【现代控制理论笔记】——第四章:能观性分析
现代控制理论
第四章
说明:
本章主要对系统的能观性进行分析,先给出了能观性的定义,进而引出了能观/不能观子空间,推出了能观性判据和能观性指数;针对不完全能观的系统,也对能观性分解进行了分析。这些都与系统能控性的分析具有一致性,这是因为系统复合对偶性原理。最后,给出了离散时间系统的能观性分析判定方法。
1. 能观性的定义
由系统的状态空间描述,可以得到系统的运动特性:
x ( t ) = e A t x ( 0 ) + ∫ 0 t e A ( t − τ ) B u ( τ ) d τ . x(t)=e^{At}x(0)+\int_0^te^{A(t-\tau)}Bu(\tau)d\tau. x(t)=eAtx(0)+∫0teA(t−τ)Bu(τ)dτ.
可以看出,当输入给定时,系统的运动特性完全取决于初始状态。那么如何在已知输入输出的前提下,得到初始状态 x 0 x_0 x0便是待解决的问题。
对于一般情况,
x ( t ) = e A ( t − t 0 ) x ( t 0 ) + ∫ t 0 t e A ( t − τ ) B u ( τ ) d τ x(t)=e^{A(t-t_0)}x(t_0)+\int_{t_0}^te^{A(t-\tau)}Bu(\tau)d\tau x(t)=eA(t−t0)x(t0)+∫t0teA(t−τ)Bu(τ)dτ
其输出响应为:
y ( t ) = C x ( t ) + D u ( t ) y(t)=Cx(t)+Du(t) y(t)=Cx(t)+Du(t)
由于输入输出都假定已知,因此定义:
y ˉ = y − C ∫ t 0 t e A ( t − τ ) B u ( τ ) d τ − D u ( t ) \bar y=y-C\int_{t_0}^te^{A(t-\tau)}Bu(\tau)d\tau-Du(t) yˉ=y−C∫t0teA(t−τ)Bu(τ)dτ−Du(t)
= C e A ( t − t 0 ) x 0 =Ce^{A(t-t_0)}x_0 =CeA(t−t0)x0
能观性问题转变为 x 0 x_0 x0能不能由一一对应,进一步可以视作零输入系统:
x ˙ = A x y = C x \dot x=Ax\\ y=Cx x˙=Axy=Cx
输出唯一确定 x 0 x_0 x0的问题。

表示为:
若 x 0 x_0 x0为不能观测状态,当 t ∈ [ t 0 , T ] t\in[t_0,T] t∈[t0,T],有:
y = C e A ( t − t 0 ) x 0 ≡ 0 y=Ce^{A(t-t_0)}x_0\equiv0 y=CeA(t−t0)x0≡0
2. 不能观子空间与能观子空间
不能观子空间 X N O X_{NO} XNO的正交余空间称为能观子空间 X O X_O XO。
不能观子空间:


上式取转置可得任一不可观状态 α \alpha α与矩阵正交,因此有:

还可以推出:


3. 能观性判据
→Gram矩阵判据:
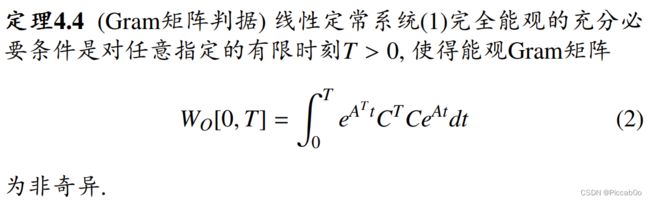
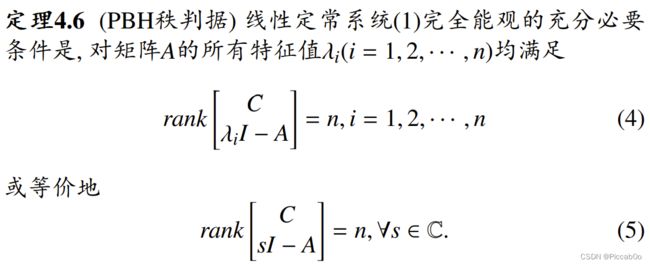
→秩判据:

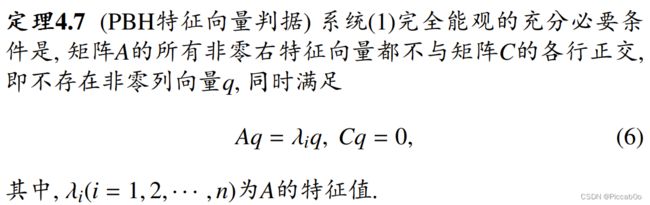
→PBH判据:
→Jordan标准型判据:

可以推出:y为q维输出

→极点任意配置:
( A , C ) (A,C) (A,C)能观等价于 ( A T , C T ) (A^T,C^T) (AT,CT)能控

4. 能观性指数
对于能观性矩阵 Q O Q_O QO,定义:
Q k = [ C C A ⋮ C A k − 1 ] Q_k=\begin{bmatrix}C\\CA\\\vdots\\CA^{k-1}\end{bmatrix} Qk= CCA⋮CAk−1
当k从1增加至v时,若 r a n k Q v = Q O = n rankQ_v=Q_O=n rankQv=QO=n,则称v为能观性指数。
估计公式为:输出q维,rankC=m
n q ⩽ ν ⩽ n − m + 1 \frac nq\leqslant\nu\leqslant n-m+1 qn⩽ν⩽n−m+1
5. 能观性分解
对于能观性,也有类似的分解过程。
由:
![]()
取 Q O Q_O QO中m个线性无关的行,记作 H 1 H_1 H1,再取n-m个与之线性无关的行向量,记作 H 2 H_2 H2
令 T = [ H 1 ; H 2 ] T=[H_1;H_2] T=[H1;H2],其为非奇异的。又记 T − 1 = [ T 1 , T 2 ] T^{-1}=[T_1,T_2] T−1=[T1,T2],由 T T − 1 = I TT^{-1}=I TT−1=I得:
H 1 T 2 = 0 H_1T_2=0 H1T2=0
这说明 T 2 T_2 T2各列属于 X N O X_{NO} XNO,因此可以做等价变换:
A = T A T − 1 = [ H 1 H 2 ] A [ T 1 T 2 ] = [ H 1 A T 1 0 H 2 A T 1 H 2 A T 2 ] ≜ [ A 11 0 A 21 A 22 ] , B ^ = TB = [ H 1 B H 2 B ] ≜ [ B 1 B 2 ] , C ^ = C T − 1 = [ C T 1 C T 2 ] = [ C T 1 0 ] ≜ [ C 1 0 ] . \begin{aligned} &\text{A} =TAT^{-1} \\ &=\begin{bmatrix}H_1\\H_2\end{bmatrix}A\begin{bmatrix}T_1&T_2\end{bmatrix} \\ &=\begin{bmatrix}H_1AT_1&{0}\\H_2AT_1&H_2AT_2\end{bmatrix}\triangleq\begin{bmatrix}A_{11}&0\\A_{21}&A_{22}\end{bmatrix}, \\ &\hat{B} \text{= TB} \\ &=\begin{bmatrix}H_1B\\H_2B\end{bmatrix}\triangleq\begin{bmatrix}B_1\\B_2\end{bmatrix}, \\ &\hat{C} =CT^{-1} \\ &=\begin{bmatrix}CT_1&CT_2\end{bmatrix} \\ &=\begin{bmatrix}CT_1&{0}\end{bmatrix}\triangleq\begin{bmatrix}C_1&0\end{bmatrix}. \end{aligned} A=TAT−1=[H1H2]A[T1T2]=[H1AT1H2AT10H2AT2]≜[A11A210A22],B^= TB=[H1BH2B]≜[B1B2],C^=CT−1=[CT1CT2]=[CT10]≜[C10].

6. 单输入单输出系统的能观规范型:
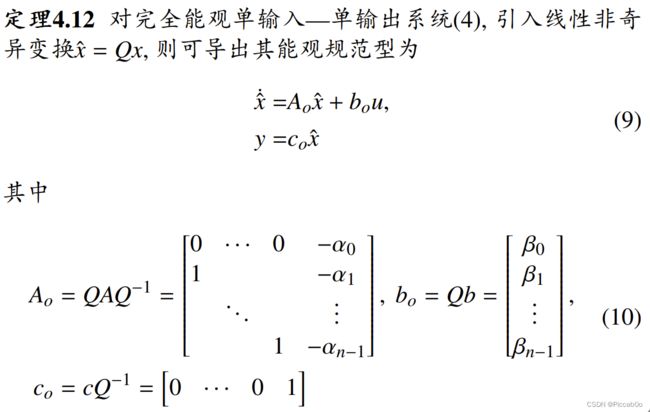
其中,
Q = [ e 1 e 2 ⋮ e n ] = [ 1 α n − 1 ⋯ α 1 ⋱ ⋱ ⋮ ⋱ α n − 1 1 ] [ c A n − 1 c A n − 2 ⋮ c ] Q=\begin{bmatrix}e_1\\e_2\\\vdots\\e_n\end{bmatrix}=\begin{bmatrix}1&\alpha_{n-1}&\cdots&\alpha_1\\&\ddots&\ddots&\vdots\\&&\ddots&\alpha_{n-1}\\&&&1\end{bmatrix}\begin{bmatrix}cA^{n-1}\\cA^{n-2}\\\vdots\\c\end{bmatrix} Q= e1e2⋮en = 1αn−1⋱⋯⋱⋱α1⋮αn−11 cAn−1cAn−2⋮c
注意:
这里能控标准型是 b c = [ 0 ; 0 ; . . . ; 1 ] b_c=[0;0;...;1] bc=[0;0;...;1],对应的是 b c = P − 1 B b_c=P^{-1}B bc=P−1B
而能观标准型是 c o = [ 0 ; 0 ; . . . ; 1 ] c_o=[0;0;...;1] co=[0;0;...;1],对应的是 c o = C Q − 1 c_o=CQ^{-1} co=CQ−1
注意能观标准型系统矩阵和能控标准型系统矩阵的异同
7. 对偶原理
结合前述能控性分析部分,我们发现能控性和能观性的分析在形式上很接近,这是由于系统的对偶原理导致的。
对偶原理指明了系统的控制问题和估计问题的内在联系。
定义:
若 ( A 1 , B 1 , C 1 ) (A_1,B_1,C_1) (A1,B1,C1)和 ( A 2 , B 2 , C 2 ) (A_2,B_2,C_2) (A2,B2,C2)两系统满足:
A 1 T = − A 2 , B 1 T = C 2 , C 1 T = B 2 A_{1}^{T}=-A_{2},B_{1}^{T}=C_{2},C_{1}^{T}=B_{2} A1T=−A2,B1T=C2,C1T=B2
则称两系统互为对偶系统。
有:

这说明 ( A , C ) (A,C) (A,C)的能观性即是 ( A T , C T ) (A^T,C^T) (AT,CT)的能控性。
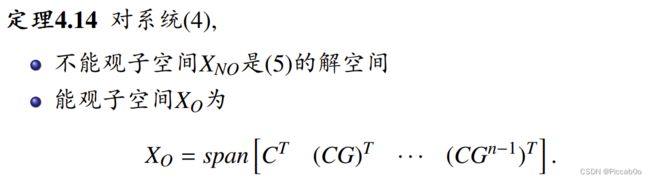
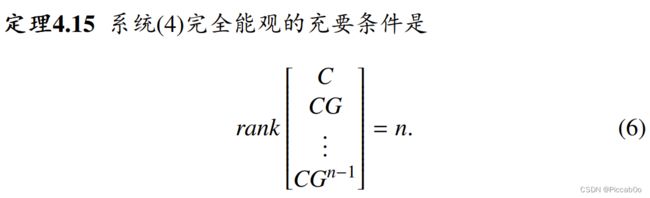
8. 线性定常离散系统的能观性:
对于系统:
x ( k + 1 ) = G x ( k ) y ( k ) = C x ( k ) \begin{aligned}x(k+1)&=Gx(k)\\y(k)&=Cx(k)\end{aligned} x(k+1)y(k)=Gx(k)=Cx(k)

![]()
线性定常连续时间系统离散化后的能观性:
离散后的系统能观,则离散前的系统一定能观。
![]()