的存储空间。
指针数组是多个指针变量,以数组形式存在内存当中,占有多个指针的存储空间。
- 常量指针和指针常量
常量指针:指针指向的值不可以修改,指针的指向可以修改
指针常量:指针指向的值可以改,指针的指向不可以改
- zigbee OSAL是怎么样的
是一种基于事情驱动的轮询式操作系统,所提供的管理功能有
(1)任务登记,任务初始化,任务触发
(2)任务间消息传递
(3)任务同步
(4)中断处理
(5)计时器
(6)内存分配
不断轮询遍历所有任务事件,事件被置位后就会被调度执行该任务:需要注意的是每次任务被调度时都只处理一个事件,并在处理完后清除该事件。
每个任务最多可以同时设置16个事件
任务事件被置位,即任务调度,主要通过以下两种途径实现:
(1)直接通过调用 osal _ set _ event()给任务事件置位。
(2)任务调度结束后返回,通过返回未处理完的事件位重新置位。在下一轮任务轮询中,将继续处理
实时操作系统 (RTOS) 中的任务间通信可以使用以下几种手段:
消息传递 (Message Passing):
任务通过发送和接收消息来进行通信。消息可以包含数据和控制信息,常见的消息传递机制包括消息队列、邮箱和管道。信号量 (Semaphore):
信号量是一种同步机制,用于控制对共享资源的访问。任务可以使用信号量来申请和释放资源,并通过信号量的值来进行同步和互斥操作。事件标志组 (Event Flags):
任务可以等待或等待特定的事件发生,当事件发生时,任务可以被唤醒并继续执行。事件标志组可以将多个事件进行组合,每个事件可以用一个特定的标志来表示。邮箱 (Mailbox):
邮箱是一种用于在任务之间传递数据的机制。任务可以将数据放入邮箱中,其他任务可以从邮箱中读取数据,实现任务间的数据交换。共享内存 (Shared Memory):
共享内存是一块被多个任务共享的内存区域。任务可以通过读写这块内存来进行数据交换。为了确保并发访问的正确性,通常需要使用互斥锁或信号量进行保护。这些任务间通信的手段可以根据实际需求选择合适的方式,在设计实时系统时需要考虑数据的实时性、同步性和互斥性等因素。
- 面向对象编程(Object-Oriented Programming,简称OOP)的三大特性是:
封装(Encapsulation):封装是将数据(属性)和操作(方法)封装在一个对象中,对外部隐藏内部实现的细节,只提供有限的接口供其他对象进行交互。封装提供了数据的保护和控制,通过定义公共接口,可以控制对对象内部数据的访问和操作,增加了代码的可维护性和可重用性。
继承(Inheritance):继承是指一个类(子类)可以继承另一个类(父类)的属性和方法,并可以在此基础上进行功能的扩展或修改。通过继承,子类可以继承父类的通用行为和属性,避免了重复编写相同的代码。继承也支持多层次的继承,形成类的层次结构,提供了代码的组织和管理。
多态(Polymorphism):多态是指同一种行为或操作可以具有多种不同的表现形式。在面向对象编程中,多态性通过继承和重写方法实现。多态性使得在对对象进行操作时,可以根据上下文的不同选择合适的方法,实现了代码的灵活性和扩展性。多态性还可以通过接口(接口多态)实现,使得不同的类可以实现相同的接口,从而具有相同的行为。
- TCP与UDP的区别

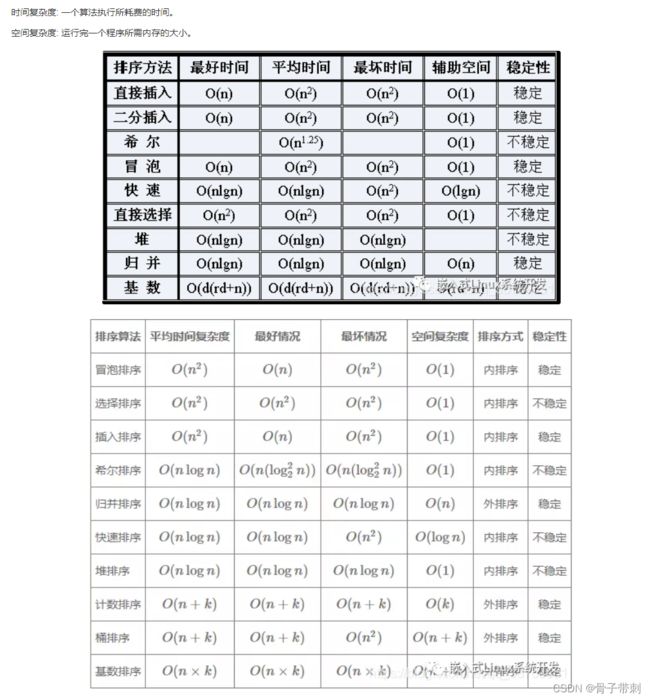
- 算法优劣评价术语
- 死锁的原因、条件
产生死锁的原因主要是:
(1) 因为系统资源不足。
(2) 进程运行推进的顺序不合适。
(3) 资源分配不当等。
如果系统资源充足,进程的资源请求都能够得到满足,死锁出现的可能性就很低,否则就会因争夺有限的资源而陷入死锁。其次,进程运行推进顺序与速度不同,也可能产生死锁
这四个条件是死锁的必要条件,只要系统发生死锁,这些条件必然成立,而只要上述条件之一不满足,就不会发生死锁。
(1) 互斥条件:一个资源每次只能被一个进程使用。
(2) 请求与保持条件:一个进程因请求资源而阻塞时,对已获得的资源保持不放。
(3) 不剥夺条件:进程已获得的资源,在末使用完之前,不能强行剥夺。
(4) 循环等待条件:若干进程之间形成一种头尾相接的循环等待资源关系。
- list和vector的区别
在编程语言中,"list"和"vector"通常代表不同的数据结构和容器类型,其主要区别如下:
内部实现:在许多编程语言中,"list"通常是一个链表或双向链表,它的元素在内存中可以是分散存储的,通过指针相互连接;而"vector"通常是一个连续的内存块,它的元素在内存中是连续存储的,通过索引访问。
大小调整:由于内部实现的不同,"list"支持动态调整大小,插入和删除元素的时间复杂度是
O(1);而"vector"的大小通常是固定的,当需要调整大小时,可能需要重新分配内存和复制元素,插入和删除元素的时间复杂度是 O(n)。访问效率:由于连续存储的特性,"vector"的访问效率更高,通过索引直接访问元素,时间复杂度是
O(1);而"list"需要从头节点开始逐个遍历,时间复杂度是 O(n)。插入和删除效率:在插入和删除元素方面,"list"由于其链表结构,在特定位置插入和删除元素的时间复杂度是
O(1);而"vector"由于需要移动后续元素,时间复杂度是 O(n)。综上所述,"list"适用于频繁插入和删除元素、对随机访问不敏感的场景,而"vector"适用于频繁随机访问、对插入和删除操作要求不高的场景。根据具体的需求和使用场景,选择合适的数据结构可以提高程序的效率和性能。
-
中断不能返回一个值,中断不能传递参数
-
预处理器标识#error的目的是什么
预处理器标识#error的目的是向编译器发送错误信息并停止编译过程。当预处理器遇到#error指令时,它会将紧随其后的错误消息作为编译错误的一部分,并在编译过程中生成一个错误。
使用#error指令可以在预处理阶段检测到编译时错误或不满足特定条件的情况,例如:
条件检查:当某个条件不满足时,可以使用#error指令提供有关问题的提示,例如要求编译时使用特定的编译器标志或环境变量。
版本控制:当代码需要在特定版本或以上的编译器中编译时,可以使用#error指令检查编译器版本,并提供相应的错误消息。
模块选择:当需要选择特定的代码模块或功能时,可以使用#error指令阻止编译,以确保代码不会在不兼容的环境中运行。
通过使用#error指令,开发者可以在编译时提供有用的错误信息,帮助识别潜在的问题并加快问题定位与解决过程。
- 一个参数既可以是const还可以是volatile吗
可以的,例如只读的状态寄存器。它是volatile因为它可能被意想不到地改变。它是const因为程序不应该试图去修改它。
一个定义为volatile的变量是说这变量可能会被意想不到地改变,这样,编译器就不会去假设这个变量的值了。精确地说就是,优化器在用到这个变量时必须每次都小心地重新读取这个变量的值,而不是使用保存在寄存器里的备份
volatile修饰符告诉complier变量值可以以任何不被程序明确指明的方式改变,最常见的例子就是外部端口的值,它的变化可以不用程序内的任何赋值语句就有可能改变的,这种变量就可以用volatile来修饰,complier不会优化掉它。
const修饰的变量在程序里面是不能改变的,但是可以被程序外的东西修改,就象上面说的外部端口的值,如果仅仅使用const,有可能complier会优化掉这些变量,加上volatile就万无一失了。
- 对于一个频繁使用的短小函数,在C语言中应用什么实现,在C++中应用什么实现?
答案:c用宏定义,c++用inline
- NPU 模型转换
步骤是导入模型-> 创建配置文件->量化->预推理->导出模型->部署测试
- NPU 模型部署的流程
数据预处理,加载模型到NPU,NPU执行计算,计算结果后处理
计算后 NPU 会输出一个 tensor 数据,这时候就需要数据后处理,将 tensor 数据转换为具体的坐标与类型,就可以反馈到上层应用程序做应用的处理了
- 管道,消息队列,信号量的联系和区别
管道、消息队列和信号量是操作系统中常用的同步和通信机制,它们有一些联系和区别。
联系:
同步和通信:管道、消息队列和信号量都用于实现进程或线程之间的同步和通信。 进程间通信:它们都可以用于不同进程之间的通信和数据传递。 区别:
数据传递方式:
管道:是一种半双工的通信方式,数据按顺序通过一个缓冲区从一个进程传递到另一个进程。通常用于父子进程之间或具有共同祖先的进程之间的通信。
消息队列:是一种消息传递机制,允许进程在独立的时间段将消息放入队列中,然后其他进程可以从队列中读取消息。消息队列的数据传递是基于消息的,进程可以按需读取和处理消息。
信号量:是一种计数器,用于控制多个进程对共享资源的访问。通过对信号量的操作,进程可以等待、同步和互斥地访问共享资源。 用途:管道:主要用于在父子进程之间传递数据,典型的应用场景是通过管道实现shell命令的管道连接。
消息队列:适用于多个进程之间的松散耦合的通信,允许进程按照消息的顺序进行通信,典型的应用包括客户端-服务器模型和分布式系统。
信号量:用于同步和互斥访问共享资源,防止竞态条件和数据不一致性。 阻塞机制:管道:读取或写入管道时可以发生阻塞。如果读取进程尝试从空管道中读取数据,它将等待直到有数据被写入。如果写入进程尝试往满的管道中写入数据,它将等待直到有空间可用。
消息队列:读取消息队列时可以选择阻塞或非阻塞。进程可以选择在没有可用消息时阻塞等待,或者立即返回并继续执行。
信号量:进程可以通过对信号量进行阻塞和非阻塞操作。当信号量的值为0时,进程可以选择阻塞等待信号量的值变为非零,或者立即返回。
总结起来,管道、消息队列和信号量是实现进程间通信和同步的不同机制。管道适用于父子进程之间的数据传递,消息队列适用于多个进程之间的松散耦合通信,信号量适用于对共享资源的访问控制和同步操作。