树莓派4B使用ncnn部署yolov5-Lite,推理耗时 247ms 包含前后处理
一. 引言
最近在玩树莓派,想在树莓派上不是一个目标检测算法,大致看了一下,目前开源的大家都在使用yolov5-Lite,使用ncnn去推理加速,于是自己也尝试部署,在此记录一下,个人踩的坑。
二. 版本选择
这个非常重要,非常重要,非常重要
1. ncnn版本
一定要下载这个版本的ncnn
本人ncnn版本是20210525版本的,其他版本试过几个都不行,强烈推荐这个版本。ncnn版本连接https://github.com/Tencent/ncnn/tree/20210525
下载
git clone https://github.com/Tencent/ncnn.git
安装依赖
sudo apt-get install -y gfortran
sudo apt-get install -y libprotobuf-dev libleveldb-dev libsnappy-dev libopencv-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install --no-install-recommends libboost-all-dev
sudo apt-get install -y libgflags-dev libgoogle-glog-dev liblmdb-dev libatlas-base-dev
编译ncnn
cd ~/ncnn
mkdir build
cmake ..
make -j4
make install
2. yolov5-Lite版本
由于作者版本更新,我目前使用最新的版本时候,有一些bug在ncnn上,没来及修改,于是我使用了之前的版本。推荐这个版本 yolov5-Lite版本 https://github.com/ppogg/YOLOv5-Lite/tree/v1.4
下载
git clone https://github.com/ppogg/YOLOv5-Lite.git
安装依赖
建议按照作者提供的requirements.txt,尤其是pytorch版本一定要低于1.10版本,不然在模型导出,训练时候会报错,pytorch错误。
# pip install -r requirements.txt
# base ----------------------------------------
matplotlib>=3.2.2
numpy>=1.18.5
opencv-python>=4.1.2
Pillow
PyYAML>=5.3.1
scipy>=1.4.1
torch>=1.8.0
torchvision>=0.9.0
tqdm>=4.41.0
# logging -------------------------------------
tensorboard>=2.4.1
# wandb
# plotting ------------------------------------
seaborn>=0.11.0
pandas
# export --------------------------------------
# coremltools>=4.1
# onnx>=1.9.1
# scikit-learn==0.19.2 # for coreml quantization
# extras --------------------------------------
thop # FLOPS computation
pycocotools>=2.0 # COCO mAP
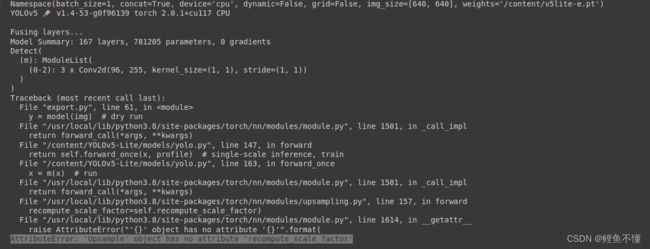
pytorch版本过高于1.10,会出现如下错误
三.模型转换
1. pt 转 onnx
cd ~/yolov5-Lite-1.4/
python3 export --weights "./best.pt" --batch-size 1 --img-size 320
使用onnx-simplifier对onnx进行简化
pip3 install onnx-simplifier
python -m onnxsim best.onnx best-sim.onnx
2. ncnn 模型转换
cd ~/ncnn/build/tools
./onnx2ncnn ./best-sim.onnx ./best-sim.param ./best-sim.bin
转化成fp16
./ncnnoptimize ./best-sim.param ./best-sim.bin ./best-sim-fp16.param ./best-sim-fp16.bin 65536
其中65536 是设置模型转为f16开关
65536来自源码 vim ~/ncnn/tools/ncnnoptimize.cpp

3. 修改best-sim.param文件
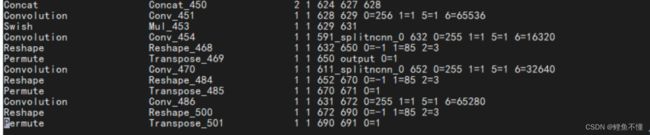
三个输出层的Reshape维度需要修改成-1
修改前:
Reshape Reshape_468 1 1 632 650 0=6400 1=85 2=3
Reshape Reshape_484 1 1 652 670 0=1600 1=85 2=3
Reshape Reshape_500 1 1 672 690 0=400 1=85 2=3
修改后:
Reshape Reshape_468 1 1 632 650 0=-1 1=85 2=3
Reshape Reshape_484 1 1 652 670 0=-1 1=85 2=3
Reshape Reshape_500 1 1 672 690 0=-1 1=85 2=3
632 表示输入层名称 650 表示输出层名称 0表示为第1维度个数 1表示第2维度个数 2表示第3个数
4.修改v5lite-s.cpp源码
#include "layer.h"
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include 修改代码中一些参数

ex.extract("output", out)
其中“output”对应best-sim-fl16.param中如下
Permute Transpose_469 1 1 650 output 0=1
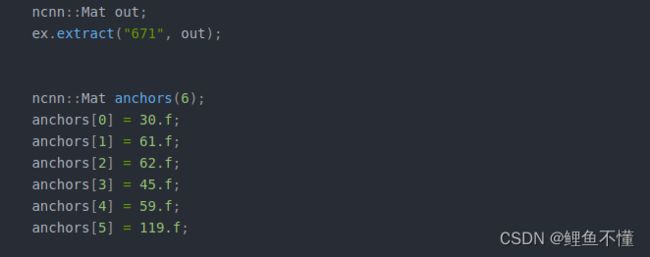
ex.extract("671", out)
其中“671”对应best-sim-fl16.param中如下
Permute Transpose_485 1 1 670 671 0=1
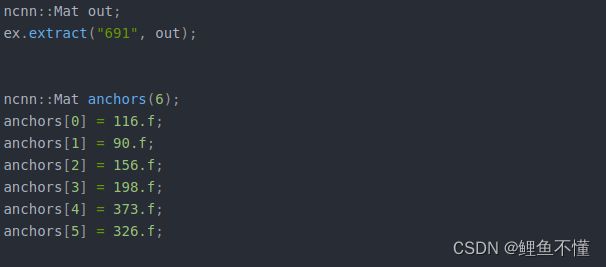
ex.extract("691", out)
其中“691”对应best-sim-fl16.param中如下
Permute Transpose_501 1 1 690 691 0=1
由于anchors是官方训练的,可以不用修改,但是自己训练自己数据集一定要修改anchors,修改anchors,修改anchors
ncnn::Mat anchors(6);
anchors[0] = 10.f;
anchors[1] = 13.f;
anchors[2] = 16.f;
anchors[3] = 30.f;
anchors[4] = 33.f;
anchors[5] = 23.f;
anchors[0] = 30.f;
anchors[1] = 61.f;
anchors[2] = 62.f;
anchors[3] = 45.f;
anchors[4] = 59.f;
anchors[5] = 119.f;
anchors[0] = 116.f;
anchors[1] = 90.f;
anchors[2] = 156.f;
anchors[3] = 198.f;
anchors[4] = 373.f;
anchors[5] = 326.f;
四.编译v5lite-s.cpp
设置ncnn_DIR路径
export ncnn_DIR=~/ncnn/build/install/lib/cmake/ncnn
创建test目录
cd ~/ncnn
mdkir test
编写CMakeLists.txt
project(YOLOv5s)
cmake_minimum_required(VERSION 3.10.2)
# set(ncnn_DIR "/xxx/path/to/ncnn/xxx/lib/cmake/ncnn")
find_package(ncnn REQUIRED)
find_package(OpenCV REQUIRED)
add_executable(ncnnv5lite v5lite-s.cpp)
target_link_libraries(ncnnv5lite ncnn ${OpenCV_LIBS})
把刚刚编写好的v5lite-s.cpp放在test目录中
cp ~/ncnn/v5lite-s.cpp ~/ncnn/test/
编译
mkdir build
cmake ..
make -j4
五. 推理结果
推理耗时 247ms 包含前后处理
