STM32---基本定时器(含源码)小白可入
写在前面:定时器是STM32中一个十分重要的外设,并且在STM32中具有多个定时器。定时器的包括基本定时器、通用定时器以及高级控制定时器,这些定时器相关独立,不共享任何资源。当然,其难易程度也是逐渐增加的,我们当然是从简答的开始学习。本节就学习基本定时器。
一、定时器概述
1.1软件延时原理
定时器的一个设计初衷就是为了延时,而我们前面学习过使用软件延时;例如下面这段代码:
void Delay1us() //@11.0592MHz
{
_nop_();
_nop_();
_nop_();
}其作用就是使晶振为11.0529Mhz的51单片机延时1微秒,它是如何进行延时的呢?是因为对于单片机来说,运行每一条程序都是需要一定的时间的,那么执行一定长度的没有实际作用的代码就能够延时CPU的一些时间,这就是软件延时的原理。
但是这种延时方式具有一些缺点,最明显的就是:延时时间不准确以及CPU死等;
1.2定时器定时原理
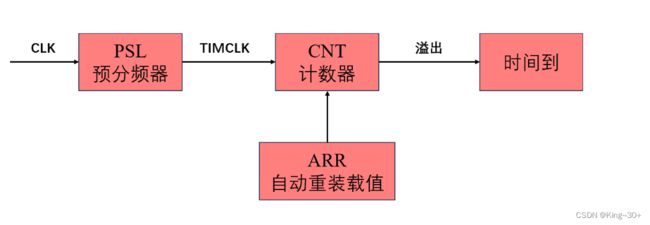
使用精确的时基,通过硬件的方式,实现定时功能,其核心是:计数器。与前面学习的看门狗有一定的相似之处。
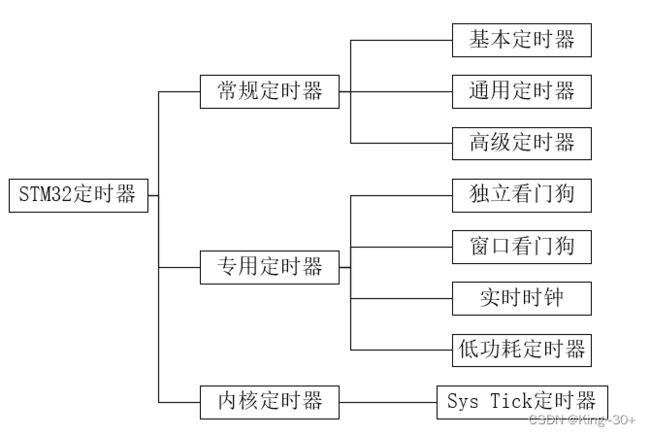
1.3定时器分类
1.4STM32定时器特性
| 类型 | 名称 | 计数器类型 | 预分频系数 | 能否产生DMA请求 | 功能区别 |
| 基本定时器 | TIM6 TIM6 |
递增 | 1-65536 | 可以 | 没有输出通道,常用作时基,即定时功能。 |
| 通用定时器 | TIM2 TIM3 TIM4 TIM5 |
递增 递减 中央对齐 |
1-65536 | 可以 | 具有多路通路,可以用于输入捕获/输出比较,也可以做时基。 |
| 高级定时器 | TIM1 TIM8 |
递增 递减 中央对齐 |
1-65536 | 可以 | 除了具备通用定时器所有功能外,还具备带死区控制的互补信号输出、刹车等功能。 |
二、基本定时器
2.1基本定时器介绍
基本定时器:TIM6\TIM7;
特性:16位递增计数器,计数值:0-65535;
16位预分频系数,分频系数:1-65536;
可用于触发DAC,在更新时间下可产生中断/DMA;
2.2基本框图

1、时钟源
定时器的核心在于计数,首先需要给一个时钟源。基本定时器的时钟挂载在APB1总线上,所以它的时钟来自于APB1总线,但是基本定时器时钟不是直接APB1总线直接提供,而是先经过一个倍频器,当 APB1 的预分频器系数为 1 时,这个倍频器系数为 1, 即定时器的时钟频率等于 APB1 总线时钟频率;当 APB1 的预分频器系数≥2 分频时,这个倍频器系数就为 2 , 即定时器 的 时钟频率等于APB1总线时钟频率的两倍 。APB1 总线的预分频器分频系数是 2,所以挂载在 APB1 总线的定时器时钟频率为 72Mhz。
2、控制器
控制器除了控制定时器复位、使能、计数等功能之外,还可以用于触发 DAC 转换。
3、时基单元
时基单元包括:计数器寄存器(TIMx_CNT)、预分频器寄存器(TIMx_PSC)、自动重载寄存器 (TIMx_ARR) 。基本定时器的这三个寄存器都是 16 位有效数字,即可设置值范围是 0~65535。
预分频器 PSC
有一个输入和一个输出。输入CK_PSC来源于控制器部分,实际上就是来自于内部时钟(CK_INT),即 2 倍的 APB1 总线时钟频率(72MHz)。
输出CK_CNT 是分频后的时钟,它是计数器实际的计数时钟,通过设置预分频器寄存器(TIMx_PSC)的值可以得到不同频率 CK_CNT。
fCK_CNT= fCK_PSC / (PSC[15:0]+1);
其中,PSC[15:0]是写入预分频器寄存器的值。
自动重载寄存器(TIMx_ARR)
自动重载寄存器的值是由用户自行定义的,它的值设定后,作为一个评判标准同CNT计数器的值进行比较,从而判断是否溢出,是否产生对应的响应。它是作为溢出条件的重要组成部分。
计数器寄存器(TIMx_CNT)
基本定时器的计数器是一个递增的计数器,当寄存器(TIMx_CR1)的 CEN 位置 1,即使能定时器,每来一个 CK_CNT 脉冲,TIMx_CNT 的值就会递增加 1。当 TIMx_CNT 值 与 TIMx_ARR 的设定值相等时,TIMx_CNT 的值就会被自动清零并且会生成更新事件,然后下一个 CK_CNT 脉冲到来,TIMx_CNT 的值就会递增加 1,如此循环。在此过程中,TIMx_CNT 等于 TIMx_ARR(溢出条件) 时,我们称之为定时器溢出,因为是递增计数,故而又称为定时器上溢。定时器溢出就伴随着更新事件的发生。
影子寄存器
在上述基本框图中,我们可以看见,在预分频器 PSC与自动重载寄存器(TIMx_ARR)的背后各含有一个影子寄存器,影子寄存器是一个实际起作用的寄存器,不可直接访问。
举个例子:我们可以把预分频系数写入预分频器寄存器(TIMx_PSC), 但是预分频器寄存器只是起到缓存数据的作用,只有等到更新事件发生时,预分频器寄存器的值才会被自动写入其影子寄存器中,这时才真正起作用。
更新事件
更新事件的产生有两种情况,一是由软件产生,将 TIMx_EGR 寄存器的位 UG 置 1,产生更新事件后,硬件会自动将 UG 位清零。二是由硬件产生,满足以下条件即可: 计数器的值等于自动重装载寄存器影子寄存器的值。
2.3定时器计数模式
| 计数模式 | 条件 |
| 递增 | CNT==ARR(影子) |
| 递减 | CNT==0 |
| 中心对齐 | CNT==ARR(影子)-1 CNT==1 |

三、定时器相关寄存器
3.1控制寄存器 1(TIMx_CR1)

该寄存器,我们需要注意的是:位 0(CEN)用于使能或者禁止计数器,该位置 1 计数器 开始工作,置 0 则停止。还有位 7(APRE)用于控制自动重载寄存器 ARR 是否具有缓冲作用, 如果 ARPE 位置 1,ARR 起缓冲作用,即只有在更新事件发生时才会把 ARR 的值写入其影子寄存器里;如果 ARPE 位置 0,那么修改自动重载寄存器的值时,该值会马上被写入其影子寄存器中,从而立即生效。
3.2中断使能寄存器(TIMx_DIER)
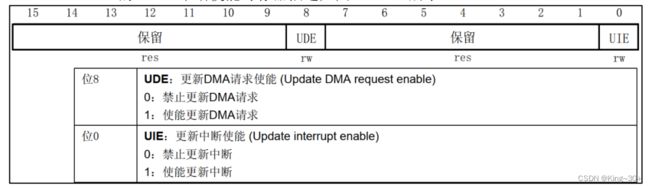
该寄存器位 0(UIE)用于使能或者禁止更新中断,因为本实验我们用到中断,所以该位需要置 1。位 8(UDE)用于使能或者禁止更新 DMA 请求,我们暂且用不到,置 0 即可。
3.3状态寄存器(TIMx_SR)

该寄存器位 0(UIF)是中断更新的标志位,当发生中断时由硬件置 1,然后就会执行中断服务函数,需要软件去清零,所以我们必须在中断服务函数里把该位清零。如果中断到来后,不把该位清零,那么系统就会一直进入中断服务函数,这显然不是我们想要的。
3.4计数器(TIMx_CNT)

用于设定计数器的值;
3.5预分频器(TIMx_PSC)

用于设定预分频器的值;
3.6自动重装载寄存器(TIMx_ARR)

用于设定自动重装载寄存器的值。
3.7定时器溢出时间计算
计算公式:
Tput=(ARR+1)*(PSC+1)/Ft
其中:Ft为时钟源频率;ARR为自动重装载值;PSC为预分频器值;
例如:我们需要一个 500ms 周期的定时器更新中断,一般思路是先设置预分频寄存器,然后才是自动重载寄存器。考虑到我们设置的 CK_INT 为 72MHz,我们把预分频系数设置为 7200,即写入预分频寄存器的值为 7199,那么 fCK_CNT=72MHz/7200=10KHz。这 样就得到计数器的计数频率为 10KHz,即计数器 1 秒钟可以计 10000 个数。我们需要 500ms 的 中断周期,所以我们让计数器计数 5000 个数就能满足要求,即需要设置自动重载寄存器的值为 4999,另外还要把定时器更新中断使能位 UIE 置 1,CEN 位也要置 1。
四、实验配置步骤与相关库函数
4.1配置步骤
1、配置定时器基础工作参数:HAL_TIM_Base_Init()
2、定时器基础Msp初始化函数:HAL_TIM_Base_MspInit()
3、使能更新中断并启动计数器:HAL_TIM_Base_Start_IT()
4、设置中断优先级并使能中断:HAL_NVIC_SetPriority、HAL_NVIC EnablePQ()
5、编写中断服务函数:TIMx_IPQHandler()----HAL_TIM_IPQHandler()
6、编写定时器更新中断服务函数:HAL_TIM_Periodlapsed Callback()
4.2相关库函数
HAL_TIM_Base_Init 函数
HAL_StatusTypeDef HAL_TIM_Base_Init(TIM_HandleTypeDef *htim);
形参 1 是 TIM_HandleTypeDef 结构体类型指针变量(亦称定时器句柄);
其中主要关注:
Instance:指向定时器寄存器基地址。
TIM_Base_InitTypeDef:
1)Prescaler:预分频系数,即写入预分频寄存器的值,范围 0 到 65535。
2)CounterMode:计数器计数模式,这里基本定时器只能向上计数。
3)Period:自动重载值,即写入自动重载寄存器的值,范围 0 到 65535。
4)ClockDivision:时钟分频因子,也就是定时器时钟频率 CK_INT 与数字滤波器所使用的 采样时钟之间的分频比,基本定时器没有此功能。
5)RepetitionCounter:设置重复计数器寄存器的值,用在高级定时器中。
6)AutoReloadPreload:自动重载预装载使能,即控制寄存器 1 (TIMx_CR1)的 ARPE 位。
该寄存器需要设置的就是标红的部分;其余不需要进行修改。

HAL_TIM_Base_Start_IT 函数
是更新定时器中断和使能定时器的函数。
其声明如下: HAL_StatusTypeDef HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim);
该函数调用了__HAL_TIM_ENABLE_IT 和__HAL_TIM_ENABLE 两个函数宏定义,分别是更新定时器中断和使能定时器的宏定义。
五、基本定时器实验
5.1实验描述
LED0的进行状态翻转,将在定时器更新中断里进行500ms 周期的定时器更新状态。
5.2源码
main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/TIM/tim.h"
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
led_init(); /* LED初始化 */
tim_init(5000-1,7200-1); /* 定时器初始化并传参 */
while(1)
{
}
}
tim.c
#include "./BSP/TIM/tim.h"
#include "./BSP/LED/led.h"
TIM_HandleTypeDef tim_handler;
//定时器中断初始化函数
void tim_init(uint32_t arr,uint32_t psc)//arr自动重装载计数器值,psc预分频系数
{
__HAL_RCC_TIM6_CLK_ENABLE();//使能时钟
tim_handler.Instance=TIM6;//设置外设基地址
tim_handler.Init.Period=arr;//设置自动重装载计数器值
tim_handler.Init.Prescaler=psc; //设置预分频系数
tim_handler.Init.CounterMode=TIM_COUNTERMODE_UP;//计数模式
HAL_TIM_Base_Init(&tim_handler);//初始化库函数
HAL_TIM_Base_Start_IT(&tim_handler);//更新定时器中断和使能定时器的函数
}
//定时器基础Msp初始化
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
HAL_NVIC_EnableIRQ(TIM6_IRQn);//中断使能
HAL_NVIC_SetPriority(TIM6_IRQn, 2, 2); //设置中断优先级
}
//定时器6中断服务函数
void TIM6_IRQHandler(void)
{
HAL_TIM_IRQHandler(&tim_handler);
}
//定时器溢出中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_5);//LED0状态翻转
}
led.c
#include "./BSP/LED/led.h"
void led_init(void)
{
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitTypeDef led0_init;
led0_init.Mode=GPIO_MODE_OUTPUT_PP;
led0_init.Pin=GPIO_PIN_5;
led0_init.Pull=GPIO_PULLUP;
led0_init.Speed=GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &led0_init);
__HAL_RCC_GPIOE_CLK_ENABLE();
GPIO_InitTypeDef led1_init;
led1_init.Mode=GPIO_MODE_OUTPUT_PP;
led1_init.Pin=GPIO_PIN_5;
led1_init.Pull=GPIO_PULLUP;
led1_init.Speed=GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOE, &led1_init);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOE,GPIO_PIN_5, GPIO_PIN_SET);
}
链接:https://pan.baidu.com/s/1z1SW6zDqTskoBmJs6rVEtA
提取码:1022
5.3实验现象
基本定时器视频
总结:本节我们学习了STM32定时器中的基本定时器,主要内容包括:定时器的概述、基本定时器的内容、相关寄存器的讲解,实验的配置步骤与相关库函数,最后利用实验证明了的基本定时器的使用。内容不难,还望各位读者多多阅读,最好能自己实践一下。
创作不易,还请大家多多点赞支持!!!