关于CNN卷积神经网络与Conv2D标准卷积的重要概念
温故而知新,可以为师矣!
一、参考资料
深入解读卷积网络的工作原理(附实现代码)
深入解读反卷积网络(附实现代码)
Wavelet U-net进行微光图像处理
卷积知识点
CNN网络的设计论:NAS vs Handcraft
二、卷积神经网络(CNN)相关介绍
1. CNN网络简介
1.1 CNN特征提取
学习输入到输出的映射,并对映射关系加以训练,训练好的模型也具备了这种映射能力。浅层网络一般学习的是边缘、颜色、亮度等,较深层网络学习的是纹理,而更深层的网络学习的是具有一些辨识度的特征,所以卷积神经网络学习的特征逐渐抽象到更高级别。
1.2 CNN网络优点
-
参数共享。对输入图像进行卷积操作时,对不同的区域都会共享同一个卷积核,即共享同一组参数,使得网络的参数量才会大大减少;
-
稀疏性连接。进行卷积操作之后,输出图像的任何一个区域只跟输入图像的一部分有关。
1.3 stride步长
对于标准的k*k 卷积操作,stride为s,分三种情况:
(1) s>1,即卷积的同时做了 downsampling,卷积后图像尺寸减小;
(2) s=1,普通的步长为1的卷积,比如在tensorflow中设置 padding=SAME ,卷积的图像输入和输出有相同的尺寸大小;
(3) 0upsampling。比如 s = 1 2 s=\frac{1}{2} s=21时,意味着在图像每个像素之间padding一个空白的像素后,stride改为1做卷积,得到的 feature map 尺寸增大一倍。
2. CNN网络结构
CNN网络一般由输入层、卷积层(convolution layer)、激活层、 池化层(pooling layer)和全连接层(fully-connected layer,FC layer)五部分组成。其中,最核心的层包括:
convolution layer:提取spacial information;pooling layer:降低图像或特征图分辨率,减少运算量并获得semantic information;FC layer:回归目标。
注意:随着时代的改变,虽然pooling layer时常被较大stride的convolution取代,global average pooling 与1x1 convolution也时不时代替了 FC layer,这个大思路依然是大致没变的。
3. 卷积层
如果没有特殊说明,卷积指的是标准卷积(Conv2D),卷积操作指的是标准卷积的正向卷积过程。
卷积层功能:一张图像在计算机中自动识别为一个二维矩阵。卷积层对输入图像进行特征提取,其内部是由多个卷积核组成的,多个卷积核构成滤波器。
卷积层参数:卷积核大小、步长和填充方式。
卷积层重要特性:权值共享。对于任意一张图像,用一个滤波器按照先横后竖的顺序去覆盖这张图,因为这张图像的每个区域都是被同一个滤波器覆盖,所以各个 区域的权重一样。
多卷积层:一层卷积学到的特征往往是局部的,而卷积层数越多,学到的特征就越全局化。实际应用中,往往使用多层卷积,然后再使用全连接层进行训练。
3.1 卷积核(kernel/filters)
kernel称为卷积核,filters称为滤波器,多个kernel构成filters。卷积核的数量,也就是卷积核通道数。例如,卷积核的尺寸为: K ∗ K ∗ 3 ∗ M K*K*3*M K∗K∗3∗M,单个卷积核尺寸为: K ∗ K ∗ 3 K*K*3 K∗K∗3,卷积核的数量为: M M M,即表示通道数。
在TensorFlow中叫filters,在keras中叫kernel,不同文献有不同的叫法,在这里统一叫做卷积核kernel,一般kernel的大小(height*width)为1X1,3X3,5X5,7X7。
卷积核与特征(特征图)的关系:不同的卷积核可以提取不同的特征,一个卷积核只能提取一种特征,32个卷积核就可以提取32种特征。通过卷积操作,一个卷积核对应输出一维特征图,多个卷积核对应输出多维特征图,维度也称为特征图的深度,即对应特征图通道数。

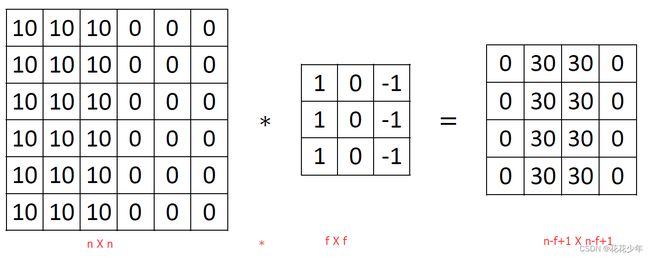
3.2 卷积操作
卷积操作是基于卷积的数学运算,可以将卷积核看成 一个二维数字矩阵,输入图像与卷积核进行卷积后就得到了特征图。先在输入图 像的某一个区域覆盖卷积核,然后将卷积核中的每一个数值与输入图像相应位置像素的数值相乘,把乘积累加起来,得到的和便是输出图像对应位置中目标像素 的数值,多次重复此操作直到输入图像中所有区域被卷积核覆盖完整。
3.3 卷积操作的数学原理
定义一个尺寸为 4×4 的输入矩阵 input:
i n p u t = [ x 1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 x 9 x 10 x 11 x 12 x 13 x 14 x 15 x 16 ] \left.input=\left[\begin{array}{cccc}x_1&x_2&x_3&x_4\\x_5&x_6&x_7&x_8\\x_9&x_{10}&x_{11}&x_{12}\\x_{13}&x_{14}&x_{15}&x_{16}\end{array}\right.\right] input= x1x5x9x13x2x6x10x14x3x7x11x15x4x8x12x16
一个尺寸为3×3 的标准卷积核 kernel:
k e r n e l = [ w 0 , 0 w 0 , 1 w 0 , 2 w 1 , 0 w 1 , 1 w 1 , 2 w 2 , 0 w 2 , 1 w 2 , 2 ] kernel=\begin{bmatrix}w_{0,0}&w_{0,1}&w_{0,2}\\w_{1,0}&w_{1,1}&w_{1,2}\\w_{2,0}&w_{2,1}&w_{2,2}\end{bmatrix} kernel= w0,0w1,0w2,0w0,1w1,1w2,1w0,2w1,2w2,2
令步长 s t r i d e s = 1 strides=1 strides=1,填充 p a d d i n g = 0 padding=0 padding=0 ,即 i = 4 , k = 3 , s = 1 , p = 0 i=4,k=3,s=1,p=0 i=4,k=3,s=1,p=0 ,则按照 公式 ( 1 ) 公式(1) 公式(1) 计算可得尺寸为 2×2的输出矩阵 o u t p u t output output :
o u t p u t = [ y 0 y 1 y 2 y 3 ] output=\begin{bmatrix}y_0&y_1\\y_2&y_3\end{bmatrix} output=[y0y2y1y3]
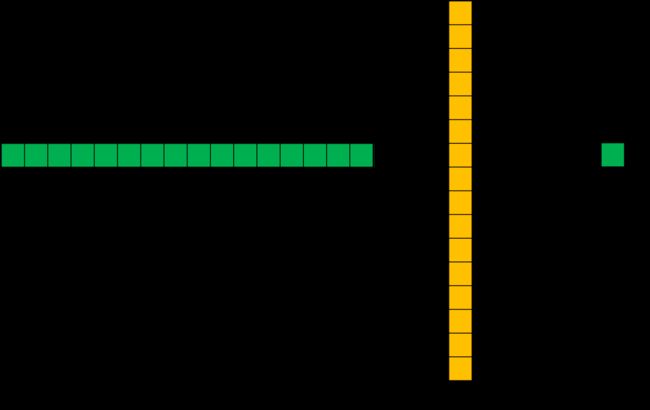
这里,我们换一个表达方式,我们将输入矩阵 input 和输出矩阵 output 展开成列向量 X 和列向量 Y ,那么向量 X 和向量 Y 的尺寸就分别是 16×1 和 4×1,可以分别用如下公式表示:
把输入矩阵 input 展开成一个16×1列向量 X X X:
X = [ x 1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 x 9 x 10 x 11 x 12 x 13 x 14 x 15 x 16 ] T \begin{array}{llllllllllll}X=[x_{1}&x_{2}&x_{3}&x_{4}&x_{5}&x_{6}&x_{7}&x_{8}&x_{9}&x_{10}&x_{11}&x_{12}&x_{13}&x_{14}&x_{15}&x_{16}]^T\end{array} X=[x1x2x3x4x5x6x7x8x9x10x11x12x13x14x15x16]T
把输出矩阵 o u t p u t output output 展开成一个 4×1列向量 Y Y Y:
Y = [ y 1 y 2 y 3 y 4 ] T Y=\begin{bmatrix}y_1&y_2&y_3&y_4\end{bmatrix}^T Y=[y1y2y3y4]T
再用矩阵运算来描述标准卷积运算,这里使用矩阵 C 来表示标准卷积核矩阵:
Y = C X Y=CX Y=CX
经过推导,我们可以得到这个稀疏矩阵 C 的尺寸为 4×16:
C = [ u 0 , 0 w 0 , 1 w 0 , 2 0 w 1 , 0 w 1 , 1 w 1 , 2 0 w 2 , 0 w 2 , 1 w 2 , 3 0 0 0 0 0 0 w 0 , 0 w 0 , 1 w 0 , 2 0 w 1 , 0 w 1 , 1 w 1 , 2 0 w 2 , 0 w 2 , 1 w 2 , 2 0 0 0 0 0 0 0 0 w 0 , 0 w 0 , 1 w 0 , 2 0 w 1 , 0 w 1 , 1 w 1 , 2 0 w 2 , 0 w 2 , 1 w 2 , 2 0 0 0 0 0 0 w 0 , 0 w 0 , 1 w 0 , 2 0 w 1 , 0 w 1 , 1 w 1 , 2 0 w 2 , 0 w 2 , 1 w 2 , 2 ] C=\begin{bmatrix}u_{0,0}&w_{0,1}&w_{0,2}&0&w_{1,0}&w_{1,1}&w_{1,2}&0&w_{2,0}&w_{2,1}&w_{2,3}&0&0&0&0&0\\0&w_{0,0}&w_{0,1}&w_{0,2}&0&w_{1,0}&w_{1,1}&w_{1,2}&0&w_{2,0}&w_{2,1}&w_{2,2}&0&0&0&0\\0&0&0&0&w_{0,0}&w_{0,1}&w_{0,2}&0&w_{1,0}&w_{1,1}&w_{1,2}&0&w_{2,0}&w_{2,1}&w_{2,2}&0\\0&0&0&0&0&w_{0,0}&w_{0,1}&w_{0,2}&0&w_{1,0}&w_{1,1}&w_{1,2}&0&w_{2,0}&w_{2,1}&w_{2,2}\end{bmatrix} C= u0,0000w0,1w0,000w0,2w0,1000w0,200w1,00w0,00w1,1w1,0w0,1w0,0w1,2w1,1w0,2w0,10w1,20w0,2w2,00w1,00w2,1w2,0w1,1w1,0w2,3w2,1w1,2w1,10w2,20w1,200w2,0000w2,1w2,000w2,2w2,1000w2,2
上述矩阵运算如下图所示:
3.4 卷积计算公式
卷积的计算公式如下:
o = ⌊ i + 2 p − k s ⌋ + 1 i = size of input o = size of output p = p a d d i n g k = size of kernel s = s t r i d e s ( 1 ) o=\left\lfloor\frac{i+2p-k}{s}\right\rfloor+1 \quad \begin{array}{l} \\i=\textit{size of input}\\o=\textit{size of output}\\p=padding\\k=\textit{size of kernel}\\s=strides\end{array}\quad (1) o=⌊si+2p−k⌋+1i=size of inputo=size of outputp=paddingk=size of kernels=strides(1)
其中, ⌊ ⋅ ⌋ \left\lfloor\cdot\right\rfloor ⌊⋅⌋ 表示向下取整符号。
3.5 卷积参数量和计算量
卷积的三种模式:full, same, valid
卷积中参数量和计算量
卷积神经网络中的参数计算
理解分组卷积和深度可分离卷积如何降低参数量
网络解析(一):LeNet-5详解
图像识别-AlexNet网络结构详解
抽丝剥茧,带你理解转置卷积(反卷积)
深度学习中不同类型卷积的综合介绍:2D卷积、3D卷积、转置卷积、扩张卷积、可分离卷积、扁平卷积、分组卷积、随机分组卷积、逐点分组卷积等pytorch代码实现和解析。
//TODO
参数量(神经元数量)的概念:参与计算的参数个数,占用内存空间。
计算量,运算量(连接数):包括乘法和加法计算。
3.6 1x1卷积
一般来说,1x1的卷积对神经网络特征的学习作用不大,通常用来做shape的调整,即升维和降维。
3.7 1x1特征图
当输入特征图的width和heigth为1时,此时输出将由卷积核大小唯一决定,即卷积核若为nxn,则输出特征图大小也为nxn,后续计算可在此基础上继续套用卷积计算公式。
4. 池化层
4.1 引言
一个96x96的图像,如果用一个8x8大小的卷积核,每个特征的维度为(96-8+1)x(96-8+1)(假设padding使用VALID,步长strides为1)。定义400个特征(通道),最后的维度即为7921x400=3168400 大小的向量。最后再使用全连接进行分类的话,最后是三百万的卷积特征输入,由于维度太高十分容易出现过拟合。这时就需要用到池化。
4.2 池化层作用
池化又称作下采样,池化层通常在卷积层和激活层之后。池化层没有相应的参数,它往往存在于连续的卷积层之间。通过卷积和池化分别进行特征提取以及降维的目的。池化在图像识别中应用较多,但在一些网络模型的应用比如图像重建等并没有采用池化。
池化层是对不同位置的特征进行聚合统计。例如可以计算一个区域上某个特定特征的平均值(average_pooling),或者最大值(max_pooling)。最大值池化是最经常使用的池化方式,选取区域的最大值能够很好地保持原图的特征。在这一步操作过后不仅能够得到低得多的维度,还会增强泛化性能。
池化层是对卷积层提取到的特征再一次压缩。一方面,卷积输出中包含的大部分信息是冗余的,通过池化操作获得更主要的特征,防止出现过拟合现象;另一方面,通过池化操作减小输入的大小,减少输出中相似值的数量,从而减少参数的数量来简化网络计算的复杂性,提高网络模型的鲁棒性、容错性和运行效率。
4.3 池化层分类
-
最大池化(Max Pooling)。选择图像某一区域像素的最大值作为该区域池化操作后的数值。
-
平均池化(Average Pooling)。选择图像某一区域像素的平均值作为该区域池化操作后的数值。
4.4 池化计算公式
池化的计算与卷积计算类似,只是将stride步长设置为2,使得输出大小减半。
o = ⌊ i + 2 p − k 2 ⌋ + 1 i = size of input o = size of output p = p a d d i n g k = size of kernel s = s t r i d e s ( 2 ) o=\left\lfloor\frac{i+2p-k}{2}\right\rfloor+1 \quad \begin{array}{l} \\i=\textit{size of input}\\o=\textit{size of output}\\p=padding\\k=\textit{size of kernel}\\s=strides\end{array}\quad (2) o=⌊2i+2p−k⌋+1i=size of inputo=size of outputp=paddingk=size of kernels=strides(2)
其中, ⌊ ⋅ ⌋ \left\lfloor\cdot\right\rfloor ⌊⋅⌋ 表示向下取整符号。
5. 全连接层
全连接层常常出现在整个卷积神经网络的末尾处,将所有的局部特征连接起来。如果说卷积层是用来提取局部特征,那么全连接层就是把所有的局部特征通过权值矩阵进行整合,并进行归一化操作,最后对各种分类情况都输出一个概率值。全连接层的输出是一个一维向量,一方面可以起到维度变换的作用,特别是可以将高维度转变为低维度,同时把有用的信息保留下来;另一方面可以起到“分类器”的作用,根据全连接得到的概率完成对特征的分类。
6. 常用CNN网络架构
常见的CNN网络架构可以被切成三个部分:
Stem: 将输入图像用少量的 convolution 扫过,并调整分辨率度。
Body: 网络的主要部分,又可分为多个stage,通常每个stage执行一次下采样(降低分辨率)的操作,其内部则为一个或多个building block (如residual bottleneck)的重复组合。
Head: 使用stem与body提取的feature,执行目标任务的预测。

除此之外,Building block也是一个很常被使用的术语,指的是那些被不断重复使用的小网络组合,比如说ResNet中的 residual block、residual bottleneck block,又或是MobileNet中的depthwise convolution block 与 reverted bottleneck block。
7. 关于CNN网络的深度/宽度/分辨率
在不大幅改动主架构的情况下,一般调整的参数有以下三种:
7.1 深度D(depth)
深度是指从输入到输出,堆叠的 building block 或 convolution layer 的数量。在深度方面,越深的网络可以捕捉越复杂的特征,并且带来更好的泛化 (generalization) 能力。然而,过深的网络即使使用 skip connection 与 batch normalization,仍然容易因梯度消失 (gradient vanishing) 导致不易训练。
7.2 宽度W (width)
宽度是指 building block 或 convolution layer 输出 feature map的宽度 (channels或filters数)。在宽度方面,一般来说越宽的网络可以捕捉到更细节 (fine-grained) 的信息,并且容易训练。然而,宽而浅的网络却是难以捕捉复杂的特征。
7.3 分辨率R(resolution)
分辨率是指 building block 或 convolution layer输出 feature map 张量的长与宽。在分辨率方面,高分辨率无庸置疑的可以得到更多细节信息,在大多的论文中基本上都是提升performance的好法宝。显而易见的缺点就是运算量,然后在localization问题需要调整、匹配的receptive field。
7.4 总结
以下是EfficentNet论文提供单独增加深度、宽度与分辨率上的实验。从实验上可以看出,单独增强其中一项对效能的提升都是有效的,但是很快这个效果就会饱和。

基于单一强化的实验,EfficientNet的作者认为应该要一起考虑强化深度、宽度与分辨率三项。然而,在一定的运算量设定下,如何决定调整这三项之间的调整比例则是一个开放的问题。
同时提高深度、宽度与分辨率,其运算量翻倍增加 (例如,增加两倍深度,会增加两倍运算量;增加宽度或分辨率度两倍,则会增加运算量四倍)。