基于GA-PSO遗传粒子群混合优化算法的VRPTW问题求解matlab仿真
目录
1.程序功能描述
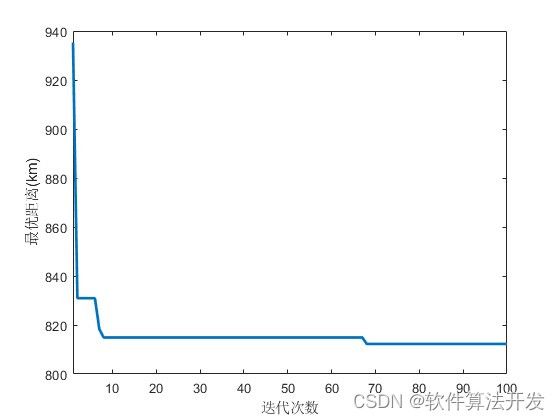
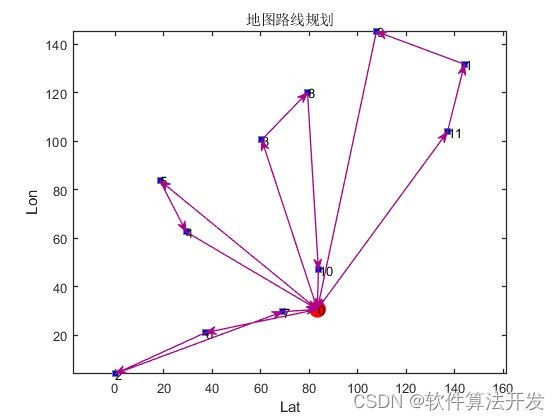
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
4.1 遗传算法(GA)基本原理
4.2 粒子群优化(PSO)基本原理
4.3 算法优化策略
5.完整程序
1.程序功能描述
VRPTW是车辆路径问题(VRP)的一个扩展,它在基本的车辆路径问题上增加了对客户服务时间窗的考虑,使得问题更加复杂且具有实际应用价值。在VRPTW问题中,有一组车辆从起点(通常是配送中心)出发,需要服务一组客户点,并最终返回起点。每个客户点都有一个服务时间窗,即最早服务时间和最晚服务时间。车辆必须在时间窗内到达客户点进行服务,并满足车辆的容量限制。目标是确定一组最优路径,使得所有客户点都被服务到,且总行驶成本(通常是总行驶距离或总行驶时间)最小化。
2.测试软件版本以及运行结果展示
MATLAB2022a版本运行
3.核心程序
..............................................................................
while gen <= Iters
gen
%粒子更新
for i=1:Npop
%交叉
Pops(i,2:end-1)=func_cross(Pops(i,2:end-1),Pbest(i,2:end-1));
%计算距离
Popd(i) = func_dist(Pops(i,:),Mdist,Vtime,Demand,TimeWindow,Travelcon,Capc);
if Popd(i) < Pdbest(i)
Pbest(i,:)= Pops(i,:);
Pdbest(i) = Popd(i);
end
%更新Gbest
[mindis,index] = min(Pdbest);
if mindis < Gdbest
Gbest = Pbest(index,:);
Gdbest = mindis;
end
%粒子与Gbest交叉
Pops(i,2:end-1)=func_cross(Pops(i,2:end-1),Gbest(2:end-1));
%粒子变异
Popd(i) = func_dist(Pops(i,:),Mdist,Vtime,Demand,TimeWindow,Travelcon,Capc);
if Popd(i) < Pdbest(i)
Pbest(i,:)=Pops(i,:);
Pdbest(i)=Popd(i);
end
%变异
Pops(i,:)=func_Mut(Pops(i,:));
Popd(i) = func_dist(Pops(i,:),Mdist,Vtime,Demand,TimeWindow,Travelcon,Capc);
if Popd(i) < Pdbest(i)
Pbest(i,:)=Pops(i,:);
Pdbest(i)=Popd(i);
end
%存储此代最短距离
[mindis,index] = min(Pdbest);
if mindis < Gdbest
Gbest = Pbest(index,:);
Gdbest = mindis;
end
end
gbest(gen)=Gdbest;
gen=gen+1;
end
174.本算法原理
在VRPTW问题中,有一组车辆从起点(通常是配送中心)出发,需要服务一组客户点,并最终返回起点。每个客户点都有一个服务时间窗,即最早服务时间和最晚服务时间。车辆必须在时间窗内到达客户点进行服务,并满足车辆的容量限制。目标是确定一组最优路径,使得所有客户点都被服务到,且总行驶成本(通常是总行驶距离或总行驶时间)最小化。
4.1 遗传算法(GA)基本原理
遗传算法是一种模拟自然选择和遗传机制的优化算法。它通过选择、交叉和变异等操作来模拟生物进化过程,从而寻找问题的最优解。在DVRP问题中,遗传算法的主要步骤如下:
编码:将问题的解(即车辆路径)表示为一种可以被遗传算法操作的编码形式。常见的编码方式包括基于客户序列的编码和基于路径的编码。
初始种群:随机生成一组初始解,构成初始种群。每个解代表一个可能的车辆路径方案。
适应度函数:定义一个适应度函数来评估每个解的质量。在DVRP问题中,适应度函数通常是路径总成本的倒数或负数,以最小化行驶距离为目标。
选择:根据适应度函数选择种群中较优的个体,用于产生下一代。常见的选择操作包括轮盘赌选择、锦标赛选择等。
交叉:通过交叉操作结合两个父代个体的部分基因,生成新的子代个体。在DVRP问题中,常用的交叉操作包括顺序交叉、部分匹配交叉等。
变异:对个体编码进行随机的小幅度改动,以增加种群的多样性。常见的变异操作包括交换变异、倒位变异等。
终止条件:当达到预设的迭代次数或满足其他终止条件时,算法停止,并输出当前最优解。
4.2 粒子群优化(PSO)基本原理
粒子群优化算法是一种模拟鸟群觅食行为的优化算法。它通过个体和群体的历史最佳位置来更新粒子的速度和位置,从而寻找问题的最优解。在PSO中,每个粒子代表一个潜在的解,并具有速度和位置属性。在DVRP问题中,粒子群优化的主要步骤如下:
初始化粒子群:随机初始化粒子的位置和速度。每个粒子的位置代表一个可能的车辆路径方案。
评估粒子:使用适应度函数评估每个粒子的质量。
更新个体和全局最佳位置:记录每个粒子的历史最佳位置和群体中的全局最佳位置。
更新速度和位置:根据个体和全局最佳位置更新粒子的速度和位置。速度更新公式为:

终止条件:当达到最大迭代次数或满足其他终止条件时,算法停止。
4.3 算法优化策略
为了进一步提高GA-PSO混合优化算法在VRPTW问题中的性能,可以采取以下优化策略:
-
动态调整惯性权重:根据算法的搜索状态动态调整惯性权重,以平衡全局和局部搜索能力。
-
精英策略:保留种群中的最优个体,避免在交叉和变异过程中丢失优秀基因。
-
邻域搜索:在粒子群优化中引入邻域搜索机制,以加快局部搜索速度。
-
多种群策略:使用多个种群并行搜索,增加算法的多样性,避免陷入局部最优。
-
启发式信息:利用启发式信息(如最近邻、节约算法等)来辅助生成初始种群,提高初始解的质量。
-
时间窗处理:针对VRPTW问题中的时间窗限制,采用适当的时间窗处理机制,如插入法、时间窗交换法等,以确保生成的解满足时间窗约束。
5.完整程序
VVV