PSoc62™开发板之串口通信
实验目的
1.使用串口和PC机通信:接收和发送信息
2.接收GNSS模块定位信息
实验准备
- PSoc62™开发板
- CH340 USB转TTL模块
- ATGM332D GNSS模块
- 公母头杜邦线x4
板载资源
板载有多少uart
创建工程例程,在libraries/HAL_Drivers/uart_config.h中查看BSP支持的uart数量及对应的GPIO,可以看到一共有7组uart
/*
* Copyright (c) 2006-2023, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-07-08 Rbb666 first version
*/
#ifndef __UART_CONFIG_H__
#define __UART_CONFIG_H__
#include uart0-uart6和GPIO对应关系表
uart2是比较特殊的,两组不同的GPIO都可以使用它
| 分组 | RXD | TXD |
|---|---|---|
| uart0 | P0.2 | P0.3 |
| uart1 | P10.0 | P10.1 |
| uart2 | P3.0 / P9.0 | P3.1 / P9.1 |
| uart3 | P6.0 | P6.1 |
| uart4 | P7.0 | P7.1 |
| uart5 | P5.0 | P5.1 |
| uart6 | P6.4 | P6.5 |
电路图
串口IO
这里以uart0为例,P0.2对应MCU_ARD_PWM11,P0.3对应MCU_ARD_PWM12

模块连接图
右侧排母从上往下第6、7引脚分别对应uart0 TXD、RXD

状态指示灯
板子有两个自主控制的绿色LED,通过上拉方式接入GPIO,MCU_USER_LED1对应P0.0,本次实验使用它来指示uart0的数据接收状态
使能串口
在创建的RT-Thread串口工程中打开RT-Thread Settings,点击右边的箭头<<进入详细页,使用前先使能uart0,如下图所示

程序设计
和PC机通信
通过CH340 USB转TTL模块连接PC和uart0,实物连接图如下

编码实现
#include 打开串口调试工具,打开对应的COM口,串口设置和上面的代码保持一致:波特率115200、数据位8位、停止位为1位、奇偶校验位为无

在RT-Thread Studio初始化uart0,使用msh终端输入uart0_setup命令
初始化成功,可以在串口调试工具看到以下信息
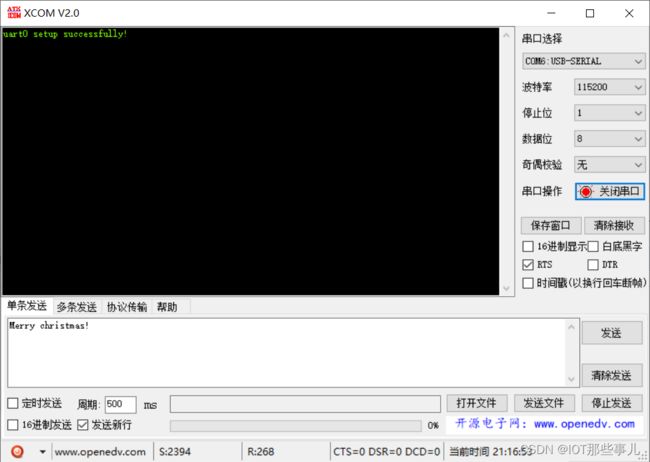
自定义串口消息,点击发送按钮,可以看到发出去的消息被开发板转发了回来,而LED也随即闪了一下

接收GPS模块定位数据
通过uart0连接ATGM332D GNSS模块,实物连接图如下

编码实现uart0串口通信,注意GNSS模块的波特率默认为9600,其它跟上面的example保持一致
#include 在msh终端输入uart0_setup后GNSS数据读取结果如下
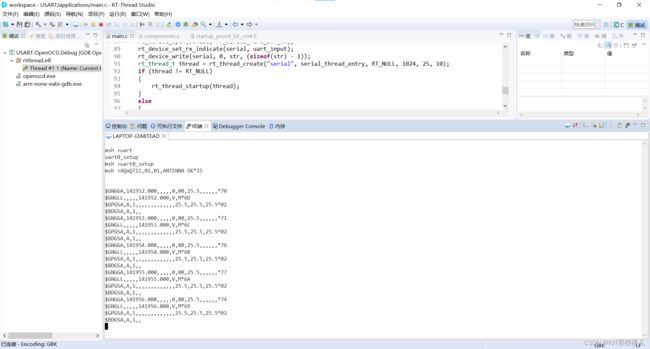
运行效果如下,可以看到GNSS报文以1Hz的频率打印,LED灯在不停地闪烁
PSoc62™开发板之串口通信