普中STM32-PZ6806L开发板(USART2 串口 + HI-LINK-V20离线语音模块控制LED灯)
简介
买了HI-LINK-V20型号的离线语音识别模块, 为了后面可以做有意思的东西, 现在先来用用, 使用USART2 串口 接收来自我在HI-LINK-V20中预设的动作, 当识别到词条时发送对应的指令到串口, HI-LINK串口接的就是STM32F03ZET6的USART2, 且往下看。
电路原理图
连线图
连线引脚表
| 板 | ||||
|---|---|---|---|---|
| STM32F103ZET6 | RX(PA3) | TX(PA2) | 3.3V | GND |
| HI-LINK-V20 | TX | RX | VCC | GND |
实物图
其他知识
更新离线词条
海凌科HLK-V2语音识别模块更新词条
协议
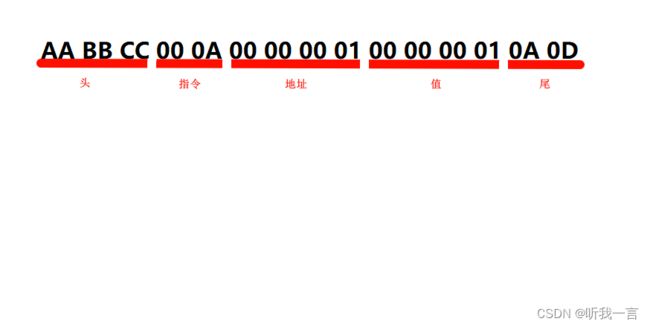
协议帧如上图,
头部 三字节
指令 两字节
地址 四字节
值 四字节
尾部 两字节
控灯指令 0x0A、灯的编址1~8\0xFF(全部灯), 灯的状态是值0/1/0xFF(全部灯打开)
控制灯1打开, 指令是: AA BB CC 00 0A 00 00 00 01 00 00 00 01 0A 0D
控制全部灯打开是 : AA BB CC 00 0A 00 00 00 FF 00 00 00 FF 0A 0D
实现步骤
创建项目
参考 普中STM32-PZ6806L开发板(HAL库函数实现-USART2 中断接收)
添加用户代码
hlk_v20.h
#ifndef __HLK_V20_H__
#define __HLK_V20_H__
#include "stm32f1xx_hal.h"
#define HLK_V20_COMMAND_VERSION 0x01
uint8_t HLK_V20_PreActionCheck(uint8_t *dat, uint32_t len);
void HLK_V20_ActionCallback(uint16_t cmd, uint32_t addr, uint32_t value); // 检测到完整指令, 将调用此函数
#endif //__HLK_V20_H__
hlk_v20.c
#include "hlk_v20.h"
#if HLK_V20_COMMAND_VERSION == 0x01
#define HLK_V20_COMMAND_LENGTH 15
#endif
__weak void HLK_V20_ActionCallback(uint16_t cmd, uint32_t addr, uint32_t value)
{
}
/*
* HLK_V20_PreActionCheck: 指令预处理
1. 检查指令是否完整;
2. 解析完完整指令则调用HLK_V20_ActionCallback执行指令
dat : buf
len : buf有效数据长度
return 0 : 命令不完整
1 : 命令完整并执行
*/
uint8_t HLK_V20_PreActionCheck(uint8_t *dat, uint32_t len)
{
if (HLK_V20_COMMAND_LENGTH > len) // 数据长度要达到指令数据长度
return 0;
uint16_t cmd = 0;
uint32_t addr = 0;
uint32_t value = 0;
#if HLK_V20_COMMAND_VERSION == 0x01
/*
Frame:
Head : 0xAA 0xBB 0xCC -> 3字节, 第1~3字节
CMD : 16bit -> 2 字节, 第4~5字节
ADDR : 32bit -> 4字节, 第6~9字节
Value: 32bit -> 4字节, 第10~13字节
Tail : 0x0A 0x0D-> 2字节, 第14~15字节
*/
if ( !(0xAA == dat[0] && 0xBB == dat[1] && 0xCC == dat[2] && 0x0A == dat[13] && 0x0D == dat[14]) )
{
return 0;
}
cmd = (dat[3]<<8)|dat[4];
addr = (dat[5]<<24) | (dat[6]<<16) | (dat[7]<<8) | dat[8];
value = (dat[9]<<24) | (dat[10]<<16) | (dat[11]<<8) | dat[12];
#endif
HLK_V20_ActionCallback(cmd, addr, value);
return 1;
}
绑定指令与相关功能
hlk_v20_demo.h
#ifndef __HLK_V20_DEMO_H__
#define __HLK_V20_DEMO_H__
#include "usart.h"
#define HLK_V20_DEMO_USART huart2
void HLK_V20_DEMO_Usart_RxCallback(UART_HandleTypeDef *huart);
void HLK_V20_DEMO_Action_Init(void);
#endif // __HLK_V20_DEMO_H__
hlk_v20_demo.c
#include "hlk_v20_demo.h"
#include "hlk_v20.h"
#include "LED/led.h"
#include "BEEP/beep.h"
#include 启用功能
main.c
/*
串口接收中断函数回调
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
HLK_V20_DEMO_Usart_RxCallback(huart); // 加入HLK_V20数据处理
}
int main()
{
....
HLK_V20_DEMO_Action_Init();
...
while(1)
{
HAL_Delay(1000); // 延时获得空闲资源
}
...
}
共赏
普中STM32-PZ6806L开发板(USART2 串口 + HI-LINK-V20离线语音模块控制LED灯)
代码
不需要下载, 基本代码上面都提供了
参考
普中STM32-PZ6806L开发板(HAL库函数实现-批量操作GPIO引脚实现跑马灯)
海凌科HLK-V2语音识别模块更新词条
普中STM32-PZ6806L开发板(HAL库函数实现-USART2 中断接收)