Pytorch:数据读取机制(DataLoader与Dataset)
目录
- 一、Pytorch的数据读取机制
-
- 1.Dataload
- 2.Dataset
- 3.实现
-
- 自定义类
- 划分数据集
- 实现
- Lenet回顾
- 参考资料
一、Pytorch的数据读取机制

数据模块中,DataLoader和DataSet就是数据读取子模块中的核心机制。
数据读取主要包含以下 3 个方面:
- 读取哪些数据:每个 Iteration 读取一个 Batchsize 大小的数据,每个 Iteration 应该读取哪些数据。
- 从哪里读取数据:如何找到硬盘中的数据,应该在哪里设置文件路径参数
- 如何读取数据:不同的文件需要使用不同的读取方法和库。
这三个方面对应如下的流程图:

做笔记的时候参考资料作者的画图更美观,这里也贴上了~

DataLoader的用于构建数据装载器, 根据batch_size的大小, 将数据样本分成若干batch去训练模型,而数据分配的过程需要读取数据,这个过程就是借助Dataset的getitem方法实现的。
也就是说要使用Pytorch读取数据,首先应该新建一个类MyDataset,这个类要继承Dataset类并且实现里面的__getitem__方法,该方法用于定义如何接收一个索引idx, 返回一个样本对应的data和label。 此外还需要实现__len__,该方法用于计算样本数据,__len__返回总的样本的个数。
由于DataLoader是一个可迭代对象,当构建完成后可以简要查看读取的数据,以验证数据格式。
下面简要地介绍DataLoader和Dataset:
1.Dataload
torch.utils.data.Dataloader
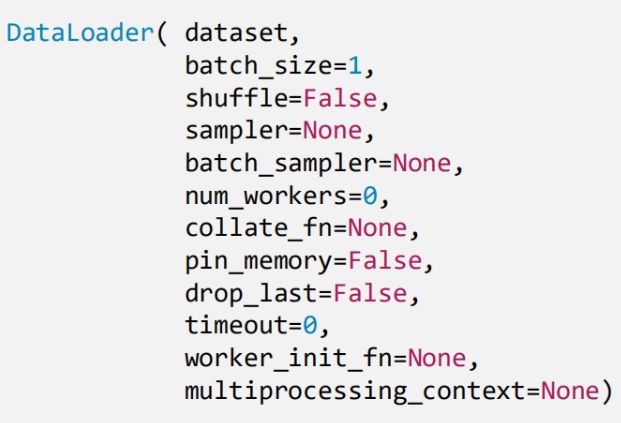
功能:构建可迭代的数据装载器。训练的过程中,每一次iteration从DataLoader中获取一个batch_size大小的数据。
主要修改的参数如下表所示:
| 方法 | 作用 |
|---|---|
| dataset | 数据集,决定数据从哪里读取,以及如何读取 |
| batch_size | 批量大小,默认为1 |
| num_workers | 使用多进程读取数据,设置的进程数 |
| drop_last | 是否丢弃最后一个样本数量不足batch_size批次数据 |
| shuffle | 个epoch是否乱序 |
Epoch、Iteration、Batchsize之间的关系:
1:所有的样本数据都输入到模型中,称为一个epoch
2:一个Batch的样本输入到模型中,称为一个Iteration
3:一个批次的大小,一个Epoch=Batchsize*Iteration
例如: 假设样本总数80, Batchsize是8, 1Epoch=10 Iteration。 假设样本总数是87, Batchsize是8, 如果drop_last=True(丢弃最后一个样本数量不足batch_size批次数据,因为最后的余数为7), 那么1Epoch=10Iteration, 如果等于False, 那么1Epoch=11Iteration, 最后1个Iteration有7个样本。
测试代码在后面实现的时候附上
2.Dataset
torch.utils.data.Dataset

功能:用来定义数据从哪里读取以及如何读取。Dataset抽象类,所有自定义的Dataset需要继承它,并且复写
主要修改的参数如下表所示:
| 方法 | 作用 |
|---|---|
| init | 初始化函数。在初始化过程中,应该输入数据目录信息和其他允许访问的信息。例如从csv文件加载数据,也可以使用加载文件名列表,其中每个文件名代表一个数据。注意:在该过程中还未加载数据。 |
| len | 返回数据集的大小,用于对数据集文件总数的计数 |
| getitem | Dataset的核心,是必须复写的方法。作用是接收一个索引idx, 返回一个样本对应的data和label |
测试代码在后面实现的时候附上
3.实现
自定义类
# 自定义类
class RMBDataset(Dataset):
def __init__(self, data_dir, transform=None):
"""
rmb面额分类任务的Dataset
:param data_dir: str, 数据集所在路径
:param transform: torch.transform,数据预处理
"""
self.label_name = {"1": 0, "100": 1}
self.data_info = self.get_img_info(data_dir) # data_info存储所有图片路径和标签,在DataLoader中通过index读取样本
self.transform = transform
def __getitem__(self, index):
path_img, label = self.data_info[index]
img = Image.open(path_img).convert('RGB') # 0~255
if self.transform is not None:
img = self.transform(img) # 在这里做transform,转为tensor等等
return img, label
def __len__(self):
return len(self.data_info)
@staticmethod
def get_img_info(data_dir):
data_info = list()
for root, dirs, _ in os.walk(data_dir):
# 遍历类别
for sub_dir in dirs:
img_names = os.listdir(os.path.join(root, sub_dir))
img_names = list(filter(lambda x: x.endswith('.jpg'), img_names))
# 遍历图片
for i in range(len(img_names)):
img_name = img_names[i]
path_img = os.path.join(root, sub_dir, img_name)
label = rmb_label[sub_dir]
data_info.append((path_img, int(label)))
return data_info
划分数据集
import os
import random
import shutil
def makedir(new_dir): # 辅助函数,用于验证地址
if not os.path.exists(new_dir):
os.makedirs(new_dir)
# if __name__ == '__main__':
random.seed(1)
#dataset_dir = os.path.join("..", "..", "data", "RMB_data")
#相对路径,一般用/来表示,’.’ 表示py文件当前所处的文件夹的绝对路径,
#’..’ 表示py文件当前所处的文件夹上一级文件夹的绝对路径
# 注意要使用“\\”,否则“\”会被当成转义字符
dataset_dir = os.path.join( "data", "RMB_data") # 路径根据自己的文件所在位置设置。
split_dir = os.path.join("..", "..", "data", "rmb_split")
train_dir = os.path.join(split_dir, "train")
valid_dir = os.path.join(split_dir, "valid")
test_dir = os.path.join(split_dir, "test")
# 训练集和测试集、验证集比例
train_pct = 0.8
valid_pct = 0.1
test_pct = 0.1
for root, dirs, files in os.walk(dataset_dir):
for sub_dir in dirs:
imgs = os.listdir(os.path.join(root, sub_dir))
imgs = list(filter(lambda x: x.endswith('.jpg'), imgs))
random.shuffle(imgs)
img_count = len(imgs)
train_point = int(img_count * train_pct)
valid_point = int(img_count * (train_pct + valid_pct))
for i in range(img_count):
if i < train_point:
out_dir = os.path.join(train_dir, sub_dir)
elif i < valid_point:
out_dir = os.path.join(valid_dir, sub_dir)
else:
out_dir = os.path.join(test_dir, sub_dir)
makedir(out_dir)
target_path = os.path.join(out_dir, imgs[i])
src_path = os.path.join(dataset_dir, sub_dir, imgs[i])
shutil.copy(src_path, target_path)
print('Class:{}, train:{}, valid:{}, test:{}'.format(sub_dir, train_point, valid_point-train_point,
img_count-valid_point))
因为基础比较差,作者在路径这一块卡了小半天,小菜鸡最后还是解决啦,学习了以下os.path.join()和相对路径以及绝对路径的表示,希望也能够帮到其他小朋友不用踩雷。
前面提到
借鉴参考博客作者的话,看源代码最好是先把逻辑关系给看懂, 然后再具体深入进去看具体细节。前面提到过重点是__ getitem__ 方法的实现,会发现有一个data_info[index], 这个方法的大概意思就是通过提供的index经过一系列的处理后返回一个布尔型逻辑值。为了知道data_info是怎么来的,需要检索一下类的初始化部分__ init __,在看到赋值语句self.data_info = self.get_img_info(data_dir)后,又需要继续查看get_img_info(data_dir)。仔细查看这个函数的内容后发现,这个函数的参数是数据所在的路径data_dir,然后根据数据的路径去找到对应的数据,最后返回这个数据的位置和label,返回的格式是一个list,并且每一个list的元素是一个元组,格式就是[(样本1_loc, label_1), (样本2_loc, label_2), …(样本n_loc, label_n)]。这个list呢就是data_info的拿到的list,于是便可以通过索引index访问list中的元素(样本i_loc, label_i)了。
最后再回到__getitem __方法,便能够知道大概的意思了。第一行是通过索引index调用data_info方法得到一个样本图片的路径和label,然后第二行就是根据路径去找到这个图片并转化为RGB形式,最后第三行就是利用自定义的图像增广方法transform来对图片进行处理(如果图片是非空的话),最后返回样本的张量形式(上一节提到过tensor是Pytorch特有的一种数据形式)和label。
了解完大致的逻辑后便可以进行学习具体的细节实现了,这里我也偷个懒,就不继续叙述了。
话说到此呢,还是没有完成训练集和测试集的读取呢,我们继续查看
train_loader = DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True),第一个参数是上面定义的类RMBDataset,前面说到了这个类返回的是样本图片的张量形式和label,第二个参数BATCH_SIZE就是批量大小啦,而第三个参数shuffle就是是否打乱读取的顺序。
因为Dataloader的源码太长啦,具体实现就不细说了,先来看看tran_loader做的主要事情:输出了一个
实现
# ============================ step 1/5 数据 ============================
# split_dir = os.path.join("..", "..", "data", "rmb_split")
split_dir = os.path.join("data", "rmb_split")
train_dir = os.path.join(split_dir, "train")
valid_dir = os.path.join(split_dir, "valid")
norm_mean = [0.485, 0.456, 0.406] #均值
norm_std = [0.229, 0.224, 0.225] #标准差
#Compose是将一系列transforms方法进行有序地组合
train_transform = transforms.Compose([
transforms.Resize((32, 32)), #缩放为32*32大小
transforms.RandomCrop(32, padding=4), #随机裁剪
transforms.ToTensor(), #图像数据转换成张量,同时会进行归一化操作,把像素值从0-255归一化到0-1
transforms.Normalize(norm_mean, norm_std), #数据标准化,把数据均值变为0,标准差变为1
])
#验证集不需要随即裁剪
valid_transform = transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(norm_mean, norm_std),
])
# 构建MyDataset实例
train_data = RMBDataset(data_dir=train_dir, transform=train_transform)
valid_data = RMBDataset(data_dir=valid_dir, transform=valid_transform)
# 构建DataLoder
train_loader = DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True) #shuffle设置为True
valid_loader = DataLoader(dataset=valid_data, batch_size=BATCH_SIZE)
# ============================ step 2/5 模型 ============================
#初始化卷积神经网络LeNet
net = LeNet(classes=2)
net.initialize_weights()
# ============================ step 3/5 损失函数 ============================
criterion = nn.CrossEntropyLoss() #选择损失函数,分类任务通常采用交叉熵损失函数
# ============================ step 4/5 优化器 ============================
optimizer = optim.SGD(net.parameters(), lr=LR, momentum=0.9) #选择优化器,随机梯度下降
scheduler = torch.optim.lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.1) # 设置学习率下降策略
# ============================ step 5/5 训练 ============================
train_curve = list()
valid_curve = list()
for epoch in range(MAX_EPOCH):
loss_mean = 0.
correct = 0.
total = 0.
net.train()
#enumerate返回枚举对象,比如0 ‘Spring’, 1 'Summer', 3 'Fall', 4 'Winter'
for i, data in enumerate(train_loader): #不断从DataLoader中获取一个batch size大小的数据
# forward
inputs, labels = data
outputs = net(inputs)
# backward
optimizer.zero_grad()
loss = criterion(outputs, labels)
loss.backward()
# update weights
optimizer.step()
# 统计分类情况
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).squeeze().sum().numpy()
# 打印训练信息
loss_mean += loss.item()
train_curve.append(loss.item())
if (i+1) % log_interval == 0:
loss_mean = loss_mean / log_interval
print("Training:Epoch[{:0>3}/{:0>3}] Iteration[{:0>3}/{:0>3}] Loss: {:.4f} Acc:{:.2%}".format(
epoch, MAX_EPOCH, i+1, len(train_loader), loss_mean, correct / total))
loss_mean = 0.
scheduler.step() # 更新学习率
# validate the model
if (epoch+1) % val_interval == 0:
correct_val = 0.
total_val = 0.
loss_val = 0.
net.eval()
with torch.no_grad():
for j, data in enumerate(valid_loader):
inputs, labels = data
outputs = net(inputs)
loss = criterion(outputs, labels)
_, predicted = torch.max(outputs.data, 1)
total_val += labels.size(0)
correct_val += (predicted == labels).squeeze().sum().numpy()
loss_val += loss.item()
loss_val_epoch = loss_val / len(valid_loader)
valid_curve.append(loss_val_epoch)
# valid_curve.append(loss.item()) # 20191022改,记录整个epoch样本的loss,注意要取平均
print("Valid:\t Epoch[{:0>3}/{:0>3}] Iteration[{:0>3}/{:0>3}] Loss: {:.4f} Acc:{:.2%}".format(
epoch, MAX_EPOCH, j+1, len(valid_loader), loss_val_epoch, correct_val / total_val))
train_x = range(len(train_curve))
train_y = train_curve
train_iters = len(train_loader)
valid_x = np.arange(1, len(valid_curve)+1) * train_iters*val_interval # 由于valid中记录的是epochloss,需要对记录点进行转换到iterations
valid_y = valid_curve
plt.plot(train_x, train_y, label='Train')
plt.plot(valid_x, valid_y, label='Valid')
plt.legend(loc='upper right')
plt.ylabel('loss value')
plt.xlabel('Iteration')
plt.show()
# ============================ inference ============================
BASE_DIR = os.path.dirname(os.path.abspath(__file__))
test_dir = os.path.join(BASE_DIR, "test_data")
test_data = RMBDataset(data_dir=test_dir, transform=valid_transform)
valid_loader = DataLoader(dataset=test_data, batch_size=1)
for i, data in enumerate(valid_loader):
# forward
inputs, labels = data
outputs = net(inputs)
_, predicted = torch.max(outputs.data, 1)
rmb = 1 if predicted.numpy()[0] == 0 else 100
print("模型获得{}元".format(rmb))
Lenet回顾
由于运行代码的时候,发现用了Lenet网络,正巧就回顾一下Lenet的一些基本定义。
总体来看,(LeNet(LeNet-5)由两个部分组成:)
- 卷积编码器:由两个卷积层组成;
- 全连接层密集块:由三个全连接层组成。
该架构如下图所示。
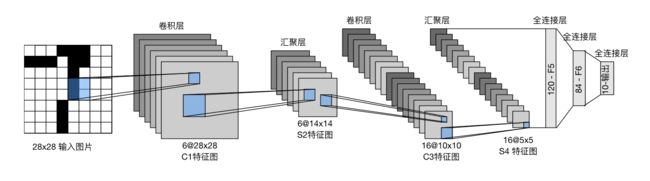
每个卷积块中的基本单元是一个卷积层、一个sigmoid激活函数和平均汇聚层。请注意,虽然ReLU和最大汇聚层更有效,但它们在20世纪90年代还没有出现。每个卷积层使用 5 × 5 5\times 5 5×5卷积核和一个sigmoid激活函数。这些层将输入映射到多个二维特征输出,通常同时增加通道的数量。第一卷积层有6个输出通道,而第二个卷积层有16个输出通道。每个 2 × 2 2\times2 2×2池操作(步幅2)通过空间下采样将维数减少4倍。卷积的输出形状由批量大小、通道数、高度、宽度决定。
为了将卷积块的输出传递给稠密块,必须在小批量中展平每个样本。换言之,将这个四维输入转换成全连接层所期望的二维输入。这里的二维表示的第一个维度索引小批量中的样本,第二个维度给出每个样本的平面向量表示。LeNet的稠密块有三个全连接层,分别有120、84和10个输出。因为在执行分类任务,所以输出层的10维对应于最后输出结果的数量。
以上就是Pytorch读取机制DataLoader和Dataset的原理和一个demo的实现啦~
参考资料
动手学深度学习
Pytorch教程
系统学习Pytorch笔记三