用Go代码模拟数组,足够硬核
前奏
书接上文:https://blog.csdn.net/dawnto/article/details/135289279
我们对数组下了一个定义:数组是对线性的内存区域的抽象;高维数组和一维数组有着同样的内存布局。
如果我们想要将一片连续的内存区域映射成高维度数组。或者说的更直白一些,想将高维数组映射到一维数组。
完成这个想法的前提是寻找高维数组和一维数组的下标关系;从而计算地址偏移量即可。
关系映射
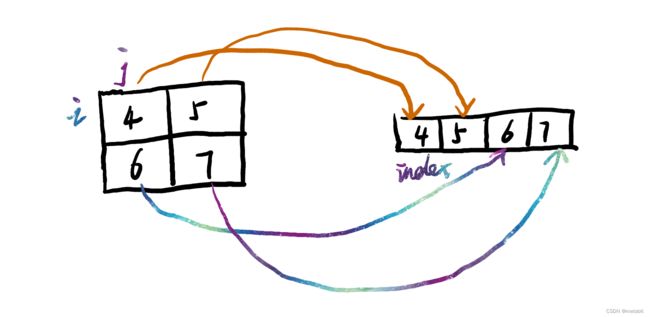
约定一下,将左侧数组称为arr0,右侧一维数组称为arr1。
一维数组
假设将一个一维数组,映射到另一个一维数组。那么关系十分简单。如下图所示。

arr0和 arr1长度相等,下标从0开始滚动直到arr等长度 - 1,假设arr0和arr1的长度为N,则:
i的取值范围是:[0,N)
k的取值范围是:[0,N)
即一维数组到一维数组的下标映射,使下标i和下标index同步即可。
arr1[0] = arr0[1]
arr1[1] = arr0[1]
...
arr1[index] = arr0[i]
公式:
index = i
arr1[index] = arr0[i]
arr1[i] = arr0[i]
二维数组
二维数组的下标向一维数组下标映射。
假设左侧arr0的长度是M,arr0[0]中的一维数组长度是N,右侧arr1的长度是W
则下标关系可表示为:
i:[0,M)
j:[0,N)
index:[0,W)
那么,左右两个数组的长度关系可表示为:
W = M * N
若左侧数组arr0从前向后遍历,arr1同步遍历,则i,j与右侧数组的下标index关系可以表示为
index = i * N + j
即
arr1[0] = arr1[0][0]
arr1[1] = arr1[0][1]
arr1[2] = arr1[1][0]
arr1[3] = arr0[1][1]
 上图数组下标关系映射为
上图数组下标关系映射为
arr1[0] = arr0[0][0]
arr1[1] = arr0[0][1]
arr1[2] = arr0[0][2]
arr1[3] = arr0[1][0]
arr1[4] = arr0[1][1]
...
arr1[8] = arr0[2][2]
公式:
index = i * N + j
arr1[index] = arr0[i*N][j]
arr1[i * N + j] = arr0[i][j]
三维数组
3维数组到1维数组映射关系。
var arr [3][2][3]int
arr[0][0][0] ==> arr1[0*2*3 + 0*3 + 0*1] => arr1[0]
arr[0][0][1] ==> arr1[0*2*3 + 0*3 + 1*1] => arr1[1]
arr[0][0][2] ==> arr1[0*2*3 + 0*3 + 2*1] => arr1[2]
arr[0][1][0] ==> arr1[0*2*3 + 1*3 + 0*1] => arr1[3]
arr[0][1][1] ==> arr1[0*2*3 + 1*3 + 1*1] => arr1[4]
arr[0][1][2] ==> arr1[0*2*3 + 1*3 + 2*1] => arr1[5]
arr[1][0][0] ==> arr1[1*2*3 + 0*3 + 0*1] => arr1[6]
arr[1][0][1] ==> arr1[1*2*3 + 0*3 + 1*1] => arr1[7]
arr[1][0][2] ==> arr1[1*2*3 + 0*3 + 2*1] => arr1[8]
arr[1][1][0] ==> arr1[1*2*3 + 1*3 + 0*1] => arr1[9]
arr[1][1][1] ==> arr1[1*2*3 + 1*3 + 1*1] => arr1[10]
arr[1][1][2] ==> arr1[1*2*3 + 1*3 + 2*1] => arr1[11]
arr[2][0][0] ==> arr1[2*2*3 + 0*3 + 0*1] => arr1[12]
arr[2][0][1] ==> arr1[2*2*3 + 0*3 + 1*1] => arr1[13]
arr[2][0][2] ==> arr1[2*2*3 + 0*3 + 2*1] => arr1[14]
arr[2][1][0] ==> arr1[2*2*3 + 1*3 + 0*1] => arr1[15]
arr[2][1][1] ==> arr1[2*2*3 + 1*3 + 1*1] => arr1[16]
arr[2][1][2] ==> arr1[2*2*3 + 1*3 + 2*1] => arr1[17]
假设有两个数组
var [M][N][P]int arr0
var [M*N*P]int arr1
假设3维数组下标分别是,i,j,k, 一维数组下标为index则:
index = i * N * P + j * P + k
arr1[index] = arr0[i][j][k]
arr1[i * N * P + j * P + k] = arr0[i][j][k]
总结一下公式
高维数组向一维数组映射,下标关系为:
var [A][B][C]...[Z]int array0
var [A * B * C *...* Z] array1
array1[a * B*C...*Z + b * C*D*...*Z + z * 1] = array0[a][b]...[z]
假设我们有一个容器:dimensions := []int{2, 3, 5} // var array [2][3][5]int,存储了某数组各个维度的宽度。则可以通过逆序乘积的方式,求各个维度的系数,用下标i,j,k去乘以每个维度的系数就可以得到线性的一维数组下标,fmt.Println(i*tmpArray[0] + j*tmpArray[1] + k*tmpArray[2])。
func TestDimension(t *testing.T) {
dimensions := []int{2, 3, 5} //var array [2][3][5]int
tmpArray := make([]int, len(dimensions))
mul := 1 // 总乘积
for i := len(dimensions) - 1; i >= 0; i-- {
tmpArray[i] = mul
mul *= dimensions[i]
}
//fmt.Println(dimensions)
//fmt.Println(tmpArray)
for i := 0; i < 2; i++ {
for j := 0; j < 3; j++ {
for k := 0; k < 5; k++ {
fmt.Println(i*tmpArray[0] + j*tmpArray[1] + k*tmpArray[2])
}
}
}
}
模拟数组代码
package Go
import (
"fmt"
"testing"
"unsafe"
)
type array[T any] struct {
data unsafe.Pointer // 内存区域指针
n int // 数组有n个维度
dimension map[int]uint // 每个维度的数据宽度,用于判定数组索引是否越界
factor map[int]uint // 映射到一维数组的偏移量
elemSize uintptr // 类型大小
}
// NewArray create an Array.
// array := NewArray[int](10,5,7,8) equals var array [10][5][7][8]int
func NewArray[T any](dimensions ...uint) *array[T] {
n := len(dimensions) // n个维度的数组
if n == 0 {
panic("invalid dimensions")
}
dimensionMap := make(map[int]uint)
factorMap := make(map[int]uint)
f := uint(1)
for i := range dimensions {
dimensionMap[n-i-1] = dimensions[i]
factorMap[n-i-1] = f // 反向索引映射
f *= dimensions[n-i-1]
}
return &array[T]{
data: malloc[T](f),
n: n,
dimension: dimensionMap,
factor: factorMap,
elemSize: unsafe.Sizeof(*(*T)(nil)),
}
}
func malloc[T any](size uint) unsafe.Pointer {
origin := unsafe.Sizeof(*(*T)(nil))
memPointer := make([]uint8, uint(origin)*size)
// defer runtime.KeepAlive(memPointer)
return *(*unsafe.Pointer)(unsafe.Pointer(&memPointer))
}
func (a *array[T]) Set(value T, index ...uint) {
if len(index) != a.n {
panic("out of dimensions")
}
location := uint(0)
for i := range index {
if index[i] >= a.dimension[i] || index[i] < 0 {
panic("index out of bounds")
}
location += index[i] * a.factor[i]
}
*(*T)(unsafe.Add(a.data, uintptr(location)*a.elemSize)) = value
}
func (a *array[T]) Get(index ...uint) T {
if len(index) != a.n {
panic("out of dimensions")
}
location := uint(0)
for i := range index {
if index[i] >= a.dimension[i] || index[i] < 0 {
panic("index out of bounds")
}
location += index[i] * a.factor[i]
}
return *(*T)(unsafe.Add(a.data, uintptr(location)*a.elemSize))
}
type student struct {
Name string
Age int
}
func TestArray(t *testing.T) {
studentArray := NewArray[student](3) // [10]student
studentArray.Set(student{ // student[0] = student{...}
Name: "zhang san",
Age: 10,
}, 0)
studentArray.Set(student{ // student[1] = student{...}
Name: "li si",
Age: 20,
}, 1)
fmt.Println(studentArray.Get(0))
fmt.Println(studentArray.Get(1))
fmt.Println(studentArray.Get(2))
array1 := NewArray[int](2, 2) // [2][2]int
array1.Set(1, 0, 0) // arr[0][0] = 1
array1.Set(2, 0, 1) // arr[0][1] = 2
array1.Set(3, 1, 0) // arr[1][0] = 3
array1.Set(4, 1, 1) // arr[1][1] = 4
fmt.Println(array1.Get(0, 0)) // arr[0][0]
fmt.Println(array1.Get(0, 1)) // arr[0][1]
fmt.Println(array1.Get(1, 0)) // arr[1][0]
fmt.Println(array1.Get(1, 1)) // arr[1][1]
array2 := NewArray[int](3, 3, 3) // [3][3][3]int
w := 1
for i := 0; i < 3; i++ {
for j := 0; j < 3; j++ {
for k := 0; k < 3; k++ {
array2.Set(w, uint(i), uint(j), uint(k))
w++
}
}
}
w = 1
for i := 0; i < 3; i++ {
for j := 0; j < 3; j++ {
for k := 0; k < 3; k++ {
num := array2.Get(uint(i), uint(j), uint(k))
if num != w {
fmt.Println("---", num, w)
panic("oi! 出错了")
}
w++
}
}
}
arr := *(*[27]int)(array2.data)
fmt.Println(arr) // [1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27
}
Reference
https://blog.csdn.net/dawnto/article/details/135289279