无人机航向重叠率和旁向重叠率的计算
介绍
无人机在规划一块区域的时候,我们需要手动的给予一些参数来影响无人机飞行,对于一块地表,无人机每隔N秒在空中间隔的拍照地表的一块区域,在整个任务执行结束后,拍到的所有区域照片能够完整的表达出一块地表,那这次任务就是成功的。 当然,如果想完整的把一块地表拍下来也很简单,我们完全可以不停的去拍照,飞行的间隔特别小,但这不是我们想要的,因为这种方式比较浪费资源,我们想要的是在可能的情况下,以最少的航线规划、最少的图片数量来诠释这块地表,毕竟wayPoint最多只能执行99个。
重叠率
重叠率又分航向重叠率和旁向重叠率:
- 航向重叠率:指无人机在一条航线前进拍照时,第一次拍照的图片与第二次重叠的概率
- 旁向重叠率:指无人机在第一条航线拍的照片与第二条航线拍的照片重叠的概率
航向重叠率
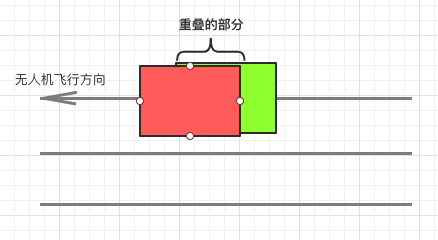
用一张图来表示,绿色图块是第一次拍照拍到的地表区域,红色图块是第二次拍照拍到的地表区域,他俩重叠的部分的区域相对于他们自己来说就叫做航向重叠率。假设我们现在设置这次无人机飞行的航向重叠率为50%,那么重叠的部分正好是他们自身的一半,那么能不能设置重叠率为100%呢?当然不行,这样话,绿色块和红色块就是一个完美的重合,也就意味着第一次拍照和第二次拍照都在同一个地方,无人机就根本不会往前飞行了,而是停留在那。
旁向重叠率

绿色块是我们在第一条航线中拍到的区域,红色块是我们第二条航线拍到的区域,他俩重叠的部分相对于他们自己来说就叫做旁向重叠率,旁向重叠率是影响航线规划间隔的唯一因素,我们需要通过重叠率来计算出飞行路径的间隔,当然,此处的重叠率也不能设置为100%,如果设置100%的话,那么红色块就会和绿色块重叠,也意味着第一条航线和第二条航线重叠,无人机也就只会在一条航线上来来回回的飞行。
焦距与画幅
如果想知道一张图片所拍到的区域真实面积的话,那么焦距与画幅是离开不的因素。

如图所示,当前无人机是正向向我们飞过来的,我们需要求 拍摄到的真实的距离 ,其实看到图我们就能猜到,这是一个相似三角形的运算,计算公式:
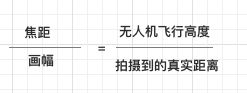
那么,也就意味着我们需要知道焦距、画幅、无人机高度这些已知值,才能计算出拍摄到的真实距离。
焦距
焦距的获取Dji已经给出了API,我们可以直接获取。
public static Aircraft getAircraft() {
BaseProduct product = getProduct();
if (product != null && product.isConnected()) {
if (product instanceof Aircraft) {
return (Aircraft) product;
}
}
return null;
}
Camera camera=getAircraft().getCamera();
//如果camera不为空,并且当前drone支持焦距变焦
if (camera != null&&camera.isOpticalZoomSupported()) {
camera.getOpticalZoomFocalLength(new CommonCallbacks.CompletionCallbackWith() {
@Override
public void onSuccess(Integer integer) {
//获取到焦距值
}
@Override
public void onFailure(DJIError djiError) {
}
});
}else{
//如果不支持焦距的话,则可以给个默认的焦距值 24(单位为毫米)
} 画幅
画幅是一个固定值,分为长画幅与短画幅,上图中仅仅只是一个平面图,无法表示长画幅与短画幅的意思,我们对上图再做个立体图也就知晓了

画幅其实是一个矩形,也正好对应我们拍摄到的照片是一张矩形的照片,画幅的默认值为。
- 长画幅:35mm(单位毫米),与旁向重叠率相关
- 短画幅:24mm(单位毫米),与航向重叠率相关
计算
由于每次在规划航线时,无人机高度是用户自由进行选择拖动的,所以也是一个已知值,每次拖动无人机高度,航线会重新进行规划
非重叠距离公式
下面是一个通用的计算公式,计算出非重叠部分的真实距离
/**
* @param height 无人机高度,单位米(m)
* @param frame 画幅
* @param focal 焦距
* @param ratio 重叠率
*/
public static double get(double height, double frame, double focal, double ratio) {
//todo 如果focal焦距为0的话,则使用默认值值24毫米
focal = focal == 0 ? 24 : focal;
//单位换成米
focal = focal / 1000;
frame = frame / 1000;
//设呈现的真实距离为x
double x;
//拍摄到的距离
x = frame * height / focal;
//设重叠距离
double d;
//重叠部分的距离
d = ratio * x;
//非重叠部分的距离 (单位米)
d = x - d;
return d;
}航向重叠计算
已知短画幅=24mm,假设从无人机拿到的焦距是26mm,高度设置的是100米,重叠率设置80%,则无人机真正拍摄到的距离差为:
double distance=get(100,24,26,0.8) 现在计算出了无人机在拍摄照片的时候,拍摄第一张的位置与拍摄第二张的位置的距离差,那么计算这个距离值拿来干什么用呢,我们知道,距离=速度*时间 ,我们拍照的时间间隔是固定的,假设我们设计的时间是每隔2s进行一次拍照,那么,我们就可以根据 这个公式计算出 速度 ,然后将这个速度设置给 wayPoint , 当然,这个速度不能超过无人机的最大速度(10m/s),我们可以在此做个判断,如果超过无人机最大速度,则设置无人机最大速度为 wayPoint 的速度,如果没有,则反之。我们可能在想,假设公式计算出来的最大速度是20m/s,如果我给他设置了最大速度10m/s的话,不会有影响吗?其实不然,我们假设飞行的距离是40m,我以20m/s的速度进行飞行,那么也就是2s就飞完了,如果这时候我下调到10m/s进行飞行,也就是需要4s才能飞完,已知无人机每隔2s进行一次拍照,那么20m/s的速度只需要拍一张就足够了,10m/s的就需要拍摄两张,这并不会影响拍摄的区域,只不过拍摄的照片比预期多了而已。
旁向重叠计算
旁向重叠的计算影响航线的的间隔,对于一块固定地表,间隔越宽,则飞行的航线就越少,间隔越窄,则飞行的航线就越多,主要影响间隔的就是重叠率。
已知长画幅=35mm,假设从无人机拿到的焦距是26mm,高度设置的是100米,重叠率设置80%,则航线间距离为:
double distance=get(100,35,26,0.8) 最终将航线距离丢给航线路径规划公式,计算出任务所执行的