【目标跟踪】多相机多目标跟踪
文章目录
-
- 前言
- 一、计算思路
- 二、代码
- 三、结果
前言
- 单相机目标跟踪之前博客已经有过基本介绍,本篇博客主要介绍一种多相机目标跟踪的计算方法
- 已知各相机内外参,如何计算共视区域像素投影?废话不多说,见下图。
同一时刻相机A与相机B的图
相机A

相机B

问:相机 A 检测出目标1 box位置,如何计算得出目标1在相机 B 中像素的位置?
一、计算思路
- 取相机 A 目标1中一个像素点 (Ua, Va)
- 计算改点在相机A中的相机坐标系坐标 (Xa,Ya,Za)
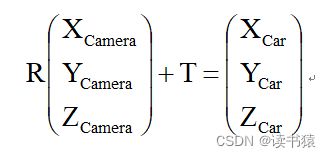
- 相机 A 坐标转化到相机 B 下的相机坐标 (Xb,Yb,Zb)
- (Xb,Yb,Zb) 转化到像素坐标 (Ub,Vb)
第2点与第3点中像素坐标转化到相机坐标。
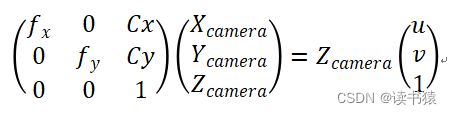
其中Zcamera 可以近似求出。看过之前博客的朋友应该可以明白,具体计算方式,代码会全部给出。
第3点就是一个三维坐标系旋转平移变化。
二、代码
import yaml
import numpy as np
import cv2
def read_yaml(path):
with open(path, 'r', encoding='utf-8') as f:
result = yaml.load(f.read(), Loader=yaml.FullLoader)
return result
def get_r_t_mtx(path, f_r_b_l):
sensor_list = ["front_center", "right_center", "back_center", "left_center"]
yaml_result = read_yaml(path) # 读取yaml配置文件h
res_pitch = yaml_result[sensor_list[f_r_b_l]]["pitch"]
res_h = yaml_result[sensor_list[f_r_b_l]]["height"]
res_r = np.array(yaml_result[sensor_list[f_r_b_l]]["rotation"]).reshape(3, 3)
res_t = np.array(yaml_result[sensor_list[f_r_b_l]]["translation"]).reshape(3, 1)
res_mtx = np.array(yaml_result[sensor_list[f_r_b_l]]["K"]).reshape(3, 3)
return res_pitch, res_h, res_mtx, res_r, res_t
# 近似计算相机坐标系 Zcamera
def get_camera_z(children, pixe_y):
pitch, h, K, *_ = children
sigma = np.arctan((pixe_y - K[1][2]) / K[1][1])
z = h * np.cos(sigma) / np.sin(sigma + pitch) # 深度
return z
def get_sensor_pixe(children, parent, x, y, distance):
r, t = get_two_camera_r_t(children, parent)
children_pitch, children_h, children_mtx, *c = children
parent_pitch, parent_h, parent_mtx, *p = parent
distance_init = distance
x = (x - children_mtx[0][2]) / children_mtx[0][0]
y = (y - children_mtx[1][2]) / children_mtx[1][1]
coor = np.array([x, y, 1]).reshape(3, 1) * distance_init
res_coor = r @ coor + t # 车体坐标系
res_x = (res_coor[0] / res_coor[2]) * parent_mtx[0][0] + parent_mtx[0][2]
res_y = (res_coor[1] / res_coor[2]) * parent_mtx[1][1] + parent_mtx[1][2]
return res_x, res_y
def show_img(img):
cv2.namedWindow("show")
cv2.imshow("show", img)
cv2.waitKey(0)
def get_two_camera_r_t(children, parent):
*children, children_mtx, children_r, children_t = children
*parent, parent_mtx, parent_r, parent_t = parent
res_r = np.array(parent_r).T @ np.array(children_r)
res_t = np.array(parent_r).T @ (np.array(children_t) - np.array(parent_t)).reshape(3, 1)
return res_r, res_t
def get_uv(point, param):
*p, mtx, r, t = param
coor_camera = r.T @ (np.array(point).reshape(3, 1) - t)
coor_pixe = mtx @ coor_camera * (1 / coor_camera[2])
return coor_pixe[0][0], coor_pixe[1][0]
if __name__ == '__main__':
front_img = cv2.imread("front_img.jpg")
left_img = cv2.imread("left_img.jpg")
img = np.concatenate((left_img, front_img), axis=1) # 横向拼接
front_param = get_r_t_mtx("./sensor_param.yaml", 0)
left_param = get_r_t_mtx("./sensor_param.yaml", 3)
color = np.random.randint(0, 255, (3000, 3)) # 随机颜色
car_coor = [5.41, 6.5, 1.3]
camera1 = np.ravel(get_uv(car_coor, left_param))
camera2 = np.ravel(get_uv(car_coor, front_param))
print(camera1, camera2)
cv2.circle(img, (int(camera1[0]), int(camera1[1])), 1, color[0].tolist(), 2)
cv2.circle(img, (int(camera2[0]) + 1920, int(camera2[1])), 1, color[1].tolist(), 2)
cv2.line(img, (int(camera1[0]), int(camera1[1])), (int(camera2[0] + 1920), int(camera2[1])), color[0].tolist(), 2)
show_img(img)
# print(get_two_camera_r_t(front_param, left_param))
# print(front_to_left_r.reshape(-1), "\n", front_to_left_t)
# distance = get_camera_z(left_param, 640)
# x1, y1 = 1429, 488
# x2, y2 = 1509, 637
# for x in range(x1, x2, 20):
# for y in range(y1, y2, 20):
# res_x, res_y = get_sensor_pixe(left_param, front_param, x, y, distance)
# cv2.circle(img, (int(x), int(y)), 1, color[x].tolist(), 5)
# cv2.circle(img, (int(res_x) + 1920, int(res_y)), 1, color[x].tolist(), 5)
# cv2.line(img, (int(x) , int(y)), (int(res_x)+ 1920, int(res_y)), color[x].tolist(), 2)
# distance = get_camera_z(front_param, 649)
# x1, y1 = 271, 469
# x2, y2 = 353, 649
# for x in range(x1, x2, 20):
# for y in range(y1, y2, 20):
# res_x, res_y = get_sensor_pixe(front_param, left_param, x, y, distance)
# cv2.circle(img, (int(x) + 1920, int(y)), 1, color[x].tolist(), 2)
# cv2.circle(img, (int(res_x), int(res_y)), 1, color[x].tolist(), 2)
# cv2.line(img, (int(x) + 1920, int(y)), (int(res_x), int(res_y)), color[x].tolist(), 2)
# show_img(img)