高通相机camx-chi 架构详解
和你一起终身学习,这里是程序员Android
经典好文推荐,通过阅读本文,您将收获以下知识点:
一.初步认知
二.CAMX整体架构
三.CAMX CHI-CDK基本组件
四.组件之间的关系
五.基础组件与上层交互
六.日志TAG:
七.其他
网上关于高通CameraHAL3的介绍文档不多,之前做高通CameraHAL3的一些总结、整理,杂乱了一点,将就着看吧。
一.初步认知
高通CameraHAL3的架构很庞大,代码量也很巨大。
先对CAMX、Chi-CDK的关键术语、目录等有个初步认知
1.1 CAMX CHI-CDK 体系里面几个关键的概念:
(1).Usecase :
顾名思义“使用案例”,也就是一个功能需求,
比如说 ZSL 功能是一个 usecase,HDR 是一个 usecase,多摄是一个 usecase,
一个 usecase 里面会可能包含多个 pipeline,多个功能 Feature,多个 isp 模块,多个 node。
整个 chi-cdk 是围绕 usecase 的实现搭建的体系。(2).Pipeline:
数据流管道,比如说创建了一个 preview 流,一个 video 流管道,这些数据流是以 pipeline 管道的形式流通的(3).Node:
功能节点,我们后面分析到的 camera 算法,是以一个节点嵌套在管道流中,这个节点相当于实现了算法的内容
比如dummyrtb 节点实现了双摄数据的融合处理,
remosaic 节点实现了数据的重排列,
staticaecalgo 节点实现了第三方 AEC 算法的接入等(4).Target:
目标对象,用来定义一些用到的参数信息(5).Topology:
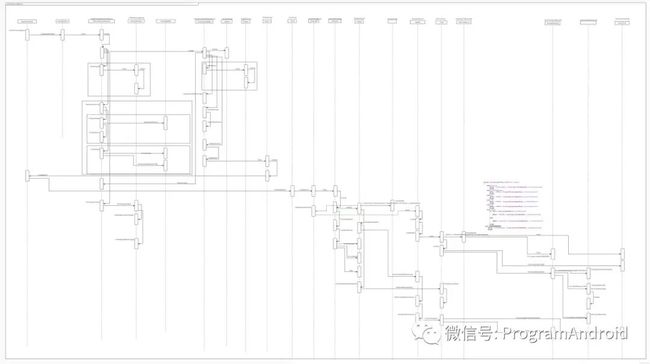
整个 usecase,pipeline 和 note 呈现的是一个拓扑链接的结构形式,这些拓扑结构以一个 xml 的形式来描述,这个 xml 描述了整个工程 camera 功能中usecase、pipeline 流,nete 的拓扑关系及其参数的配置参数等。
SM7450 工程默认使用的是 chi-cdk/oem/qcom/topology/titan/fillmore/fillmore_usecase.xml
1.2 术语
ABF :Auto Bayer Filter,Bayer 域的降噪算法
ACE :Advanced Chroma Enhancement 高级色度增强
ADRC:automatic dynamic range compression 自动动态范围压缩
AFD :Auto Flicker Detection,频闪自动检测
ASD :Auto Scene Detection
ASF :Adaptive Spatial Filter,自适应空间滤波
BDS :Bayer Download Scaler
BPC :Bad Pixel Correction,坏点校准
BPS :Bayer processing segment(for snapshot)
CDS :Chroma DownSampler
CDK :Camera Development Kit 相机开发包
CHI :Camera Hardware Interface 相机硬件接口
CS :Chroma Suppression,色度抑制
CSID:Camera serial interface decoder module
CV :Chroma Enhancement 色度增强
DPU :Display processing unit
GTM :Global Tone Mapping, 全局色调映射
IFE :Image Front End,Sensor 输出的数据首先会到达IFE
IPE :Image processing engine
KMD :Kernal ModeDriver
LPM :low power manager(低功耗下运行)
LTM :Local Tone Mapping,局部色调映射
MCTF:Motion Compensation Temporal Filtering 录像时的多帧降噪
MCE :Memory Color Enhancement
MFNR:Multi Frame Noise Reduction 拍照时的多帧降噪
OPE :Offline Processing Engine
PDAF:phase difference auto focus,相位对焦
QCFA:Quad (Bayer Coding) Color Filter Arrangement/Array
RDI :Raw Dump Interface
RTB :Real Time Bokeh
SCE :Skin Color Enhancement, 肤色增强
TNR :temporal noise reduction,时域降噪
TFE :Thin Front End
UMD :User Mode Driver
VPU :Video processing unit(codec)
WNR :Wavelet Noise Reduction,小波降噪,Yuv域的降噪算法
1.3 主要目录
1.3.1 CAMX中有如下几个主要目录:
core/ :
用于存放camx的核心实现模块,其中还包含了主要用于实现hal3接口的hal/目录,以及负责与CHI进行交互的chi/目录csl/:
用于存放主要负责camx与camera driver的通讯模块,为camx提供了统一的Camera driver控制接口hwl/:
用于存放自身具有独立运算能力的硬件node,该部分node受csl管理swl/:
用于存放自身并不具有独立运算能力,必须依靠CPU才能实现的node
1.3.2 Chi-Cdk 中有如下几个主要目录:
chioverride/:
用于存放CHI实现的核心模块,负责与camx进行交互并且实现了CHI的总体框架以及具体的业务处理。bin/:
用于存放平台相关的配置项topology/:
用于存放用户自定的Usecase xml配置文件node/:
用于存放用户自定义功能的nodemodule/:
用于存放不同sensor的配置文件,该部分在初始化sensor的时候需要用到tuning/:
用于存放不同场景下的效果参数的配置文件sensor/:
用于存放不同sensor的私有信息以及寄存器配置参数actuator/:
用于存放不同对焦模块的配置信息ois/:
用于存放防抖模块的配置信息flash/:
存放着闪光灯模块的配置信息eeprom/:
存放着eeprom外部存储模块的配置信息fd/:
存放了人脸识别模块的配置信息
二.CAMX整体架构
2.1 CAMX整体的架构图:

2.2 CAMX CHI-CDK通信机制
CAMX与 CHI-CDK 通过互相dlopen对方的So库,获取了对方的入口方法:

2.3 CameraHAL3数据流向
CamraHAL3数据流向图:

Camera数据从sensor出来,首先会经过IFE,然后分预览/视频和拍照2种情况。
如果是预览或者录像,是先经过IPE处理,最后输出到显示。
如果是拍照,则是先经过BSP处理,然后再经过JPEG编码器,最后保存为图片输出。
IFE、IPE、BPS、JPEG,它们分别表示芯片内部的硬件处理单元,
数据在这些单元内部的处理还是比较复杂的,在不同的处理单元里面,会进行一些复杂的算法处理,这里先有个认识,有个基本概念。
三.CAMX CHI-CDK基本组件
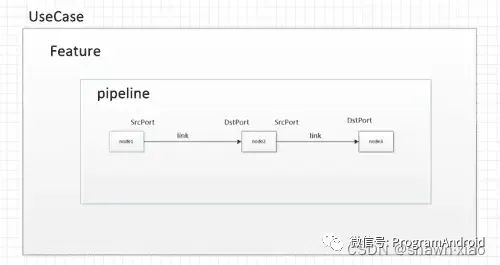
3.1 UseCase
UseCase,字面意思:用例
官方注解:
A set of streams configured by the client combined with a set of static properties specifying the processing of those streams
由客户端配置的一组流,这组流是有着一系列静态属性相结合描述的流
See createCaptureSession in the Android CameraDevice documentation
结合下面这段代码来好好理解下:
//UseCase: 预览+录像
List surfaces = new ArrayList<>();
if(previewSurface != null && previewSurface.isValid()){
surfaces.add(previewSurface);
mPreviewBuilder.addTarget(previewSurface);
}
if(mMediaRecorder != null && mMediaRecorderSurface != null
&& mMediaRecorderSurface.isValid()){
surfaces.add(mMediaRecorderSurface);
mPreviewBuilder.addTarget(mMediaRecorderSurface);
}
mCameraDevice.createCaptureSession(surfaces,...,...); 这段代码,是把预览的surface和录像的surface都设进去,然后去创建session
就是表示我预览和录像都需要拿到camera数据。
假设我预览设置的size是1080 x 720,录像是1080p的,那这个1080 x 720预览+1080p录像
就是一个usecase(用例)
其它类推。
UsecaseId:\chi-cdk\core\chiutils\chxdefs.h
/// @brief Usecase identifying enums
enum class UsecaseId
{
NoMatch = 0,
Default = 1,
Preview = 2,
PreviewZSL = 3,
MFNR = 4,
MFSR = 5,
MultiCamera = 6,
QuadCFA = 7,
RawJPEG = 8,
MultiCameraVR = 9,
Torch = 10,
YUVInBlobOut = 11,
VideoLiveShot = 12,
SuperSlowMotionFRC = 13,
Feature2 = 14,
Depth = 15,
AON = 16,
MaxUsecases = 17,
};chi-cdk/oem/qcom/topology/titan/fillmore/fillmore_usecase.xml
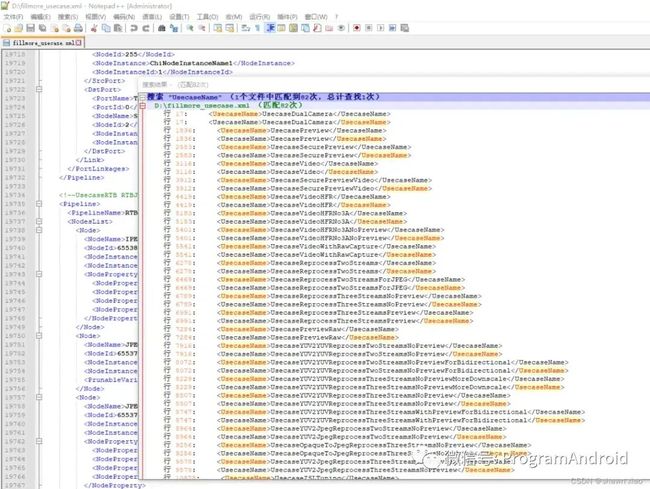
这个 xml 文件里面描述了 82 个 usecase,但是我们的相机不一定全部跑了这些 usecase,
这些 xml 描述的只是配置,描述的 uscase 是否实现了,还要看代码里面是否实现,并使能了这些 usecase。
比如我们常接触到的有 UsecaseTorch,UsecasePreview , UsecaseVideo, UsecaseSnapshot, UsecaseZSL, UsecaseQuadCFA,UsecaseRTB,UsecaseSAT 等
选择UsecaseId
不同的UsecaseId分别对应的不同的"使用案例",
该阶段是通过调用UsecaseSelector::GetMatchingUsecase()方法来实现的,
该函数中通过传入的operation_mode、num_streams配置数据流、数量以及当前使用的Sensor个数来选择相应的UsecaseId,
比如当numPhysicalCameras值大于1,同时配置的数据流数量num_streams大于1时,选择的就是UsecaseId::MultiCamera,表示当前采用的是双摄场景。
chi-cdk\core\chiusecase\Chxusecaseutils.cpp
UsecaseId UsecaseSelector::GetMatchingUsecase(
const LogicalCameraInfo* pCamInfo,
camera3_stream_configuration_t* pStreamConfig)
{
UsecaseId usecaseId = UsecaseId::Default; //第一行代码
......
CHX_LOG_INFO("usecase ID:%d",usecaseId);
return usecaseId; //最后一行代码
}chi-cdk\core\chiframework\Chxextensionmodule.h
UsecaseSelector* m_pUsecaseSelector; ///< Usecase selector
UsecaseFactory* m_pUsecaseFactory; ///< Usecase factory
Usecase* m_pSelectedUsecase[MaxNumImageSensors]; ///< Selected usecase创建Usecase:
根据之前选择的UsecaseId,通过UsecaseFactory来创建相应的Usecase,
Class Usecase是所有Usecase的基类,其中定义并实现了一些通用接口,
CameraUsecaseBase继承于Usecase,并扩展了部分功能。
AdvancedCameraUsecase又继承于CameraUsecaseBase,作为主要负责大部分场景的Usecase实现类,
另外对于多摄场景,现提供了继承于AdvancedCameraUsecase的UsecaseMultiCamera来负责实现。
在这段代码中可以看到,除了双摄场景,其它大部分场景使用的都是AdvancedCameraUsecase类来创建Usecase的
chi-cdk\core\chiframework\Chxextensionmodule.cpp
CDKResult ExtensionModule::InitializeOverrideSession(
uint32_t logicalCameraId,
const camera3_device_t* pCamera3Device,
const chi_hal_ops_t* chiHalOps,
camera3_stream_configuration_t* pStreamConfig,
int* pIsOverrideEnabled,
VOID** pPrivate)
{
...
selectedUsecaseId = m_pUsecaseSelector->GetMatchingUsecase(&m_logicalCameraInfo[logicalCameraId],
pStreamConfig);
...
m_pSelectedUsecase[logicalCameraId] =
m_pUsecaseFactory->CreateUsecaseObject(&m_logicalCameraInfo[logicalCameraId],
selectedUsecaseId, m_pStreamConfig[logicalCameraId],
m_multiCameraResources.hDescriptorConfig);
}chi-cdk\core\chiusecase\Chxusecaseutils.cpp
Usecase* UsecaseFactory::CreateUsecaseObject(
LogicalCameraInfo* pLogicalCameraInfo, ///< camera info
UsecaseId usecaseId, ///< Usecase Id
camera3_stream_configuration_t* pStreamConfig, ///< Stream config
ChiMcxConfigHandle hDescriptorConfig) ///< mcx config
{
Usecase* pUsecase = NULL;
UINT camera0Id = pLogicalCameraInfo->ppDeviceInfo[0]->cameraId;
switch (usecaseId)
{
case UsecaseId::PreviewZSL:
case UsecaseId::VideoLiveShot:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
case UsecaseId::MultiCamera:
if ((LogicalCameraType::LogicalCameraType_Default == pLogicalCameraInfo->logicalCameraType) &&
(pLogicalCameraInfo->numPhysicalCameras > 1))
{
pUsecase = ChiMulticameraBase::Create(pLogicalCameraInfo, pStreamConfig, hDescriptorConfig);
}
break;
case UsecaseId::MultiCameraVR:
//pUsecase = UsecaseMultiVRCamera::Create(pLogicalCameraInfo, pStreamConfig);
break;
case UsecaseId::QuadCFA:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
case UsecaseId::Torch:
pUsecase = UsecaseTorch::Create(pLogicalCameraInfo, pStreamConfig);
break;
case UsecaseId::Depth:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
case UsecaseId::AON:
pUsecase = CHXUsecaseAON::Create(pLogicalCameraInfo);
break;
default:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
}
return pUsecase;
}在AdvancedCameraUsecase::Create方法中做了很多初始化操作,其中包括了以下几个阶段:
获取XML文件中Usecase配置信息
创建Feature
保存数据流,重建Usecase的配置信息
调用父类CameraUsecaseBase的initialize方法,进行一些常规初始化工作
Chi-cdk\core\chiusecase\Chxadvancedcamerausecase.cpp
获取XML文件中Usecase配置信息
这一部分主要通过调用CameraUsecaseBase::GetXMLUsecaseByName方法进行实现。
该方法的主要操作是从PerNumTargetUsecases数组中找到匹配到给定的usecaseName的Usecase,并作为返回值返回给调用者,
在函数中会与默认传入的"UsecaseZSL"进行比较,更新并返回pUsecase
PerNumTargetUsecases的定义是在g_pipeline.h中,该文件是在编译过程中通过 \chi-cdk\tools\usecaseconverter\usecaseconverter.pl 脚本将定义在个平台目录下的common_usecase.xml中的内容转换生成g_pipeline.h。
/// AdvancedCameraUsecase::Create
AdvancedCameraUsecase* AdvancedCameraUsecase::Create(
LogicalCameraInfo* pCameraInfo, ///< Camera info
camera3_stream_configuration_t* pStreamConfig, ///< Stream configuration
UsecaseId usecaseId) ///< Identifier for usecase function
{
AdvancedCameraUsecase* pAdvancedCameraUsecase = CHX_NEW AdvancedCameraUsecase;
if ((NULL != pAdvancedCameraUsecase) && (NULL != pStreamConfig))
{
result = pAdvancedCameraUsecase->Initialize(pCameraInfo, pStreamConfig, usecaseId);
}
return pAdvancedCameraUsecase;
}
/// AdvancedCameraUsecase::Initialize
/// 这个函数后面会反复查看
static const CHAR* ZSL_USECASE_NAME = "UsecaseZSL";
CDKResult AdvancedCameraUsecase::Initialize(
LogicalCameraInfo* pCameraInfo, ///< Camera info
camera3_stream_configuration_t* pStreamConfig, ///< Stream configuration
UsecaseId usecaseId) ///< Identifier for the usecase function
{
...
m_pAdvancedUsecase = GetXMLUsecaseByName(ZSL_USECASE_NAME);
...
if (CDKResultSuccess == result)
{
if ((UsecaseId::PreviewZSL == m_usecaseId) ||
(UsecaseId::YUVInBlobOut == m_usecaseId) ||
(UsecaseId::VideoLiveShot == m_usecaseId) ||
(UsecaseId::QuadCFA == m_usecaseId) ||
(UsecaseId::RawJPEG == m_usecaseId) ||
(UsecaseId::Feature2 == m_usecaseId) ||
(UsecaseId::MultiCamera == m_usecaseId))
{
SelectFeatures(pStreamConfig);
}
result = SelectUsecaseConfig(pCameraInfo, pStreamConfig);
}
...
}
/// CameraUsecaseBase::GetXMLUsecaseByName
/// @brief Collection of usecases with matching properties (target count at this point)
struct ChiTargetUsecases
{
UINT numUsecases; ///< The number of Usecases in this collection
ChiUsecase* pChiUsecases; ///< An array of Usecases of size numUsecases
};
ChiUsecase* CameraUsecaseBase::GetXMLUsecaseByName(const CHAR* usecaseName)
{
ChiUsecase* pUsecase = NULL;
UINT32 numTargets = 0;
CHX_LOG("E. usecaseName:%s", usecaseName);
struct ChiTargetUsecases* pPerNumTargetUsecases = UsecaseSelector::GetValueFromUsecasepChiTargetUsecases().at(
"PerNumTargetUsecases");
numTargets = UsecaseSelector::GetValueFromUsecaseEnum().at("PerNumTargetUsecasesSize");
for (UINT32 i = 0; i < numTargets; i++)
{
if (0 < pPerNumTargetUsecases[i].numUsecases)
{
ChiUsecase* pUsecasePerTarget = pPerNumTargetUsecases[i].pChiUsecases;
for (UINT32 index = 0; index < pPerNumTargetUsecases[i].numUsecases; index++)
{
if (0 == strcmp(usecaseName, pUsecasePerTarget[index].pUsecaseName))
{
//传入的默认"UsecaseZSL"和挑选出来的不一致,就用挑选出来的
pUsecase = &pUsecasePerTarget[index];
break;
}
}
}
}
CHX_LOG("pUsecase:%p", pUsecase);
return pUsecase;
}UseCase在camx中很有很多衍生类,这是camx针对不同的stream来建立不同的usecase对象,用来管理选择feature,并且创建 pipeline以及session。

3.2 Feature
Feature 代表一个特定的功能。
高通CameraHAL3的 feature 有HDR(高动态范围)、SuperNight(超级夜景)、MFNR(多帧降噪)等等。
Usecase选择相应的feature,然后关联一组pipeline,上层下发request请求,hal层会根据request去选择对应的feature。

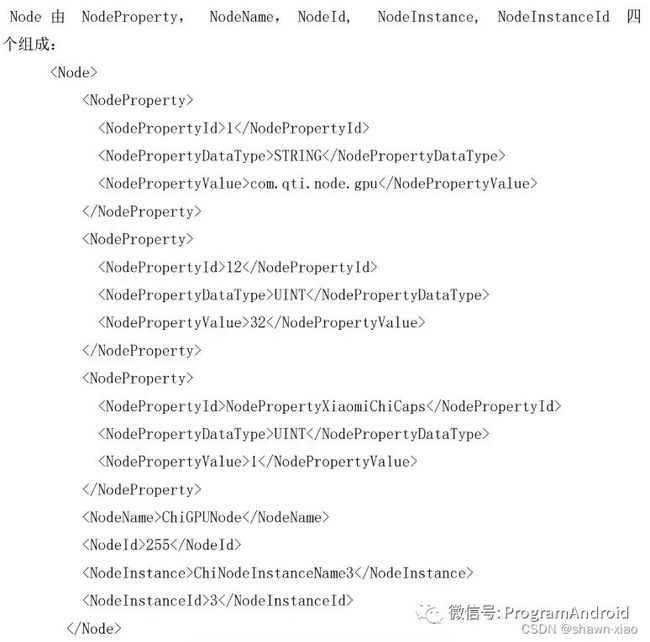
3.3 Node
Node是单个具有独立处理功能的抽象模块,可以是软件单元也可以是硬件单元。
Node是camx中非常重要的一个父类,是处理camera 请求的一个中间节点,用于处理pipeline下发的请求。
Node结构:
创建Node流程:
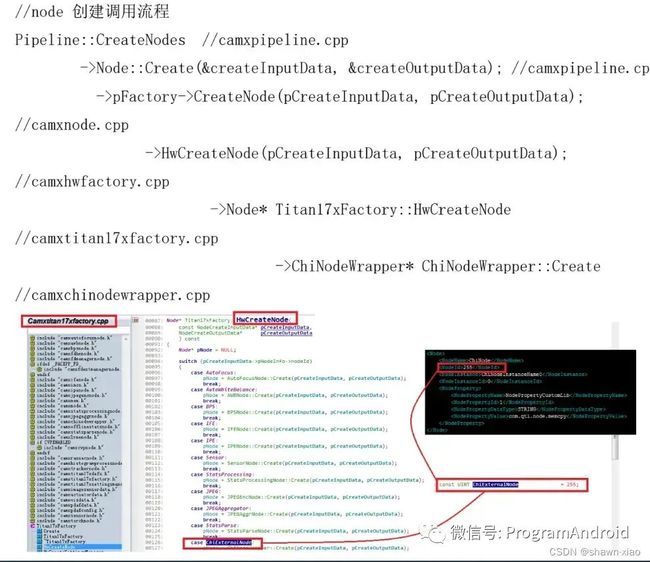
Node 节点在camx chi架构中至关重要,数据的处理都是通过封装好的Node节点来进行的。

Node初始化流程:
3.4 Pipeline
一连串node的集合。pipeline提供单一特定功能的所有资源集合,维护着所有硬件资源以及数据的流转。
3.5 Session
若干个有关联的pipeline的集合,用于管理pipeline的抽象控制单元,其中至少包含一个pipeline,并控制着所有的硬件资源,管控着每个pipeline内部的request流转以及数据的输入输出。
3.6 Link
定义不同的Port的连接端口(输入端口和输出端口)
3.7 Port
作为Node的输入输出端口,使用SrcPort以及DstPort结构定义XML文件。

3.8 Topologies
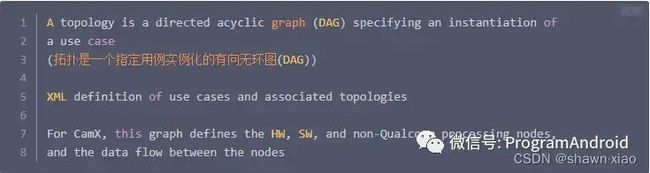
有向无环图
3.9 常用Usecase、Pipeline及其对应关系
Camx、Chi-Cdk做成组件化的目的在于:

不同机型、产品性能及定位不同,即使基线一样usecase等也有可能不一样
给了手机厂商极大的自定义空间,UseCase可以场景复用,对应的pipeline也可以不用或复用
常用Usecase、Pipeline的对应关系:
四.组件之间的关系
4.1 基本组件之间的关系:
上层根据需求,config对应的stream下来
下面会根据申请的stream来选择对应的usecase
usecase选择完成后,又会去选择需要的feature
不同的feature会去关联对应的pipeline
pipeline是由一系列node组成的
最终上层config的stream,就会交由各个node去处理
组件关系图:
目前高通Camera HAL3的架构已逐步改为以Feature为中心,摒弃之前Usecase为中心的架构模式

五.基础组件与上层交互
5.1 Camera App整体渲染流程以及与CAMX交互流程图:
图1:

图2:

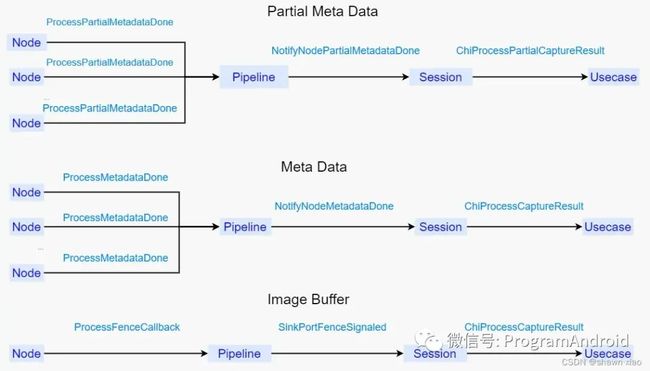
5.2 Request流转
上层由Session下发的每一个Request对应了三个Result:
partial metadata
metadata
image data
对于每一个Result,上传过程可以大致分为以下两个阶段:
Session内部完成图像数据的处理,将结果发送至Usecase中
Usecase接收到来自Session的数据,并将其上传至Provider
5.3 Session回调函数在CAMX的体现
5.3.1 Session::StreamOn()
该方法主要用于开始硬件的数据输出
具体点儿就是进行配置Sensor寄存器,让其开始出图,并且将当前的Session的状态告知每一Node,让它们在自己内部也做好处理数据的准备,所以之后的相关Request的流转都是以该方法为前提进行的,所以该方法重要性可见一斑。
Session的StreamOn方法中主要做了如下两个工作:
调用FinalizeDeferPipeline()方法
如果当前pipeline并未初始化,则会调用pipeline的FinalizePipeline()方法,这里方法里面会去针对每一个从属于当前pipeline的Node依次做FinalizeInitialization、CreateBufferManager、NotifyPipelineCreated以及PrepareNodeStreamOn操作
FinalizeInitialization用于完成Node的初始化动作,NotifyPipelineCreated用于通知Node当前Pipeline的状态,此时Node内部可以根据自身的需要作相应的操作,
PrepareNodeStreamOn()方法的主要是完成Sensor以及IFE等Node的控制硬件模块出图前的配置,其中包括了曝光的参数的设置
CreateBufferManagers()方法涉及到CAMX CHI-CDK中的一个非常重要的Buffer管理机制,用于Node的ImageBufferManager的创建,而该类用于管理Node中的output port的buffer申请/流转/释放等操作。
调用Pipeline的StreamOn()方法
这个方法里面会进一步通知CSL部分开启数据流,并且调用每一个Node的OnNodeStreamOn()方法,该方法会去调用ImageBufferManager的Activate(),该方法里面会去真正分配用于装载图像数据的buffer,之后会去调用CHI部分实现的用户自定义的Nod的pOnStreamOn()方法,用户可以在该方法中做一些自定义的操作。
5.3.2 Session::ProcessCaptureRequest()
针对每一次的Request的流转,都是以该方法为入口开始的,具体流程见下图:

Pipeline首次针对每一个Node通过调用AddDeferredNode方法加入到DRQ中
此时所有的Node都会加入到m_readyNodes中,然后通过调用dispatchReadyNodes方法,触发DRQ开始进行整个内部处理流程
基本流程可以参见下图:

Session内部完成图像数据的处理后是如何将结果发送至Usecase的:
Usecase接收到Session的数据,是如何发送至Provider的,
以常用的AdvancedCameraUsecase为例进行代码的梳理:

六.日志TAG:
6.1 摄像头驱动上电:
driver上电日志:cam_sensor_driver_cmd | Probe success
6.2 摄像头驱动下电:
driver下电日志:
cam_sensor_driver_cmd: CAM_STOP_DEV Success for productname_ofilm_s5khm2_wide sensor_id:0x1ad2,sensor_slave_addr:0x20
cam_sensor_driver_cmd: CAM_RELEASE_DEV Success for productname_ofilm_s5khm2_wide sensor_id:0x1ad2, slave_addr:0x20
6.3 打开摄像头开始传第一帧之前:
CAM_START_DEV
6.4 底层遍历摄像头:
CHIUSECASE: [INFO ] chifeature2graphselector.cpp:11256 BuildCameraIdSet() cameraId 4, set 54
CHIUSECASE: [INFO ] chifeature2graphselector.cpp:11256 BuildCameraIdSet() cameraId 0, set 50
CHIUSECASE: [INFO ] chifeature2graphselector.cpp:11256 BuildCameraIdSet() cameraId 1, set 50
CHIUSECASE: [INFO ] chifeature2graphselector.cpp:11256 BuildCameraIdSet() cameraId 2, set 50
CHIUSECASE: [INFO ] chifeature2graphselector.cpp:11256 BuildCameraIdSet() cameraId 3, set 50
6.5 打开相机:
CameraService: CameraService::connect|first frame arrived|CameraService: disconnect: Disconnected|CAM_ACQUIRE_DEV|CAM_START_DEV|CAM_STOP_DEV|CAM_RELEASE_DEV
"configure_streams":配置流
"pipelineName":pipeline名称
CAMX :|CHIUSECASE:|STREAM_ONSelectFeatureGraphforRequestFromTable|Node::|CamX:|CHIUSECASE:|Camera3|CameraDevice
七.其他
7.1 定义pipeline中node的xml地址:
vendor/qcom/proprietary/chi-cdk/oem/qcom/topology/titan/usecase-components/usecases/UsecaseZSL/pipelines
7.2 Node链接方式定义:
Pipeline中的Node以及连接方式都在XML中被定义,其主要包含了以下几个标签定义:
PipelineName: 用来定义该条Pipeline的名称
NodeList: 该标签中定义了该条Pipeline的所有的Node
PortLinkages: 该标签定义了Node上不同端口之间的连接关系
7.3 vendortag定义文件:
/vendor/qcom/proprietary/chi-cdk/api/common/chioemvendortagdefines.h
7.4 sensor驱动目录:
某项目名为productname,其一颗摄像头的驱动文件目录:
vendor\qcom\proprietary\chi-cdk\oem\qcom\sensor\productname_sensor\productname_ofilm_ov16a1q_front_sensor
原文链接:https://blog.csdn.net/geyichongchujianghu/article/details/131029549
参考文献:
【腾讯文档】Camera学习知识库
https://docs.qq.com/doc/DSWZ6dUlNemtUWndv
至此,本篇已结束。转载网络的文章,小编觉得很优秀,欢迎点击阅读原文,支持原创作者,如有侵权,恳请联系小编删除,欢迎您的建议与指正。同时期待您的关注,感谢您的阅读,谢谢!

点击阅读原文,为大佬点赞!