FPGA驱动0.96寸OLED(SSD1306)
目录
一、七针0.96寸OLED驱动原理
二、SSD1306驱动时序
1、GDDRAM内部结构:
(1)页寻址
(2)水平寻址
(3)垂直寻址
2、初始化
3、清屏
4、发送数据
三、子模块源码
1、初始化
2、清屏
3、数据
四、top源码
五、仿真结果
六、板级验证
SPI主机写模式FPGA实现详细请见:FPGA实现SPI写模式(用于SSD1603的0.91寸OLED驱动)_LionelZhao的博客-CSDN博客 https://blog.csdn.net/LionelZhao/article/details/128553379
https://blog.csdn.net/LionelZhao/article/details/128553379
一、七针0.96寸OLED驱动原理
本实验所使用的七针OLED结构图和电路原理图如下:
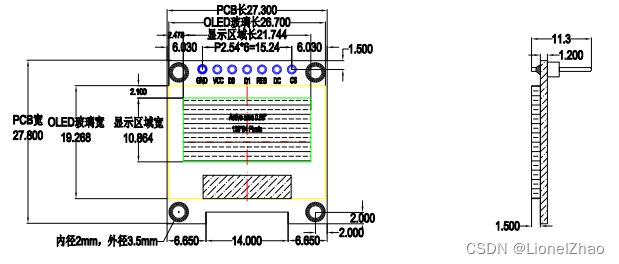
所使用的驱动芯片为SSD1306,通讯协议为4线SPI,七针名称与对应的功能列表如下:
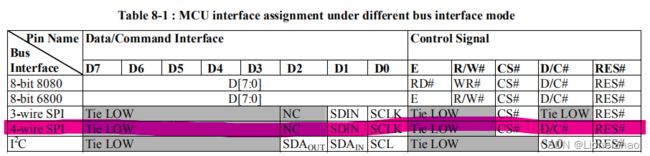
七根管脚分别为:GND、VCC、CS(片选 低电平有效)、DC(数据/命令控制 1数据,0命令)、D0(同步时钟信号sck)、D1(从机接收端MOSI)、RES(OLED清屏信号 低电平有效):

时序图如下:

二、SSD1306驱动时序
1、GDDRAM内部结构:
GDDRAM(Graphic Display Data RAM )内部结构如下所示:

将128*64个像素按8行一个PAGE分为8个PAGE,列SEG0~SEG127,这样通过PAGE和SEG的数值就能将8位长的数据显示在对应的位置上,从上到下为低位到高位,如下图所示。

GDDRAM三种寻址模式如下所示:
(1)页寻址
SSD1306默认页寻址模式,通过“20H,02H”命令可以设置寻址模式为页寻址。
页寻址模式下,寻址只在一页内进行,地址指针不会跳到其他页。每次向GDDRAM写入1Byte显示数据后,列指针会自动+1。当128列都寻址完之后,列指针会重新指向SEG0而页指针仍然保持不变。通过页寻址模式我们可以方便地对一个小区域内数据进行修改。


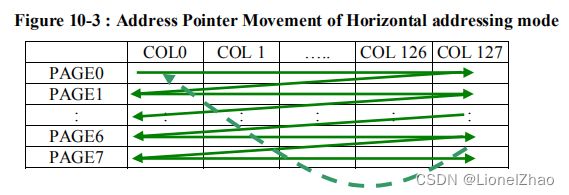
(2)水平寻址
水平寻址模式可以通过指令“20H,00H”来设置。
水平寻址模式下,每次向GDDRAM写入1Byte数据后,列地址指针自动+1。列指针到达结束列之后会被重置到起始列,而页指针将会+1。页地址指针达到结束页之后,将会自动重置到起始页。
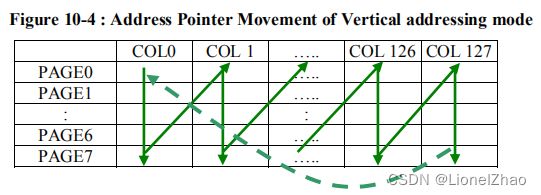
(3)垂直寻址
垂直寻址模式可以通过指令“20H,01H”来设置。
垂直寻址模式下,每次向GDDRAM写入1byte数据之后,页地址指针将会自动+1。页指针到达结束页之后会被重置到0,而列指针将会+1。列地址指针达到结束页之后,将会自动重置到起始列。
2、初始化
SSD1306驱动过程为:初始化->清屏->发送数据,常见命令如下:
在上电开始就需要发送控制命令来初始化OLED。
3、清屏
在发送这一帧数据之前需要先清楚上一帧的数据,只需要遍历PAGE和SEG的所有地址并发送数据8'h00就能实现清屏。
4、发送数据
与清屏同理,在对应的PAGE和SEG选中的Byte发送相应的数据,这样就能拼凑出想要的图案。
三、子模块源码
1、初始化
三段式状态机实现,需要配置多少个命令就添加对应数量的状态,在每一个状态发送响应的命令即可。
module OLED_initial(
input clk,//输入时钟
input rst_n,//系统复位
input SPI_done,//SPI发送完成通知
output DC,//1数据 0命令
output initial_done,//初始化完成标志
output SPI_send,//通过SPI发送数据
output reg [7:0] SPI_data//SPI发送的数据
);
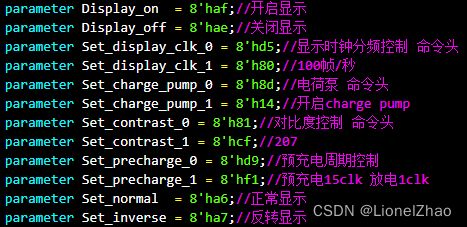
//定义初始化所需命令参数
parameter Display_on = 8'haf;//开启显示
parameter Display_off = 8'hae;//关闭显示
parameter Set_display_clk_0 = 8'hd5;//显示时钟分频控制 命令头
parameter Set_display_clk_1 = 8'h80;//100帧/秒
parameter Set_charge_pump_0 = 8'h8d;//电荷泵 命令头
parameter Set_charge_pump_1 = 8'h14;//开启charge pump
parameter Set_contrast_0 = 8'h81;//对比度控制 命令头
parameter Set_contrast_1 = 8'hcf;//207
parameter Set_precharge_0 = 8'hd9;//预充电周期控制
parameter Set_precharge_1 = 8'hf1;//预充电15clk 放电1clk
parameter Set_normal = 8'ha6;//正常显示
parameter Set_inverse = 8'ha7;//反转显示
//状态机参数定义
localparam S0 = 5'd0;
localparam S1 = 5'd1;
localparam S2 = 5'd2;
localparam S3 = 5'd3;
localparam S4 = 5'd4;
localparam S5 = 5'd5;
localparam S6 = 5'd6;
localparam S7 = 5'd7;
localparam S8 = 5'd8;
localparam S9 = 5'd9;
localparam S10 = 5'd10;
localparam S11 = 5'd11;
//状态寄存器
reg [4:0] cstate,nstate;
assign DC = 0;//发送恒为命令
assign initial_done = (cstate==S11)?1:0;//初始化完成
assign SPI_send = (cstate==S11)?0:1;//通过SPI发送数据
//状态转移同步逻辑
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
cstate <= S0;
end
else if(SPI_done)begin
cstate <= nstate;
end
else begin
cstate <= cstate;
end
end
//产生下一个状态组合逻辑
always @(*) begin
case(cstate)
S0:nstate = S1;
S1:nstate = S2;
S2:nstate = S3;
S3:nstate = S4;
S4:nstate = S5;
S5:nstate = S6;
S6:nstate = S7;
S7:nstate = S8;
S8:nstate = S9;
S9:nstate = S10;
S10:nstate= S11;
S11:nstate= S11;
default:nstate = S0;
endcase
end
//产生输出组合逻辑
always @(*) begin
case(cstate)
S0:SPI_data = Display_off;
S1:SPI_data = Set_display_clk_0;
S2:SPI_data = Set_display_clk_1;
S3:SPI_data = Set_charge_pump_0;
S4:SPI_data = Set_charge_pump_1;
S5:SPI_data = Set_contrast_0;
S6:SPI_data = Set_contrast_1;
S7:SPI_data = Set_precharge_0;
S8:SPI_data = Set_precharge_1;
S9:SPI_data = Set_inverse;
S10:SPI_data= Display_on;
S11:SPI_data= 0;
default:SPI_data= 0;
endcase
end
endmodule
2、清屏
需要定义x_tmp和y_tmp计数器来遍历所有PAGE和SEG选中的一共8*128个Byte发送8'h00。
发送数据的顺序是先发送PAGE,再发送列高地址然后列低地址,最后发送这一个位置的数据。
module OLED_clear(
input clk,
input rst_n,
input clear_en,//清零使能信号
input SPI_done,//SPI发送完成通知
output DC,//1数据 0命令
output clear_done,//清零完成信号
output reg SPI_send,//通过SPI发送数据
output reg [7:0]SPI_data//SPI发送数据
);
//状态机状态编码
localparam S0 = 3'd0;
localparam S1 = 3'd1;
localparam S2 = 3'd2;
localparam S3 = 3'd3;
localparam S4 = 3'd4;
localparam S5 = 3'd5;
localparam S6 = 3'd6;
//状态寄存器定义
reg [2:0] cstate,nstate;
//内部寄存器和信号线声明
reg [7:0] x_tmp,y_tmp;
wire [7:0] Set_pos_0,Set_pos_1,Set_pos_2;
assign Set_pos_0 = 8'hb0 | y_tmp;//PAGE地址
assign Set_pos_1 = (x_tmp[7:4] & 4'hf) | 8'h10;//高位列地址
assign Set_pos_2 = (x_tmp[3:0] & 4'hf);//低位列地址
assign DC = (cstate == S4)?1:0;
assign clear_done = (cstate == S6)?1:0;
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
x_tmp <= 8'd0;
y_tmp <= 8'd0;
end
else begin
case (cstate)
S0:begin
x_tmp <= 8'd0;
y_tmp <= 8'd0;
end
S5:begin
if(x_tmp == 130)begin
x_tmp <= 8'd0;
y_tmp <= y_tmp + 8'd1;
end
else begin
x_tmp <= x_tmp + 8'd1;
y_tmp <= y_tmp;
end
end
default:begin
x_tmp <= x_tmp;
y_tmp <= y_tmp;
end
endcase
end
end
//状态转移同步逻辑
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
cstate <= S0;
end
else begin
case (cstate)
S1,
S2,
S3,
S4:cstate <= SPI_done?nstate:cstate;
default:cstate <= nstate;
endcase
end
end
//产生下一个状态组合逻辑
always @(*) begin
nstate = cstate;
case(cstate)
S0:nstate = clear_en?S1:S0;
S1:nstate = S2;
S2:nstate = S3;
S3:nstate = S4;
S4:nstate = S5;
S5:nstate = (x_tmp==127 && y_tmp==7)?S6:S1;
S6:nstate = S0;
default:nstate = S0;
endcase
end
//产生输出组合逻辑
always @(*) begin
if(!rst_n)begin
SPI_data = 0;
SPI_send = 0;
end
else begin
case(cstate)
S1:begin
SPI_data = Set_pos_0;
SPI_send = 1;
end
S2:begin
SPI_data = Set_pos_1;
SPI_send = 1;
end
S3:begin
SPI_data = Set_pos_2;
SPI_send = 1;
end
S4:begin
SPI_data = 0;
SPI_send = 1;
end
default:begin
SPI_data = 0;
SPI_send = 0;
end
endcase
end
end
endmodule
3、数据
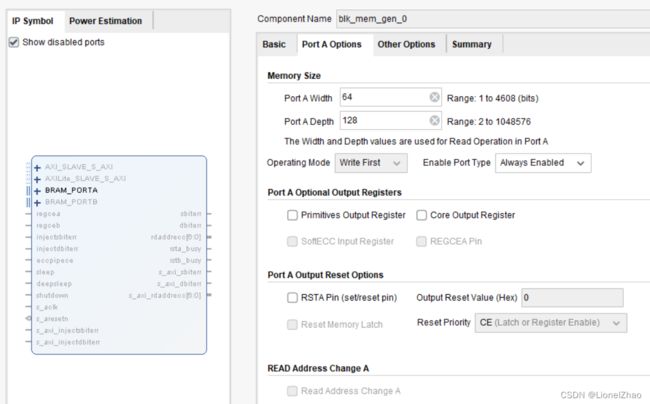
这里要显示图片:

需要先取模然后存放到ROM中,将取模软件得到的字模使用coe文件初始化ROM:
; This .COE file specifies the contents for a block memory of depth=64, and width=128.
memory_initialization_radix=16;
memory_initialization_vector=
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,000000001E1E3E3E,
7CFCF8F0E08080E0,F8F8FC7E3E1F1F1F,
1F1F3E3E7EFCF8F0,E080000000000000,
000000001E3E3E7E,FCFCF8F0E0000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
00003CFCFCFCF0C0,8000000000000080,
C0F3FFFFFF3F3FFF,FFFFF1C080000000,
0000000000030707,07077CFCFCFCF0C0,
8000000000000080,C0FFFFFFFF3F0000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
000000000103070F,0F0F1FDFDFDFCFCF,
8F87030100000000,0307070F0F0F1FDF,
E0E0E0C0C0800000,000000010387C7CF,
CFFFFFFFFFFFCFCF,8F87030100000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000808080800000,000000030307070F,
1FFFFFFEF8E08080,8080000000000001,
030303070FFFFFFE,FCF0F8FEFFFF1F0F,
070303030303070F,1FFFFFFEF8000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
00000F3F7FFFFEF8,F0E0E0C0C0E0E0F0,
F8FFFF7F1F070F1F,3F7FFCF8F0F0E0E0,
E0E0F0F8FCFF7F3F,0F030F3F7FFFFCF8,
F0E0E0E000000000,0000000000000000
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
00000080C0E0F1F1,FBFB7B7B03030303,
0100000000000000,C0E0E0F1F1F9F9F9,
F9F9F9F1F0E0E0C0,00000080C0E0F0F1,
F9F97B7B00000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000FEFFFFFFC701,0000000000000000,
00C0F0F0F0E0FCFF,FFFFDF0301000000,
00000001031F3F3F,3F3CFEFFFFFF8701,
0000000000000000,00E0F0F0F0E00000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
0000000000000000,0000000000000000,
000001070F1F3F3F,7E7C7C7C7C7C7C7E,
3F3F1F0F07010003,0F1F3F3F7C7C7878,
3000000000000000,000001070F1F3F3F,
7E7C7C7C7C7C7C7E,3F1F1F0F03000000,
0000000000000000,0000000000000000,
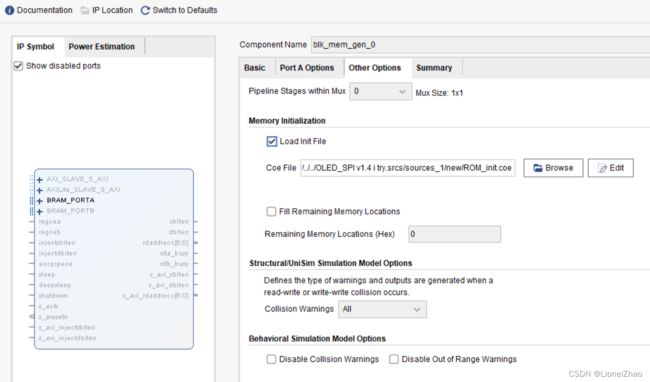
0000000000000000,0000000000000000;例化一个 ROM的IP,配置如下:

 将coe文件添加并初始化:
将coe文件添加并初始化:
数据发送模块,每次从ROM中读取64位数据分8次发送:
module OLED_write_data(
input clk,
input rst_n,
input write_en,
input SPI_done,
input [63:0]write_data,//需要发送的数据
input [6:0]set_pos_x,
input [2:0]set_pos_y,
output DC,
output write_done,//写数据完成标志
output reg SPI_send,//SPI传输使能
output reg [7:0] SPI_data//需要SPI发送的字节数据
);
//状态机状态编码
localparam IDLE = 3'd0;//空闲状态
localparam POS0 = 3'd1;//设置页地址
localparam POS1 = 3'd2;//设置列高地址
localparam POS2 = 3'd3;//设置列低地址
localparam DATA = 3'd4;//发送对应的数据
localparam JUDGE= 3'd5;//判断是否发送完成
localparam STOP = 3'd6;//停止发送
//状态寄存器
reg [2:0] cstate,nstate;
//内部寄存器和信号线声明
reg [2:0] count;//发送循环数计数器
reg [63:0] write_data_reg;//暂存需要发送的数据
reg [7:0] x_tmp,y_tmp;
wire [7:0] Set_pos_0,Set_pos_1,Set_pos_2;
assign Set_pos_0 = 8'hb0 | y_tmp; //页地址
assign Set_pos_1 = (x_tmp[7:4] & 4'hf) | 8'h10;//高位列地址
assign Set_pos_2 = (x_tmp[3:0] & 4'hf); //低位列地址
assign DC = (cstate == DATA)?1:0;
assign write_done = (cstate == STOP)?1:0;
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
x_tmp <= 8'd0;
y_tmp <= 8'd0;
write_data_reg <= 0;
count <= 0;
end
else begin
case (cstate)
IDLE:begin
x_tmp <= {1'b0,set_pos_x};
y_tmp <= {5'd0,set_pos_y};
write_data_reg <= write_data;
count <= 0;
end
JUDGE:begin
x_tmp <= x_tmp + 8'd1;
// y_tmp <= y_tmp;
// if(x_tmp>122) y_tmp<=y_tmp+1;
write_data_reg <= (write_data_reg<<8);
count <= count + 1;
end
default:begin
x_tmp <= x_tmp;
y_tmp <= y_tmp;
write_data_reg <= write_data_reg;
count <= count;
end
endcase
end
end
//状态转移同步逻辑
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
cstate <= IDLE;
end
else begin
case (cstate)
POS0,
POS1,
POS2,
DATA:cstate <= SPI_done?nstate:cstate;
default:cstate <= nstate;
endcase
end
end
//产生下一个状态组合逻辑
always @(*) begin
case(cstate)
IDLE:nstate = write_en?POS0:IDLE;
POS0:nstate = POS1;
POS1:nstate = POS2;
POS2:nstate = DATA;
DATA:nstate = JUDGE;
JUDGE:nstate = (&count)?STOP:POS0;
STOP:nstate = IDLE;
default:nstate = IDLE;
endcase
end
//产生输出组合逻辑
always @(*)begin
if(!rst_n)begin
SPI_data = 0;
SPI_send = 0;
end
else begin
case(cstate)
IDLE:begin
SPI_data = 0;
SPI_send = 0;
end
POS0:begin
SPI_data = Set_pos_0;
SPI_send = 1;
end
POS1:begin
SPI_data = Set_pos_1;
SPI_send = 1;
end
POS2:begin
SPI_data = Set_pos_2;
SPI_send = 1;
end
DATA:begin
SPI_data = write_data_reg[63:56];
SPI_send = 1;
end
JUDGE:begin
SPI_data = SPI_data;
SPI_send = 0;
end
STOP:begin
SPI_data = SPI_data;
SPI_send = SPI_send;
end
default:begin
SPI_data = 0;
SPI_send = 0;
end
endcase
end
end
endmodule
四、top源码
由于需要发送8*128=1024个Byte的数据,而发送数据模块一次从ROM中读取1*8个Byte,因此需要读取ROM128次,这就需要128个读数据状态和一个初始化状态、一个清屏状态和一个停止发送状态,使用格雷码来编码状态机并使用脚本来生成top代码。
module top(
input sys_clk,//系统时钟 100MHz
input sys_rst_n,//系统复位
output sclk,//同步时钟
output sck,
output reg res=0,//OLED清屏信号 低电平有效
output MOSI,//主机输出 从机输入
output CS,//片选信号 低电平有效
output DC//1数据 0命令
);
//状态编码
localparam INIT= 9'b000000000;//初始化
localparam CLR = 9'b000000001;//清屏
localparam D0 = 9'b000000011;//发送数据周期
localparam D1 = 9'b000000010;
localparam D2 = 9'b000000110;
localparam D3 = 9'b000000111;
localparam D4 = 9'b000000101;
localparam D5 = 9'b000000100;
localparam D6 = 9'b000001100;
localparam D7 = 9'b000001101;
localparam D8 = 9'b000001111;
localparam D9 = 9'b000001110;
localparam D10 = 9'b000001010;
localparam D11 = 9'b000001011;
localparam D12 = 9'b000001001;
localparam D13 = 9'b000001000;
localparam D14 = 9'b000011000;
localparam D15 = 9'b000011001;
localparam D16 = 9'b000011011;
localparam D17 = 9'b000011010;
localparam D18 = 9'b000011110;
localparam D19 = 9'b000011111;
localparam D20 = 9'b000011101;
localparam D21 = 9'b000011100;
localparam D22 = 9'b000010100;
localparam D23 = 9'b000010101;
localparam D24 = 9'b000010111;
localparam D25 = 9'b000010110;
localparam D26 = 9'b000010010;
localparam D27 = 9'b000010011;
localparam D28 = 9'b000010001;
localparam D29 = 9'b000010000;
localparam D30 = 9'b000110000;
localparam D31 = 9'b000110001;
localparam D32 = 9'b000110011;
localparam D33 = 9'b000110010;
localparam D34 = 9'b000110110;
localparam D35 = 9'b000110111;
localparam D36 = 9'b000110101;
localparam D37 = 9'b000110100;
localparam D38 = 9'b000111100;
localparam D39 = 9'b000111101;
localparam D40 = 9'b000111111;
localparam D41 = 9'b000111110;
localparam D42 = 9'b000111010;
localparam D43 = 9'b000111011;
localparam D44 = 9'b000111001;
localparam D45 = 9'b000111000;
localparam D46 = 9'b000101000;
localparam D47 = 9'b000101001;
localparam D48 = 9'b000101011;
localparam D49 = 9'b000101010;
localparam D50 = 9'b000101110;
localparam D51 = 9'b000101111;
localparam D52 = 9'b000101101;
localparam D53 = 9'b000101100;
localparam D54 = 9'b000100100;
localparam D55 = 9'b000100101;
localparam D56 = 9'b000100111;
localparam D57 = 9'b000100110;
localparam D58 = 9'b000100010;
localparam D59 = 9'b000100011;
localparam D60 = 9'b000100001;
localparam D61 = 9'b000100000;
localparam D62 = 9'b001100000;
localparam D63 = 9'b001100001;
localparam D64 = 9'b001100011;
localparam D65 = 9'b001100010;
localparam D66 = 9'b001100110;
localparam D67 = 9'b001100111;
localparam D68 = 9'b001100101;
localparam D69 = 9'b001100100;
localparam D70 = 9'b001101100;
localparam D71 = 9'b001101101;
localparam D72 = 9'b001101111;
localparam D73 = 9'b001101110;
localparam D74 = 9'b001101010;
localparam D75 = 9'b001101011;
localparam D76 = 9'b001101001;
localparam D77 = 9'b001101000;
localparam D78 = 9'b001111000;
localparam D79 = 9'b001111001;
localparam D80 = 9'b001111011;
localparam D81 = 9'b001111010;
localparam D82 = 9'b001111110;
localparam D83 = 9'b001111111;
localparam D84 = 9'b001111101;
localparam D85 = 9'b001111100;
localparam D86 = 9'b001110100;
localparam D87 = 9'b001110101;
localparam D88 = 9'b001110111;
localparam D89 = 9'b001110110;
localparam D90 = 9'b001110010;
localparam D91 = 9'b001110011;
localparam D92 = 9'b001110001;
localparam D93 = 9'b001110000;
localparam D94 = 9'b001010000;
localparam D95 = 9'b001010001;
localparam D96 = 9'b001010011;
localparam D97 = 9'b001010010;
localparam D98 = 9'b001010110;
localparam D99 = 9'b001010111;
localparam D100 = 9'b001010101;
localparam D101 = 9'b001010100;
localparam D102 = 9'b001011100;
localparam D103 = 9'b001011101;
localparam D104 = 9'b001011111;
localparam D105 = 9'b001011110;
localparam D106 = 9'b001011010;
localparam D107 = 9'b001011011;
localparam D108 = 9'b001011001;
localparam D109 = 9'b001011000;
localparam D110 = 9'b001001000;
localparam D111 = 9'b001001001;
localparam D112 = 9'b001001011;
localparam D113 = 9'b001001010;
localparam D114 = 9'b001001110;
localparam D115 = 9'b001001111;
localparam D116 = 9'b001001101;
localparam D117 = 9'b001001100;
localparam D118 = 9'b001000100;
localparam D119 = 9'b001000101;
localparam D120 = 9'b001000111;
localparam D121 = 9'b001000110;
localparam D122 = 9'b001000010;
localparam D123 = 9'b001000011;
localparam D124 = 9'b001000001;
localparam D125 = 9'b001000000;
localparam D126 = 9'b011000000;
localparam D127 = 9'b011000001;
localparam STOP = 9'b011000011;//发送结束
//从ROM中读取需要发送的数据
reg [6:0]ROM_addr=0;//ROM访问地址
wire [63:0]ROM_data;//ROM输出数据
blk_mem_gen_0 rom(
.clka(sys_clk), // input wire clka
.addra(ROM_addr), // input wire [6 : 0] addra
.douta(ROM_data) // output wire [63 : 0] douta
);
//状泰寄存器
reg [8:0] cstate,nstate=0;
reg [31:0]reset_cnt=0;//复位控制计数�??
reg rst_n=0;
//上电复位逻辑
always @(posedge sys_clk) begin
if(reset_cnt >= 30000)
reset_cnt <= 30000;
else
reset_cnt <= reset_cnt + 1;
end
always @(posedge sys_clk) begin
if(reset_cnt == 10)begin
res <= 1;
rst_n <= 1;
end
else if(reset_cnt == 10000)begin
res <= 0;
rst_n <= 0;
end
else if(reset_cnt == 20000)begin
res <= 1;
rst_n <= rst_n;
end
else if(reset_cnt == 30000)begin
res <= res;
rst_n <= 1;
end
else begin
res <= res;
rst_n <= rst_n;
end
end
//SPI主机例化
reg SPI_send=0;//SPI发�?�使能信�??
reg [7:0] SPI_data=0;//SPI�??要发送的字节数据
wire SPI_done;//SPI发�?�完成标�??
reg DC_in=0;//数据/命令控制�??
SPI_Master SPI_Master_(
.sys_clk (sys_clk),
.rst_n(1'b1),
.SPI_send (SPI_send),
.SPI_data (SPI_data),
.DC_in (DC_in),
.DC_out (DC),
.sclk (sclk),
.MOSI (MOSI),
.CS (CS),
.SPI_done (SPI_done),
.sck (sck)
);
//OLED初始化模块实例化
wire SPI_send_init;
wire DC_init;
wire [7:0] SPI_data_init;
wire initial_done;
OLED_initial OLED_initial_(
.clk (sclk),
.rst_n (rst_n),
.SPI_done (SPI_done),
.DC (DC_init),
.initial_done (initial_done),
.SPI_send (SPI_send_init),
.SPI_data (SPI_data_init)
);
//OLED写信号模块实例化,讲输入的64位向量拆分发送
reg [6:0]set_pos_x=0;//列的索引 0->127
reg [2:0]set_pos_y=0;//PAGE的索引 0->7
wire write_en;
wire DC_write;
wire write_done;
reg [63:0]write_data=0;
wire SPI_send_write;
wire [7:0] SPI_data_write;
assign write_en = (cstate==INIT || cstate == CLR || cstate == STOP)?0:1;
OLED_write_data OLED_write_(
.clk (sclk),
.rst_n (rst_n),
.write_en (write_en),
.SPI_done (SPI_done),
.write_data (write_data),
.set_pos_x (set_pos_x),
.set_pos_y (set_pos_y),
.DC (DC_write),
.write_done (write_done),
.SPI_send (SPI_send_write),
.SPI_data (SPI_data_write)
);
//OLED清屏模块实例化
wire clear_en;
wire DC_clear;
wire clear_done;
wire SPI_send_clear;
wire [7:0]SPI_data_clear;
assign clear_en = (cstate==CLR)?1:0;
OLED_clear OLED_clear_(
.clk (sclk),
.rst_n (rst_n),
.clear_en (clear_en),
.SPI_done (SPI_done),
.DC (DC_clear),
.clear_done (clear_done),
.SPI_send (SPI_send_clear),
.SPI_data (SPI_data_clear)
);
//状态转移同步逻辑
always @(posedge sclk) begin
if(!rst_n)begin
cstate <= INIT;
end
else begin
cstate <= nstate;
end
end
//产生下一个状态组合逻辑
always @(*) begin
case(cstate)
INIT:nstate = initial_done?CLR:INIT;
CLR :nstate = clear_done?D0:CLR;
D0:nstate = write_done?D1:D0;
D1:nstate = write_done?D2:D1;
D2:nstate = write_done?D3:D2;
D3:nstate = write_done?D4:D3;
D4:nstate = write_done?D5:D4;
D5:nstate = write_done?D6:D5;
D6:nstate = write_done?D7:D6;
D7:nstate = write_done?D8:D7;
D8:nstate = write_done?D9:D8;
D9:nstate = write_done?D10:D9;
D10:nstate = write_done?D11:D10;
D11:nstate = write_done?D12:D11;
D12:nstate = write_done?D13:D12;
D13:nstate = write_done?D14:D13;
D14:nstate = write_done?D15:D14;
D15:nstate = write_done?D16:D15;
D16:nstate = write_done?D17:D16;
D17:nstate = write_done?D18:D17;
D18:nstate = write_done?D19:D18;
D19:nstate = write_done?D20:D19;
D20:nstate = write_done?D21:D20;
D21:nstate = write_done?D22:D21;
D22:nstate = write_done?D23:D22;
D23:nstate = write_done?D24:D23;
D24:nstate = write_done?D25:D24;
D25:nstate = write_done?D26:D25;
D26:nstate = write_done?D27:D26;
D27:nstate = write_done?D28:D27;
D28:nstate = write_done?D29:D28;
D29:nstate = write_done?D30:D29;
D30:nstate = write_done?D31:D30;
D31:nstate = write_done?D32:D31;
D32:nstate = write_done?D33:D32;
D33:nstate = write_done?D34:D33;
D34:nstate = write_done?D35:D34;
D35:nstate = write_done?D36:D35;
D36:nstate = write_done?D37:D36;
D37:nstate = write_done?D38:D37;
D38:nstate = write_done?D39:D38;
D39:nstate = write_done?D40:D39;
D40:nstate = write_done?D41:D40;
D41:nstate = write_done?D42:D41;
D42:nstate = write_done?D43:D42;
D43:nstate = write_done?D44:D43;
D44:nstate = write_done?D45:D44;
D45:nstate = write_done?D46:D45;
D46:nstate = write_done?D47:D46;
D47:nstate = write_done?D48:D47;
D48:nstate = write_done?D49:D48;
D49:nstate = write_done?D50:D49;
D50:nstate = write_done?D51:D50;
D51:nstate = write_done?D52:D51;
D52:nstate = write_done?D53:D52;
D53:nstate = write_done?D54:D53;
D54:nstate = write_done?D55:D54;
D55:nstate = write_done?D56:D55;
D56:nstate = write_done?D57:D56;
D57:nstate = write_done?D58:D57;
D58:nstate = write_done?D59:D58;
D59:nstate = write_done?D60:D59;
D60:nstate = write_done?D61:D60;
D61:nstate = write_done?D62:D61;
D62:nstate = write_done?D63:D62;
D63:nstate = write_done?D64:D63;
D64:nstate = write_done?D65:D64;
D65:nstate = write_done?D66:D65;
D66:nstate = write_done?D67:D66;
D67:nstate = write_done?D68:D67;
D68:nstate = write_done?D69:D68;
D69:nstate = write_done?D70:D69;
D70:nstate = write_done?D71:D70;
D71:nstate = write_done?D72:D71;
D72:nstate = write_done?D73:D72;
D73:nstate = write_done?D74:D73;
D74:nstate = write_done?D75:D74;
D75:nstate = write_done?D76:D75;
D76:nstate = write_done?D77:D76;
D77:nstate = write_done?D78:D77;
D78:nstate = write_done?D79:D78;
D79:nstate = write_done?D80:D79;
D80:nstate = write_done?D81:D80;
D81:nstate = write_done?D82:D81;
D82:nstate = write_done?D83:D82;
D83:nstate = write_done?D84:D83;
D84:nstate = write_done?D85:D84;
D85:nstate = write_done?D86:D85;
D86:nstate = write_done?D87:D86;
D87:nstate = write_done?D88:D87;
D88:nstate = write_done?D89:D88;
D89:nstate = write_done?D90:D89;
D90:nstate = write_done?D91:D90;
D91:nstate = write_done?D92:D91;
D92:nstate = write_done?D93:D92;
D93:nstate = write_done?D94:D93;
D94:nstate = write_done?D95:D94;
D95:nstate = write_done?D96:D95;
D96:nstate = write_done?D97:D96;
D97:nstate = write_done?D98:D97;
D98:nstate = write_done?D99:D98;
D99:nstate = write_done?D100:D99;
D100:nstate = write_done?D101:D100;
D101:nstate = write_done?D102:D101;
D102:nstate = write_done?D103:D102;
D103:nstate = write_done?D104:D103;
D104:nstate = write_done?D105:D104;
D105:nstate = write_done?D106:D105;
D106:nstate = write_done?D107:D106;
D107:nstate = write_done?D108:D107;
D108:nstate = write_done?D109:D108;
D109:nstate = write_done?D110:D109;
D110:nstate = write_done?D111:D110;
D111:nstate = write_done?D112:D111;
D112:nstate = write_done?D113:D112;
D113:nstate = write_done?D114:D113;
D114:nstate = write_done?D115:D114;
D115:nstate = write_done?D116:D115;
D116:nstate = write_done?D117:D116;
D117:nstate = write_done?D118:D117;
D118:nstate = write_done?D119:D118;
D119:nstate = write_done?D120:D119;
D120:nstate = write_done?D121:D120;
D121:nstate = write_done?D122:D121;
D122:nstate = write_done?D123:D122;
D123:nstate = write_done?D124:D123;
D124:nstate = write_done?D125:D124;
D125:nstate = write_done?D126:D125;
D126:nstate = write_done?D127:D126;
D127:nstate = write_done?STOP:D127;
STOP:nstate = sys_rst_n?STOP:INIT;
default:nstate = INIT;
endcase
end
//根据状态提供相应的输出
wire PAGE_inc_flag = (&set_pos_x)?1:0;
always @(*) begin
if(!rst_n)begin
set_pos_x = 0;
set_pos_y = 0;
write_data= 64'd0;
end
else begin
case (cstate)
//PAGE0
D0:begin
set_pos_x = 0;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 0;
end
D1:begin
set_pos_x = 8;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 1;
end
D2:begin
set_pos_x = 16;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 2;
end
D3:begin
set_pos_x = 24;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 3;
end
D4:begin
set_pos_x = 32;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 4;
end
D5:begin
set_pos_x = 40;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 5;
end
D6:begin
set_pos_x = 48;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 6;
end
D7:begin
set_pos_x = 56;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 7;
end
D8:begin
set_pos_x = 64;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 8;
end
D9:begin
set_pos_x = 72;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 9;
end
D10:begin
set_pos_x = 80;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 10;
end
D11:begin
set_pos_x = 88;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 11;
end
D12:begin
set_pos_x = 96;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 12;
end
D13:begin
set_pos_x = 104;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 13;
end
D14:begin
set_pos_x = 112;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 14;
end
D15:begin
set_pos_x = 120;
set_pos_y = 0;
write_data = ROM_data;
ROM_addr = 15;
end
//PAGE1
D16:begin
set_pos_x = 0;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 16;
end
D17:begin
set_pos_x = 8;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 17;
end
D18:begin
set_pos_x = 16;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 18;
end
D19:begin
set_pos_x = 24;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 19;
end
D20:begin
set_pos_x = 32;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 20;
end
D21:begin
set_pos_x = 40;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 21;
end
D22:begin
set_pos_x = 48;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 22;
end
D23:begin
set_pos_x = 56;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 23;
end
D24:begin
set_pos_x = 64;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 24;
end
D25:begin
set_pos_x = 72;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 25;
end
D26:begin
set_pos_x = 80;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 26;
end
D27:begin
set_pos_x = 88;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 27;
end
D28:begin
set_pos_x = 96;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 28;
end
D29:begin
set_pos_x = 104;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 29;
end
D30:begin
set_pos_x = 112;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 30;
end
D31:begin
set_pos_x = 120;
set_pos_y = 1;
write_data = ROM_data;
ROM_addr = 31;
end
//PAGE2
D32:begin
set_pos_x = 0;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 32;
end
D33:begin
set_pos_x = 8;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 33;
end
D34:begin
set_pos_x = 16;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 34;
end
D35:begin
set_pos_x = 24;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 35;
end
D36:begin
set_pos_x = 32;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 36;
end
D37:begin
set_pos_x = 40;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 37;
end
D38:begin
set_pos_x = 48;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 38;
end
D39:begin
set_pos_x = 56;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 39;
end
D40:begin
set_pos_x = 64;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 40;
end
D41:begin
set_pos_x = 72;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 41;
end
D42:begin
set_pos_x = 80;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 42;
end
D43:begin
set_pos_x = 88;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 43;
end
D44:begin
set_pos_x = 96;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 44;
end
D45:begin
set_pos_x = 104;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 45;
end
D46:begin
set_pos_x = 112;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 46;
end
D47:begin
set_pos_x = 120;
set_pos_y = 2;
write_data = ROM_data;
ROM_addr = 47;
end
//PAGE3
D48:begin
set_pos_x = 0;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 48;
end
D49:begin
set_pos_x = 8;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 49;
end
D50:begin
set_pos_x = 16;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 50;
end
D51:begin
set_pos_x = 24;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 51;
end
D52:begin
set_pos_x = 32;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 52;
end
D53:begin
set_pos_x = 40;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 53;
end
D54:begin
set_pos_x = 48;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 54;
end
D55:begin
set_pos_x = 56;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 55;
end
D56:begin
set_pos_x = 64;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 56;
end
D57:begin
set_pos_x = 72;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 57;
end
D58:begin
set_pos_x = 80;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 58;
end
D59:begin
set_pos_x = 88;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 59;
end
D60:begin
set_pos_x = 96;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 60;
end
D61:begin
set_pos_x = 104;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 61;
end
D62:begin
set_pos_x = 112;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 62;
end
D63:begin
set_pos_x = 120;
set_pos_y = 3;
write_data = ROM_data;
ROM_addr = 63;
end
//PAGE4
D64:begin
set_pos_x = 0;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 64;
end
D65:begin
set_pos_x = 8;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 65;
end
D66:begin
set_pos_x = 16;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 66;
end
D67:begin
set_pos_x = 24;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 67;
end
D68:begin
set_pos_x = 32;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 68;
end
D69:begin
set_pos_x = 40;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 69;
end
D70:begin
set_pos_x = 48;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 70;
end
D71:begin
set_pos_x = 56;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 71;
end
D72:begin
set_pos_x = 64;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 72;
end
D73:begin
set_pos_x = 72;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 73;
end
D74:begin
set_pos_x = 80;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 74;
end
D75:begin
set_pos_x = 88;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 75;
end
D76:begin
set_pos_x = 96;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 76;
end
D77:begin
set_pos_x = 104;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 77;
end
D78:begin
set_pos_x = 112;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 78;
end
D79:begin
set_pos_x = 120;
set_pos_y = 4;
write_data = ROM_data;
ROM_addr = 79;
end
//PAGGE5
D80:begin
set_pos_x = 0;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 80;
end
D81:begin
set_pos_x = 8;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 81;
end
D82:begin
set_pos_x = 16;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 82;
end
D83:begin
set_pos_x = 24;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 83;
end
D84:begin
set_pos_x = 32;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 84;
end
D85:begin
set_pos_x = 40;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 85;
end
D86:begin
set_pos_x = 48;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 86;
end
D87:begin
set_pos_x = 56;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 87;
end
D88:begin
set_pos_x = 64;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 88;
end
D89:begin
set_pos_x = 72;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 89;
end
D90:begin
set_pos_x = 80;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 90;
end
D91:begin
set_pos_x = 88;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 91;
end
D92:begin
set_pos_x = 96;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 92;
end
D93:begin
set_pos_x = 104;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 93;
end
D94:begin
set_pos_x = 112;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 94;
end
D95:begin
set_pos_x = 120;
set_pos_y = 5;
write_data = ROM_data;
ROM_addr = 95;
end
//PAGE6
D96:begin
set_pos_x = 0;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 96;
end
D97:begin
set_pos_x = 8;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 97;
end
D98:begin
set_pos_x = 16;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 98;
end
D99:begin
set_pos_x = 24;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 99;
end
D100:begin
set_pos_x = 32;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 100;
end
D101:begin
set_pos_x = 40;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 101;
end
D102:begin
set_pos_x = 48;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 102;
end
D103:begin
set_pos_x = 56;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 103;
end
D104:begin
set_pos_x = 64;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 104;
end
D105:begin
set_pos_x = 72;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 105;
end
D106:begin
set_pos_x = 80;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 106;
end
D107:begin
set_pos_x = 88;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 107;
end
D108:begin
set_pos_x = 96;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 108;
end
D109:begin
set_pos_x = 104;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 109;
end
D110:begin
set_pos_x = 112;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 110;
end
D111:begin
set_pos_x = 120;
set_pos_y = 6;
write_data = ROM_data;
ROM_addr = 111;
end
//PAGE7
D112:begin
set_pos_x = 0;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 112;
end
D113:begin
set_pos_x = 8;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 113;
end
D114:begin
set_pos_x = 16;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 114;
end
D115:begin
set_pos_x = 24;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 115;
end
D116:begin
set_pos_x = 32;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 116;
end
D117:begin
set_pos_x = 40;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 117;
end
D118:begin
set_pos_x = 48;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 118;
end
D119:begin
set_pos_x = 56;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 119;
end
D120:begin
set_pos_x = 64;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 120;
end
D121:begin
set_pos_x = 72;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 121;
end
D122:begin
set_pos_x = 80;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 122;
end
D123:begin
set_pos_x = 88;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 123;
end
D124:begin
set_pos_x = 96;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 124;
end
D125:begin
set_pos_x = 104;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 125;
end
D126:begin
set_pos_x = 112;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 126;
end
D127:begin
set_pos_x = 120;
set_pos_y = 7;
write_data = ROM_data;
ROM_addr = 127;
end
default: begin
set_pos_x = 0;
set_pos_y = 0;
write_data= 64'd0;
end
endcase
end
end
//初始化写使能、发送的数据控制
always @(*) begin
if(!rst_n)begin
DC_in = 0;
SPI_data = 0;
SPI_send = 0;
end
else begin
case(cstate)
INIT:begin
DC_in = DC_init;
SPI_data = SPI_data_init;
SPI_send = SPI_send_init;
end
CLR:begin
DC_in = DC_clear;
SPI_data = SPI_data_clear;
SPI_send = SPI_send_clear;
end
D0,D1,D2,D3,D4,D5,D6,D7,D8,D9,
D10,D11,D12,D13,D14,D15,D16,D17,D18,D19,
D20,D21,D22,D23,D24,D25,D26,D27,D28,D29,
D30,D31,D32,D33,D34,D35,D36,D37,D38,D39,
D40,D41,D42,D43,D44,D45,D46,D47,D48,D49,
D50,D51,D52,D53,D54,D55,D56,D57,D58,D59,
D60,D61,D62,D63,D64,D65,D66,D67,D68,D69,
D70,D71,D72,D73,D74,D75,D76,D77,D78,D79,
D80,D81,D82,D83,D84,D85,D86,D87,D88,D89,
D90,D91,D92,D93,D94,D95,D96,D97,D98,D99,
D100,D101,D102,D103,D104,D105,D106,D107,D108,D109,
D110,D111,D112,D113,D114,D115,D116,D117,D118,D119,
D120,D121,D122,D123,D124,D125,D126,D127:begin
DC_in = DC_write;
SPI_data = SPI_data_write;
SPI_send = SPI_send_write;
end
default:begin
DC_in = 0;
SPI_data = 0;
SPI_send = 0;
end
endcase
end
end
endmodule
五、仿真结果
初始化

清屏后发送数据

testbench:
module top_tb;
// Ports
reg sys_clk = 0;
reg sys_rst_n = 0;
wire sclk;
wire sck;
wire res;
wire MOSI;
wire CS;
wire DC;
top top_dut(
.sys_clk(sys_clk),
.sys_rst_n(sys_rst_n),
.sclk(sclk),
.sck(sck),
.res(res),
.MOSI(MOSI),
.CS(CS),
.DC(DC)
);
initial begin
begin
#10000;
sys_rst_n = 1;
// $finish;
end
end
always #5 sys_clk = ! sys_clk ;
endmodule
六、板级验证
