22、STM32——SPI
1、SPI 简介
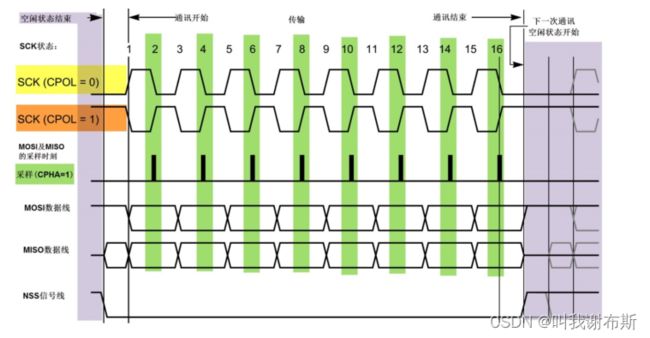
SPI 一般有四根通信线,一根时钟线(SCLK)用来从主设备发出时钟脉冲,两根单向数据线(MOSI,MISO)实现全双工通信,一根片选信号由主设备发出,作为从设备的使能信号。
SPI 通信是以主设备发起字节开始的,即便主设备只需要读取从设备发出的数据,也需要先发送字节开启通信的传输。主设备和从设备中各有一个移位寄存器,主设备把要发送的数据写入寄存器,寄存器再通过 MOSI 信号线将数据发送给从设备,与此同时,从设备的数据也从 MISO 信号线传输给主设备。
时钟极性:CPOL = 0 串行同步时钟的空闲状态为低电平,CPOL = 1 串行同步时钟的空闲状态为高电平。
时钟相位:CPHA = 0 串行同步时钟的第一个(奇数个)跳变沿数据被采样,CPHA = 1 串行同步时钟的第二个(偶数个)跳变沿数据被采样
当发送完一帧数据的时候,“状态寄存器 SR” 中的 “TXE 标志位” 会被置 1,表示传输完一帧,发送缓冲区已空
当接收完一帧数据的时候,“RXNE 标志位” 会被置 1,表示传输完一帧,接收缓冲区非空
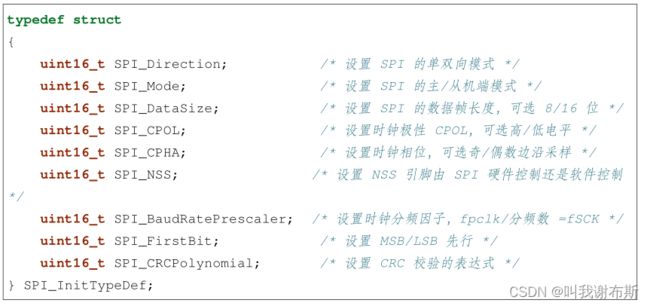
(1) SPI_Direction
设置 SPI 的通讯方向,可设置为双线全双工 (SPI_Direction_2Lines_FullDuplex),双线只接收 (SPI_Direction_2Lines_RxOnly),单线只接收 (SPI_Direction_1Line_Rx)、单线只发送模式
(SPI_Direction_1Line_Tx)
(2) SPI_Mode
设置 SPI 工作在 主机模式 (SPI_Mode_Master) 或 从机模式 (SPI_Mode_Slave ),这两个模式的最大区别为 SPI 的 SCK 信号线的时序,SCK 的时序是由通讯中的主机产生的。若被配置为从机模式,STM32 的 SPI 外设将接受外来的 SCK 信号
(3) SPI_DataSize
本成员可以选择 SPI 通讯的数据帧大小是为 8 位 (SPI_DataSize_8b) 还是 16 位 (SPI_DataSize_16b)。
(4) SPI_CPOL 和 SPI_CPHA
时钟极性 CPOL 成员,可设置为高电平 (SPI_CPOL_High) 或低电平 (SPI_CPOL_Low )
时钟相位 CPHA 则可以设置为 SPI_CPHA_1Edge(在 SCK 的奇数边沿采集数据) 或 SPI_CPHA_2Edge(在 SCK 的偶数边沿采集数据) 。
(5) SPI_NSS
配置 NSS 引脚的使用模式,可以选择为硬件模式 (SPI_NSS_Hard ) 与软件模式 (SPI_NSS_Soft ),在硬件模式中的 SPI 片选信号由 SPI 硬件自动产生,而软件模式则需要我们亲自把相应的 GPIO 端口拉高或置低产生非片选和片选信号。
实际中软件模式应用比较多。
(6) SPI_BaudRatePrescaler
本成员设置波特率分频因子,分频后的时钟即为 SPI 的 SCK 信号线的时钟频率。这个成员参数可设置为 fpclk 的 2、4、6、8、16、32、64、128、256 分频。
(7) SPI_FirstBit
所有串行的通讯协议都会有 MSB 先行 (高位数据在前) 还是 LSB 先行 (低位数据在前) 的问题,而 STM32 的 SPI 模块可以通过这个结构体成员,对这个特性编程控制。
(8) SPI_CRCPolynomial
这是 SPI 的 CRC 校验中的多项式,若我们使用 CRC 校验时,就使用这个成员的参数 (多项式),来计算 CRC 的值。
2、读写W25Q64
在存储控制上,主要的区别是 FLASH 芯片只能一大片一大片地擦写,而 EEPROM可以单个字节擦写。
64Mbit 也就是8MByte 的 flash内存,分成0 ~ 127个块,每个块 64KB,每个块分成 0 ~ 15 个扇区(sector),每个扇区 4KB。
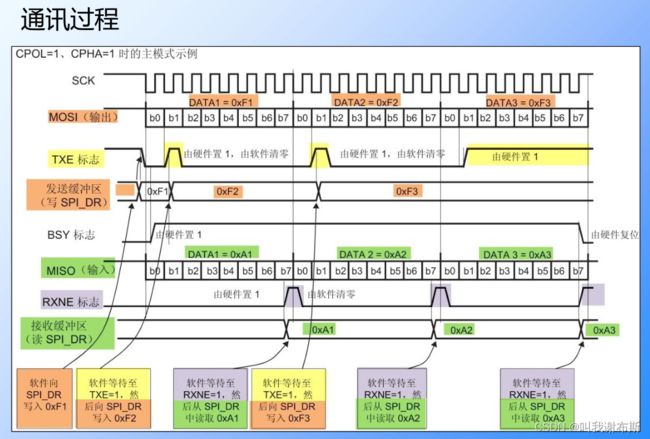
我们在发送数据的时候,要先确认发送缓冲区是否为空,确保上一个数据已经发送完成,当数据全部从数据寄存器(DR)的发送缓冲区传输到移位寄存器,TXE 标志置1,发送缓冲区为空,才可以向数据寄存器( DR )中写入数据。
同时,在接收数据的时候,要先确认接收缓冲区是否非空,当数据寄存器里有数据时,RXNE位是0,当数据全部从数据寄存器( DR )的接收缓冲区传输到移位寄存器时, RXNE 位被置1,这时候可以从数据寄存器( DR )里读出数据。
就算我们需要接收数据也应该先发送数据,发送数据可以产生时序来接收数据。
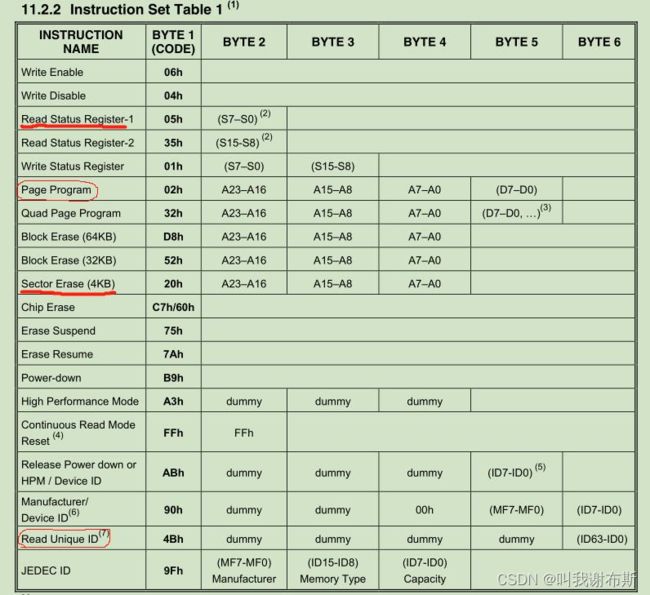
在拿到一块模块的时候,应该先写个示例程序判断模块的好坏,因此,通过读取 W25Q64 的 ID 来判断通讯情况。
#ifndef _BSP_SPI_H_
#define _BSP_SPI_H_
#include "stm32f10x.h"
#define SPI_CS_PORT GPIOA
#define SPI_CS_PIN GPIO_Pin_4
#define SPI_SCK_PORT GPIOA
#define SPI_SCK_PIN GPIO_Pin_5
#define SPI_MISO_PORT GPIOA
#define SPI_MISO_PIN GPIO_Pin_6
#define SPI_MOSI_PORT GPIOA
#define SPI_MOSI_PIN GPIO_Pin_7
#define SPI_FLASH_CS_LOW() GPIO_ResetBits(SPI_CS_PORT, SPI_CS_PIN )
#define SPI_FLASH_CS_HIGH() GPIO_SetBits(SPI_CS_PORT, SPI_CS_PIN )
#define DUMMY 0x00
#define READ_JEDEC_ID 0x9F
#define ERASE_SECTOR 0x20
#define READ_STATUS 0x05
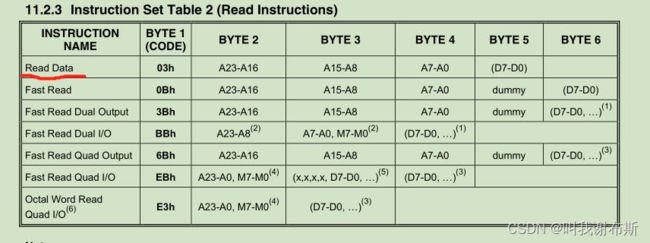
#define READ_DATA 0x03
#define WRITE_ENABLE 0x06
#define WRITE_DATA 0x02
void SPI_GPIO_Configuration(void);
uint8_t SPI_Flash_Send_Byte(uint8_t data);
uint8_t SPI_Flash_Read_Byte(void);
uint32_t SPI_Read_ID(void);
#endif
#include "bsp_spi.h"
#include "delay.h"
void SPI_GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE );
//CS
GPIO_InitStructure.GPIO_Pin = SPI_CS_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(SPI_CS_PORT, &GPIO_InitStructure);
//SCK
GPIO_InitStructure.GPIO_Pin = SPI_SCK_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI_SCK_PORT, &GPIO_InitStructure);
//MISO
GPIO_InitStructure.GPIO_Pin = SPI_MISO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(SPI_MISO_PORT, &GPIO_InitStructure);
//MOSI
GPIO_InitStructure.GPIO_Pin = SPI_MOSI_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI_MOSI_PORT, &GPIO_InitStructure);
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE);
SPI_FLASH_CS_HIGH();
}
void SPI_Write_Enable(void)
{
SPI_FLASH_CS_LOW();
SPI_Flash_Send_Byte(WRITE_ENABLE);
SPI_FLASH_CS_HIGH();
}
uint8_t SPI_Flash_Send_Byte(uint8_t data)
{
unsigned char retry = 0;
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET)
{
retry++;
if(retry > 200)
return 0;
}
SPI_I2S_SendData(SPI1, data);
retry = 0;
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET)
{
retry++;
if(retry > 200)
return 0;
}
return SPI_I2S_ReceiveData(SPI1);
}
uint8_t SPI_Flash_Read_Byte(void)
{
return SPI_Flash_Send_Byte(DUMMY);
}
uint32_t SPI_Read_ID(void)
{
uint32_t flash_id = 0;
SPI_FLASH_CS_LOW();
SPI_Flash_Send_Byte(READ_JEDEC_ID);
flash_id = SPI_Flash_Send_Byte(DUMMY);
flash_id <<= 8;
flash_id |= SPI_Flash_Send_Byte(DUMMY);
flash_id <<= 8;
flash_id |= SPI_Flash_Send_Byte(DUMMY);
SPI_FLASH_CS_HIGH();
return flash_id;
}
/******************************************************************************
** (c)Copyright 2022
** ALL RIGHTS RESERVED
** File Name:main.c
** Discribe:
** Author :
** Update List:
**
*******************************************************************************/
/*Includes --------------------------------------------------------------------*/
#include "main.h"
#include "delay.h"
#include "bsp_uart.h"
#include "bsp_spi.h"
TIME Time;
SYSTEM System;
STATUS Status;
int main(void)
{
uint32_t id = 0;
delay_init();
USART_Config();
SPI_GPIO_Configuration();
printf("This is SPI_Flash Test Program\n");
id = SPI_Read_ID();
printf("id = %x\n", id);
while(1)
{
}
}
对 W25Q64 进行数据的写入和读取
#ifndef _BSP_SPI_H_
#define _BSP_SPI_H_
#include "stm32f10x.h"
#define SPI_CS_PORT GPIOA
#define SPI_CS_PIN GPIO_Pin_4
#define SPI_SCK_PORT GPIOA
#define SPI_SCK_PIN GPIO_Pin_5
#define SPI_MISO_PORT GPIOA
#define SPI_MISO_PIN GPIO_Pin_6
#define SPI_MOSI_PORT GPIOA
#define SPI_MOSI_PIN GPIO_Pin_7
#define SPI_FLASH_CS_LOW() GPIO_ResetBits(SPI_CS_PORT, SPI_CS_PIN )
#define SPI_FLASH_CS_HIGH() GPIO_SetBits(SPI_CS_PORT, SPI_CS_PIN )
#define DUMMY 0x00
#define READ_JEDEC_ID 0x9F
#define ERASE_SECTOR 0x20
#define READ_STATUS 0x05
#define READ_DATA 0x03
#define WRITE_ENABLE 0x06
#define WRITE_DATA 0x02
void SPI_GPIO_Configuration(void);
uint8_t SPI_Flash_Send_Byte(uint8_t data);
uint8_t SPI_Flash_Read_Byte(void);
uint32_t SPI_Read_ID(void);
void SPI_Erase_Sector(uint32_t addr);
void SPI_WaitForWriteEnd(void);
void SPI_Read_Data(uint32_t addr, uint8_t* data_buff, uint32_t data_length);
void SPI_Write_Data(uint32_t addr, uint8_t* data_buff, uint32_t data_length);
#endif
#include "stm32f10x.h"
#include "bsp_spi.h"
/**************************************************************************************************
** 函数名称: SPI_GPIO_Configuration
** 功能描述: SPI_GPIO初始化函数
** 输入参数: 无
** 返回参数: 无
**************************************************************************************************/
void SPI_GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE );
//CS
GPIO_InitStructure.GPIO_Pin = SPI_CS_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(SPI_CS_PORT, &GPIO_InitStructure);
//SCK
GPIO_InitStructure.GPIO_Pin = SPI_SCK_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI_SCK_PORT, &GPIO_InitStructure);
//MISO
GPIO_InitStructure.GPIO_Pin = SPI_MISO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(SPI_MISO_PORT, &GPIO_InitStructure);
//MOSI
GPIO_InitStructure.GPIO_Pin = SPI_MOSI_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI_MOSI_PORT, &GPIO_InitStructure);
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE);
SPI_FLASH_CS_HIGH();
}
/**************************************************************************************************
** 函数名称: SPI_Write_Enable
** 功能描述: 写使能函数,每次往内存写数据的时候都需要先写这个函数
** 输入参数: 无
** 返回参数: 无
**************************************************************************************************/
void SPI_Write_Enable(void)
{
SPI_FLASH_CS_LOW();
SPI_Flash_Send_Byte(WRITE_ENABLE);
SPI_FLASH_CS_HIGH();
}
/**************************************************************************************************
** 函数名称: SPI_Flash_Send_Byte
** 功能描述: 写flash中写字节数据
** 输入参数: data
** 返回参数: uint8_t
**************************************************************************************************/
uint8_t SPI_Flash_Send_Byte(uint8_t data)
{
unsigned char retry = 0;
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET)
{
retry++;
if(retry > 200)
return 0;
}
SPI_I2S_SendData(SPI1, data);
retry = 0;
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET)
{
retry++;
if(retry > 200)
return 0;
}
return SPI_I2S_ReceiveData(SPI1);
}
/**************************************************************************************************
** 函数名称: SPI_Flash_Read_Byte
** 功能描述: 返回接收的字节数据
** 输入参数: 无
** 返回参数: 无
**************************************************************************************************/
uint8_t SPI_Flash_Read_Byte(void)
{
return SPI_Flash_Send_Byte(DUMMY);
}
/**************************************************************************************************
** 函数名称: SPI_Read_ID
** 功能描述: 读取设备ID
** 输入参数: 无
** 返回参数: uint32_t
**************************************************************************************************/
uint32_t SPI_Read_ID(void)
{
uint32_t flash_id = 0;
SPI_FLASH_CS_LOW();
SPI_Flash_Send_Byte(READ_JEDEC_ID);
flash_id = SPI_Flash_Send_Byte(DUMMY);
flash_id <<= 8;
flash_id |= SPI_Flash_Send_Byte(DUMMY);
flash_id <<= 8;
flash_id |= SPI_Flash_Send_Byte(DUMMY);
SPI_FLASH_CS_HIGH();
return flash_id;
}
/**************************************************************************************************
** 函数名称: SPI_Erase_Sector
** 功能描述: 擦除FLASH指定扇区
** 输入参数: addr 24位地址值
** 返回参数: 无
**************************************************************************************************/
void SPI_Erase_Sector(uint32_t addr)
{
SPI_Write_Enable();
SPI_FLASH_CS_LOW();
SPI_Flash_Send_Byte(ERASE_SECTOR);
SPI_Flash_Send_Byte((addr >> 16) & 0xff);
SPI_Flash_Send_Byte((addr >> 8) & 0xff);
SPI_Flash_Send_Byte((addr) & 0xff);
SPI_FLASH_CS_HIGH();
SPI_WaitForWriteEnd();
}
//擦除和写入都是需要耗费时间的,因此擦除后需要等待FLASH内部时序操作完成
/**************************************************************************************************
** 函数名称: SPI_WaitForWriteEnd
** 功能描述: 等待FLASH内部时序操作完成
** 输入参数: 无
** 返回参数: 无
**************************************************************************************************/
void SPI_WaitForWriteEnd(void)
{
uint8_t status_reg = 0;
SPI_FLASH_CS_LOW();
SPI_Flash_Send_Byte(READ_STATUS);
do
{
status_reg = SPI_Flash_Read_Byte();
}while((status_reg & 0x01) == 1);
SPI_FLASH_CS_HIGH();
}
/**************************************************************************************************
** 函数名称: SPI_Read_Data
** 功能描述: 读取数据
** 输入参数:
** 返回参数: 无
**************************************************************************************************/
void SPI_Read_Data(uint32_t addr, uint8_t* data_buff, uint32_t data_length)
{
SPI_FLASH_CS_LOW();
SPI_Flash_Send_Byte(READ_DATA);
SPI_Flash_Send_Byte((addr >> 16) & 0xff);
SPI_Flash_Send_Byte((addr >> 8) & 0xff);
SPI_Flash_Send_Byte((addr) & 0xff);
while(data_length--)
{
*data_buff = SPI_Flash_Send_Byte(DUMMY);
data_buff++;
}
SPI_FLASH_CS_HIGH();
SPI_WaitForWriteEnd();
}
/**************************************************************************************************
** 函数名称: SPI_Write_Data
** 功能描述: 写入数据
** 输入参数:
** 返回参数: 无
**************************************************************************************************/
void SPI_Write_Data(uint32_t addr, uint8_t* data_buff, uint32_t data_length)
{
SPI_Write_Enable();
SPI_FLASH_CS_LOW();
SPI_Flash_Send_Byte(WRITE_DATA);
SPI_Flash_Send_Byte((addr >> 16) & 0xff);
SPI_Flash_Send_Byte((addr >> 8) & 0xff);
SPI_Flash_Send_Byte((addr) & 0xff);
while(data_length--)
{
SPI_Flash_Send_Byte(*data_buff);
data_buff++;
}
SPI_FLASH_CS_HIGH();
SPI_WaitForWriteEnd();
}
/******************************************************************************
** (c)Copyright 2022
** ALL RIGHTS RESERVED
** File Name:main.c
** Discribe:
** Author :
** Update List:
**
*******************************************************************************/
/*Includes --------------------------------------------------------------------*/
#include "main.h"
#include "delay.h"
#include "bsp_uart.h"
#include "bsp_spi.h"
TIME Time;
SYSTEM System;
STATUS Status;
uint8_t write_buf[4096] = {0};
uint8_t read_buf[4096] = {0};
int main(void)
{
uint32_t id = 0;
delay_init();
USART_Config();
SPI_GPIO_Configuration();
printf("This is SPI_Flash Test Program\n");
id = SPI_Read_ID();
printf("id = %x\n", id);
SPI_Erase_Sector(0);
SPI_WaitForWriteEnd();
for(uint16_t i = 0; i < 4096; i++)
{
write_buf[i] = i;
}
SPI_Write_Data(0, write_buf, 4096);
SPI_Read_Data(0, read_buf, 4096);
for(uint16_t i = 0; i < 4096; i++)
{
printf("0x%x ", read_buf[i]);
if(i % 10 == 0)
{
printf("\n");
}
}
while(1)
{
}
}
