基于海康SDK实现Python调用海康威视网络摄像头
基于海康SDK实现Python调用海康威视网络摄像头
- 1. 原料准备
- 2. 环境配置
-
- 2.1. opencv环境配置
- 2.2. Swig环境变量配置
- 3. 编译和运行
-
- 3.1. Step1
- 3.2. Step2
- 3.3. Step3
- 3.4. Step4
- 3.5. Step5
本文参考博客,写得很好:
- Python调用海康威视网络相机之——python调用海康威视C++的SDK
- Python调用海康威视网络相机C++的SDK
写本文的目的,也是快速复盘,所以没有很详细
保存视频流到本地可参考下一篇:基于海康SDK实现Python保存海康威视网络摄像头拍摄的视频
1. 原料准备
- Windows11
- Visual Studio 2015 或 Visual Studio 2013
- Anaconda3 或 Miniconda3(配置基于conda的Python 3.7.xx 的虚拟环境)
- Miniconda3下载链接:
https://docs.conda.io/projects/miniconda/en/latest/
- Miniconda3下载链接:
- opencv-3.4.16-vc14_vc15_for_Windows
- opencv下载链接:
https://opencv.org/releases/
- opencv下载链接:
- swigwin-3.0.12
- Swig_Windows版本下载地址:
https://sourceforge.net/projects/swig/files/swigwin/
- Swig_Windows版本下载地址:
- OpenCV-swig接口文件
- 下载地址:
https://github.com/renatoGarcia/opencv-swig
- 下载地址:
- boost_1_70_0
- Boost下载地址:
https://www.boost.org/users/history/
- Boost下载地址:
- 海康威视网络摄像头
- 海康SDK版本:CH-HCNetSDKV6.1.9.48_build20230410_win64
- 海康SDK下载地址:
https://open.hikvision.com/download/5cda567cf47ae80dd41a54b3?type=10
- 海康SDK下载地址:
2. 环境配置
- Visual Studio 2015 或 Visual Studio 2013 安装:略
- Anaconda3 或 Miniconda3配置Python虚拟环境:略
2.1. opencv环境配置
- opencv安装配置:可参考:Windows下 OpenCV 的下载安装教程(详细)
- 可能需要注意的,关于visual studio和vc版本之间的对应关系:关于visual studio和vc版本之间的对应关系(更新至2020.07)
vc14 对应 VS2015
vc15 对应 VS2017
但实际上用VS2013好像也可以 - 我这里安装的是opencv-3.4.16-vc14_vc15_for_Windows,参考上面的文章,我的
用户变量和系统变量的路径配置为:D:\DeveloperTools\OpenCV\opencv\build\x64\vc14\bin
2.2. Swig环境变量配置
- 可参考:SWIG:SWIG的简介、安装、使用方法之详细攻略
- 我这里安装的是swigwin-3.0.12,我的
系统变量的路径配置为:D:\DeveloperTools\SWIG\swigwin-3.0.12
3. 编译和运行
- 为方便,不用安装和配置环境变量的文件全都放到了
D:\CYT\Desktop\HKSDK\文件夹下
3.1. Step1
- 在
D:\CYT\Desktop\HKSDK\文件夹下创建HicVision_python_SDK文件夹 - 创建3个文本文件,并修改名称和文件后缀为
HKIPcamera.h、HKIPcamera.cpp、HKIPcamera.i - 上面3个文件的内容如下:
HKIPcamera.h
#includeusing namespace cv; void init(char* ip, char* usr, char* password); Mat getframe(); void release(); HKIPcamera.cpp
#include#include #include #include #include #include #include "HCNetSDK.h" #include "plaympeg4.h" #define USECOLOR 1 using namespace cv; using namespace std; //-------------------------------------------- int iPicNum = 0;//Set channel NO. LONG nPort = -1; HWND hWnd = NULL; CRITICAL_SECTION g_cs_frameList; list g_frameList; LONG lUserID; NET_DVR_DEVICEINFO_V30 struDeviceInfo; HANDLE hThread; LONG lRealPlayHandle = -1; void yv12toYUV(char *outYuv, char *inYv12, int width, int height, int widthStep) { int col, row; unsigned int Y, U, V; int tmp; int idx; for (row = 0; row < height; row++) { idx = row * widthStep; int rowptr = row * width; for (col = 0; col < width; col++) { tmp = (row / 2)*(width / 2) + (col / 2); Y = (unsigned int)inYv12[row*width + col]; U = (unsigned int)inYv12[width*height + width * height / 4 + tmp]; V = (unsigned int)inYv12[width*height + tmp]; outYuv[idx + col * 3] = Y; outYuv[idx + col * 3 + 1] = U; outYuv[idx + col * 3 + 2] = V; } } } //解码回调 视频为YUV数据(YV12),音频为PCM数据 void CALLBACK DecCBFun(long nPort, char * pBuf, long nSize, FRAME_INFO * pFrameInfo, long nReserved1, long nReserved2) { long lFrameType = pFrameInfo->nType; if (lFrameType == T_YV12) { #if USECOLOR //int start = clock(); static IplImage* pImgYCrCb = cvCreateImage(cvSize(pFrameInfo->nWidth, pFrameInfo->nHeight), 8, 3);//得到图像的Y分量 yv12toYUV(pImgYCrCb->imageData, pBuf, pFrameInfo->nWidth, pFrameInfo->nHeight, pImgYCrCb->widthStep);//得到全部RGB图像 static IplImage* pImg = cvCreateImage(cvSize(pFrameInfo->nWidth, pFrameInfo->nHeight), 8, 3); cvCvtColor(pImgYCrCb, pImg, CV_YCrCb2RGB); //int end = clock(); #else static IplImage* pImg = cvCreateImage(cvSize(pFrameInfo->nWidth, pFrameInfo->nHeight), 8, 1); memcpy(pImg->imageData, pBuf, pFrameInfo->nWidth*pFrameInfo->nHeight); #endif EnterCriticalSection(&g_cs_frameList); //g_frameList.push_back(pImg); g_frameList.push_back(cv::cvarrToMat(pImg)); LeaveCriticalSection(&g_cs_frameList); } } ///实时流回调 void CALLBACK fRealDataCallBack(LONG lRealHandle, DWORD dwDataType, BYTE *pBuffer, DWORD dwBufSize, void *pUser) { DWORD dRet; switch (dwDataType) { case NET_DVR_SYSHEAD: //系统头 if (!PlayM4_GetPort(&nPort)) //获取播放库未使用的通道号 { break; } if (dwBufSize > 0) { if (!PlayM4_OpenStream(nPort, pBuffer, dwBufSize, 1024 * 1024)) { dRet = PlayM4_GetLastError(nPort); break; } //设置解码回调函数 只解码不显示 if (!PlayM4_SetDecCallBack(nPort, DecCBFun)) { dRet = PlayM4_GetLastError(nPort); break; } //打开视频解码 if (!PlayM4_Play(nPort, hWnd)) { dRet = PlayM4_GetLastError(nPort); break; } } break; case NET_DVR_STREAMDATA: //码流数据 if (dwBufSize > 0 && nPort != -1) { BOOL inData = PlayM4_InputData(nPort, pBuffer, dwBufSize); while (!inData) { Sleep(10); inData = PlayM4_InputData(nPort, pBuffer, dwBufSize); OutputDebugString(L"PlayM4_InputData failed \n"); } } break; } } void CALLBACK g_ExceptionCallBack(DWORD dwType, LONG lUserID, LONG lHandle, void *pUser) { char tempbuf[256] = { 0 }; switch (dwType) { case EXCEPTION_RECONNECT: //预览时重连 printf("----------reconnect--------%d\n", time(NULL)); break; default: break; } } bool OpenCamera(char* ip, char* usr, char* password) { lUserID = NET_DVR_Login_V30(ip, 8000, usr, password, &struDeviceInfo); if (lUserID == 0) { cout << "Log in success!" << endl; return TRUE; } else { printf("Login error, %d\n", NET_DVR_GetLastError()); NET_DVR_Cleanup(); return FALSE; } } DWORD WINAPI ReadCamera(LPVOID IpParameter) { //--------------------------------------- //设置异常消息回调函数 NET_DVR_SetExceptionCallBack_V30(0, NULL, g_ExceptionCallBack, NULL); //cvNamedWindow("Mywindow", 0); //cvNamedWindow("IPCamera", 0); //HWND h = (HWND)cvGetWindowHandle("Mywindow"); //h = cvNamedWindow("IPCamera"); //--------------------------------------- //启动预览并设置回调数据流 NET_DVR_CLIENTINFO ClientInfo; ClientInfo.lChannel = 1; //Channel number 设备通道号 ClientInfo.hPlayWnd = NULL; //窗口为空,设备SDK不解码只取流 ClientInfo.lLinkMode = 1; //Main Stream ClientInfo.sMultiCastIP = NULL; LONG lRealPlayHandle; lRealPlayHandle = NET_DVR_RealPlay_V30(lUserID, &ClientInfo, fRealDataCallBack, NULL, TRUE); if (lRealPlayHandle < 0) { printf("NET_DVR_RealPlay_V30 failed! Error number: %d\n", NET_DVR_GetLastError()); return -1; } else cout << "码流回调成功!" << endl; Sleep(-1); if (!NET_DVR_StopRealPlay(lRealPlayHandle)) { printf("NET_DVR_StopRealPlay error! Error number: %d\n", NET_DVR_GetLastError()); return 0; } NET_DVR_Logout(lUserID); NET_DVR_Cleanup(); return 0; } void init(char* ip, char* usr, char* password) { //HANDLE hThread; //LPDWORD threadID; //--------------------------------------- // 初始化 NET_DVR_Init(); //设置连接时间与重连时间 NET_DVR_SetConnectTime(2000, 1); NET_DVR_SetReconnect(10000, true); OpenCamera(ip, usr, password); InitializeCriticalSection(&g_cs_frameList); hThread = ::CreateThread(NULL, 0, ReadCamera, NULL, 0, 0); } Mat getframe() { Mat frame1; EnterCriticalSection(&g_cs_frameList); while (!g_frameList.size()) { LeaveCriticalSection(&g_cs_frameList); EnterCriticalSection(&g_cs_frameList); } list ::iterator it; it = g_frameList.end(); it--; Mat dbgframe = (*(it)); (*g_frameList.begin()).copyTo(frame1); frame1 = dbgframe; g_frameList.pop_front(); //imshow("camera", frame1); //waitKey(1); g_frameList.clear(); // 丢掉旧的帧 LeaveCriticalSection(&g_cs_frameList); return(frame1); } void release() { ::CloseHandle(hThread); NET_DVR_StopRealPlay(lRealPlayHandle); //关闭预览 NET_DVR_Logout(lUserID); //注销用户 NET_DVR_Cleanup(); } HKIPcamera.i
/* Example of wrapping a C function that takes a C double array as input using * numpy typemaps for SWIG. */ %module HKIPcamera %include%cv_mat__instantiate_defaults %header %{ /* Includes the header in the wrapper code */ #include "HKIPcamera.h" %} %include "HKIPcamera.h"
3.2. Step2
- 将之前下载的
opencv-swig-master中的lib\目录下的opencv\文件夹和opencv.i复制到自己创建的HicVision_python_SDK\文件夹下。 - 将解压的
boost_1_70_0文件夹也一并复制到HicVision_python_SDK\文件夹下。 - 将安装后的Opencv路径下的
.\opencv\build\include\opencv2\文件夹也复制到HicVision_python_SDK\文件夹下。 - 打开CMD终端,移动到
HicVision_python_SDK\文件夹,执行如下命令:swig -IE:你的opencv安装路径 -python -c++ HKIPcamera.i # 根据自己opencv安装路径来写,例如我的命令如下: swig -IE:D:/DeveloperTools/OpenCV/opencv/build/include -python -c++ HKIPcamera.i - 执行完命令后,会生成
HKIPcamera_wrap.cxx和HKIPcamera.py两个文件。 - 这里使用的海康SDK版本为:
CH-HCNetSDKV6.1.9.48_build20230410_win64,如果是此本版以前的版本,可能会需要修改SDK中的plaympeg4.h文件,可参考文章最开头给出的参考文章。
3.3. Step3
- 由于对
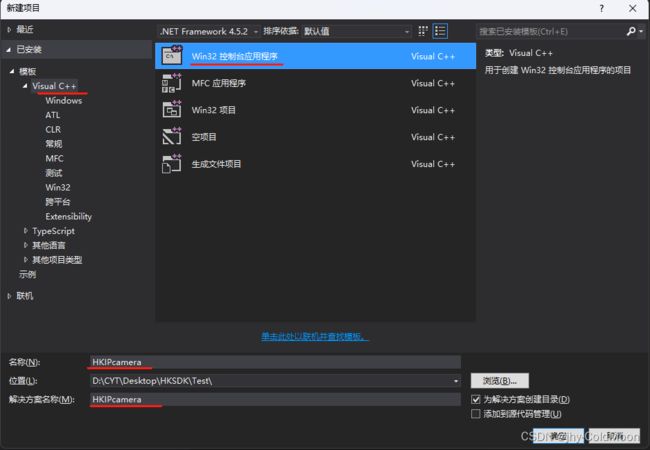
VisualStudio这个软件用的少,所以下面步骤详细点,这里用的是VisualStudio2015
- 创建项目



- 添加头文件和源文件,添加的文件就在之前创建的
HicVision_python_SDK\文件夹下


- 源文件同样这样添加,添加后的样子

- 参数设置


- 在
VC++目录->包含目录中添加如下头文件路径:(请根据自己的实际安装位置填写)# 我的路径如下: D:\DeveloperTools\Miniconda3\envs\HKSDK\include D:\DeveloperTools\Miniconda3\envs\HKSDK\Lib\site-packages\numpy\core\include D:\CYT\Desktop\HKSDK\HicVision_python_SDK\boost_1_70_0 D:\CYT\Desktop\HKSDK\CH-HCNetSDKV6.1.9.48_build20230410_win64\include D:\DeveloperTools\OpenCV\opencv\build\include\opencv2 D:\DeveloperTools\OpenCV\opencv\build\include\opencv D:\DeveloperTools\OpenCV\opencv\build\include - 在
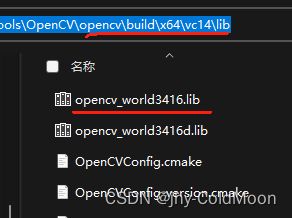
VC++目录->库目录中添加如下头文件路径:(请根据自己的实际安装位置填写)# 我的路径如下: D:\DeveloperTools\Miniconda3\envs\HKSDK\libs D:\CYT\Desktop\HKSDK\HicVision_python_SDK\boost_1_70_0\libs D:\CYT\Desktop\HKSDK\CH-HCNetSDKV6.1.9.48_build20230410_win64\lib D:\CYT\Desktop\HKSDK\CH-HCNetSDKV6.1.9.48_build20230410_win64\lib\HCNetSDKCom D:\DeveloperTools\OpenCV\opencv\build\x64\vc14\lib - 在
C/C++->预处理器->预处理器定义中添加如下内容:WIN32 NDEBUG _CONSULE _CRT_SECURE_NO_WARNINGS - 在
链接器->输入->附加依赖项添加如下内容:opencv_world3416.lib # 这里一定要根据自己的opencv版本来写 HCNetSDK.lib GdiPlus.lib HCAlarm.lib HCCore.lib HCGeneralCfgMgr.lib HCPreview.lib PlayCtrl.lib
- 在
常规->字符集中选择使用多字节字符集 - 在
C/C++->代码生成中选择多线程DLL(/MD)
- 在自己的python3.7中的
include\文件夹下- 我这里的python3.7虚拟环境路径为:
D:\DeveloperTools\Miniconda3\envs\HKSDK\include\ - 将
object.h中的第56行注释掉(以自己实际的行数为准)

- 我这里的python3.7虚拟环境路径为:
- 将
pyconfig.h中的第317~319行注释掉(以自己实际的行数为准)

3.4. Step4
-
完成以上步骤后,右键工程项目名选择生成


- 之后会在工程的
x64\Release\文件夹下生成.dll和.lib文件

- 之后会在工程的
-
现在,可以将之前python3.7中的
include\文件夹下的object.h和pyconfig.h中注释掉的行数恢复原样(不恢复貌似也没问题) -
将
.\HKIPcamera\x64\Release\下生成的HKIPcamera.dll文件复制一份,并将文件名称和后缀名修改为_HKIPcamera.pyd -
将海康SDK中的
.\CH-HCNetSDKV6.1.9.48_build20230410_win64\lib\文件夹下的所有文件和文件夹拷贝到.\HKIPcamera\x64\Release\文件夹下 -
将之前在
.\HicVision_python_SDK下生成的HKIPcamera.py文件也拷贝到.\HKIPcamera\x64\Release\文件夹下- 最终文件组成如下(未显示完):
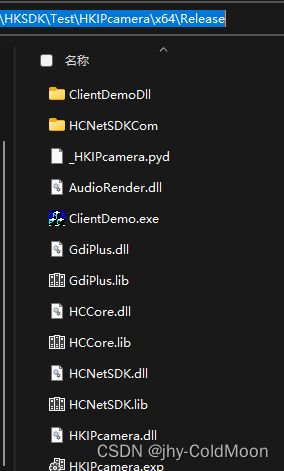
- 最终文件组成如下(未显示完):
-
将
_HKIPcamera.pyd文件,包含目录路径,添加到系统环境变量Path中,并将_HKIPcamera.pyd所在文件夹目录,也添加到系统环境变量目录中

3.5. Step5
- 测试,导包测试,主要是看是否能够导入
HKIPcamera包,没有报错,就是成功了import HKIPcamera import time import numpy as np import matplotlib.pyplot as plt import cv2 - 将上面
.\HKIPcamera\x64\Release\中的文件和文件夹全部复制一份到.\CH-HCNetSDKV6.1.9.48_build20230410_win64\Demo\5_Python_Demo\1-预览取流解码Demo\lib\win\目录下 - 运行海康SDK中的
CH-HCNetSDKV6.1.9.48_build20230410_win64_20230905143859.zip\CH-HCNetSDKV6.1.9.48_build20230410_win64\Demo示例\5- Python开发示例\1-预览取流解码Demo\test_main.py,测试可行

到底了