步进电机驱动详解
1. 前言
步进电机相比普通直流电机来说模型结构方面更加复杂,比如步进电机没有设计直流电机用于切换电流方向的换向器,这一设计致使步进电机转子无法同直流电机那样接入直流电源立马开始运动,这需要我们轮流控制步进电机的多个线圈使磁场旋转起来从而驱动电机转子运动。所以控制步进电机线圈磁场就是所谓的步进电机驱动。
2. 相数和磁对数
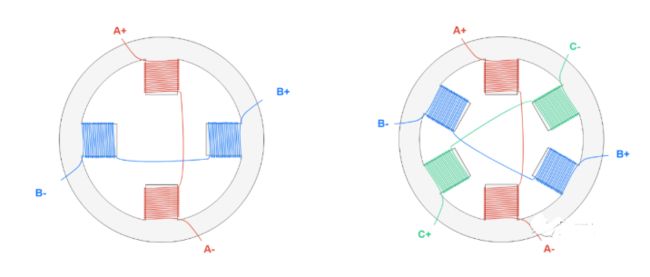
步进电机相数指的是步进电机中独立线圈的数目,而磁对数表示每一相会产生多少对磁场。如下图中,左边是双相步进电机,右边是三相步进电机示意图。
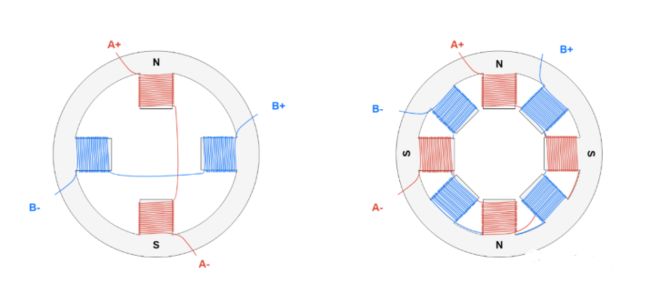
如下图中,左图是 2 相单磁对数定子,右图是 2 相偶磁对数定子,字母 N 和 S 表示当 A+ 和 A- 通电时,定子产生的磁场的磁极(N 和 S 指的是磁极,通过磁极可以知道磁场的方向)。
步进电机共有二相,三相和五相等系列。目前最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
3. 驱动模式
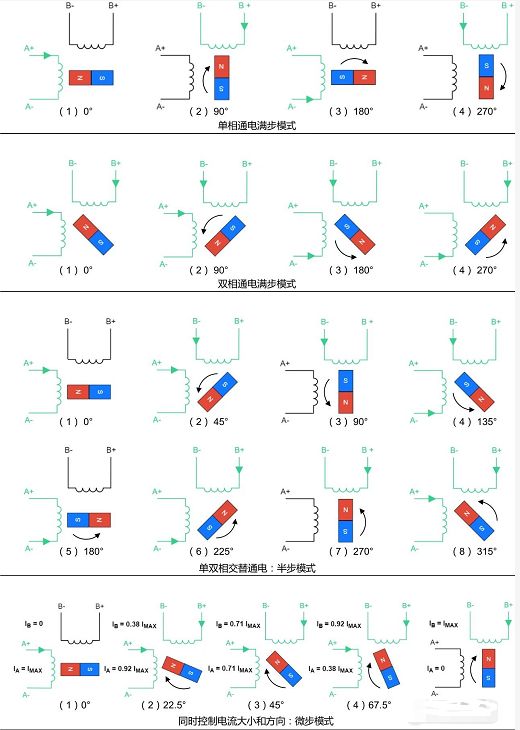
步进电机有三种驱动模式,即满步,半步,还有微步驱动。下面来详细说明这三种驱动模式。
3.1 满步驱动
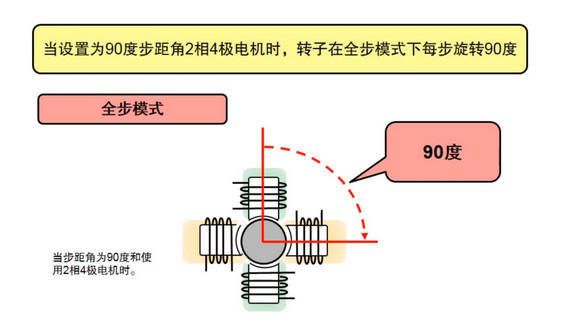
满步驱动,就是一次走一个步距,这是一种常用的驱动方式。这里的步距是步进电机物理结构上的步距,比如是两个独立相位线圈的距离。如下图两个线圈之间的物理结构夹角是 90 度,那么满步走一个步距就是运动 90 度。
根据步进电机通电相数,满步驱动又分成两种,一种是单相通电驱动,一种是双相通电驱动。单相通电驱动指的是每次只给其中一相线圈接通电流,双相通电驱动指的是每次同时给两个相的线圈接通电流。满步驱动有如下两张示意图。
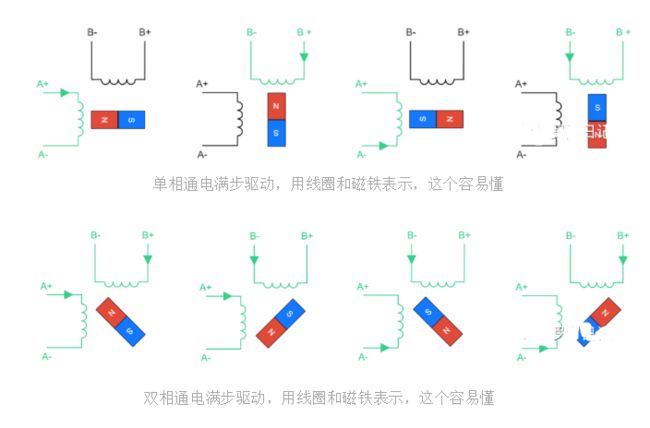
示意图的上半部分为单相通电驱动,下半部分为双相通电驱动
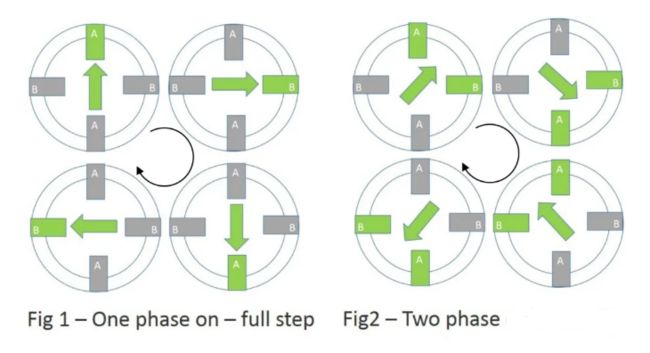
示意图的左边为单相通电驱动,右边为双相通电驱动
3.2 半步驱动
半步驱动,就是一次只走半个步距。实现方式是将满步驱动中单相通电驱动和双相通电驱动交替使用,原理如下图。
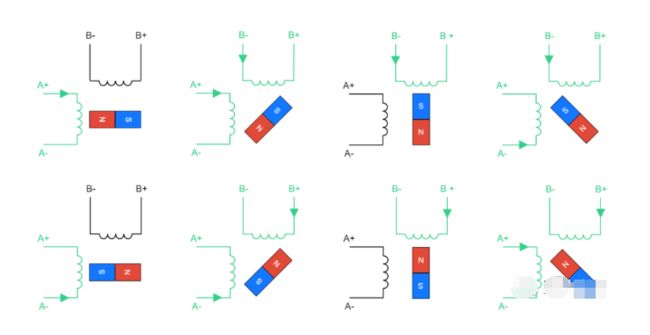
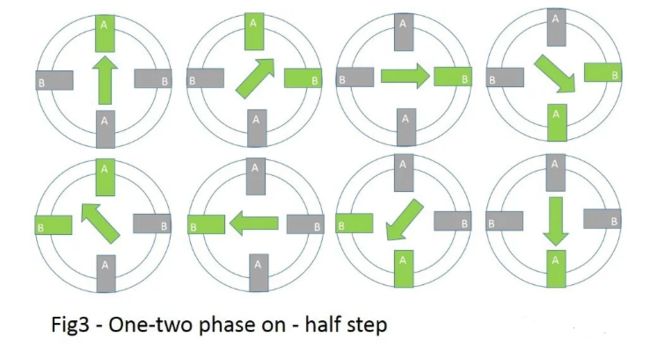
第一次使用单相通电驱动一次只给其中一个线圈通电,第二次使用双相通电驱动一次给其中两个线圈通电,第三次使用单相通电驱动一次只给其中一个线圈通电,第四次使用双相通电驱动一次给其中两个线圈通电,以此类推。
单相和双相交替通电,实现半步驱动的概念。单相通电时,线圈产生磁场,磁铁因为磁场的吸引力,指向通电的线圈。双相通电时,因为两个线圈都产生磁场,所以合成磁场让转子处于中间平衡位置。
半步驱动的好处是提高分辨率(旋转角度的分辨率,可以让每一步之间的角度变得更小),但是缺点是扭矩只有满步驱动的 70%,当然,也可以通过优化线圈中电流大小,来提高半步驱动扭矩。
3.3 微步驱动
基于双相通电满步驱动,给两相的线圈同时通电,因为电流大小不同,将会导致线圈产生的磁场强度不同,从而导致转子的平衡位置发生变化,这就是微步驱动的原理。
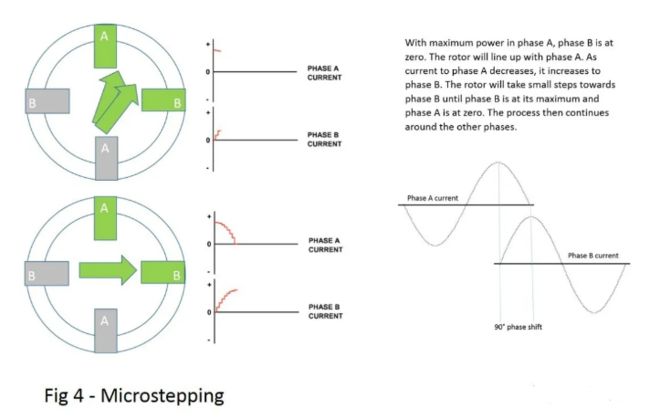
微步驱动原理的具体流程是 A 线圈最开始有最大电流,而 B 线圈此时电流为零,定子指向 A 线圈。A 线圈慢慢减小电流, B 线圈慢慢增加电流,因为磁场平衡位置的变化,定子慢步向 B 线圈转动。宏观来看,A 线圈中电流变化接近 Cos 曲线,B 线圈电流变化接近 Sin 曲线,直到 A 线圈电流减为零,而 B 线圈电流达到最大值,定子指向 B 线圈。
A 相和 B 相微步驱动电流示意图:电流每一步的变化的大小,决定了微步运动的大小,下图是 1/4,1/8,1/16 微步电流变化示意图。
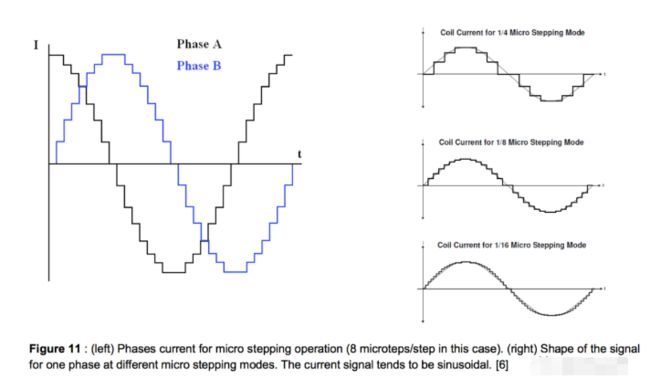
微步驱动电流示意图:
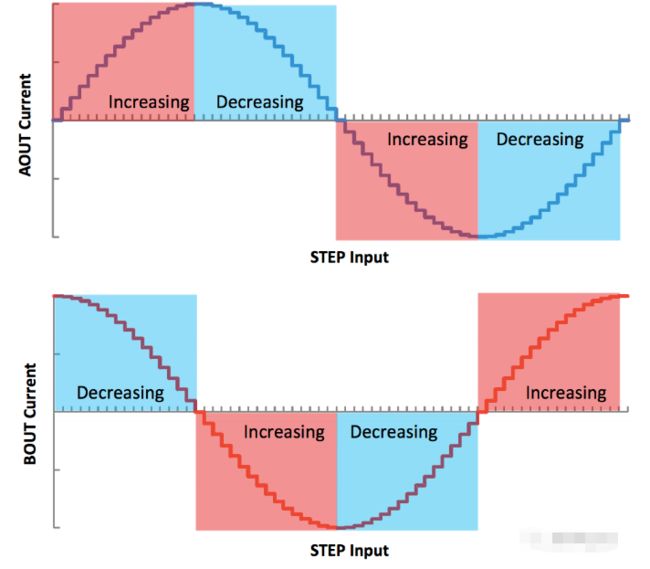
微步运动举例:在图 1 中,A 线圈通满电流,图 2 中 A 线圈通最大电流的 0.92 倍,而 B 线圈通最大电流的0.38 倍,实现 22.5° 旋转。同理,图 3 中,A 和 B 线圈同时通最大电流的 0.71 倍,可以实现 45° 旋转。

比如,一个 200步 的步进电机,如果用满电流驱动,那么它的步距是 1.8°,而如果用一半的电流驱动,那么它的步距将会是 0.9° 当然还可以继续细分,一般地,步进电机一个步距可以细分 256 步。步数越多,可以获得越平滑的运动,噪声也越小,不容易失步(丢步),但是代价就是扭矩大大减小。所谓失步,就是电机没有按照命令走相应的步数。
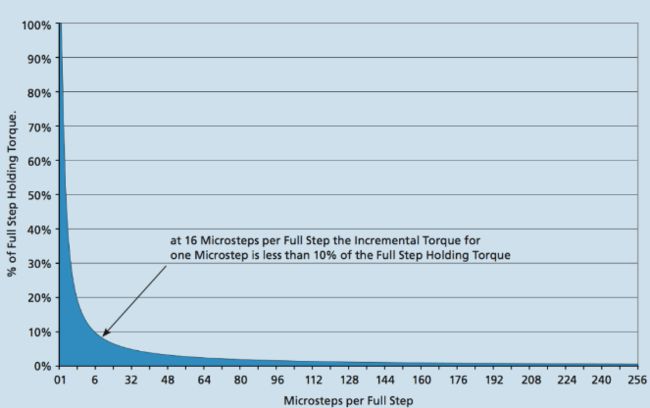
微步驱动保持扭矩和步数的关系
如下图微步驱动保持扭矩和步数的关系比如,当把一步分成 16 步时,扭矩仅为保持扭矩的 10% 左右。
设计时需要留够余量,比如一般会考虑负载的加减速,运动线的拖拽力,还有步进电机本身的制动扭矩(Detent Torque,由于定子和转子之间的磁力,产生的扭矩,一般是保持扭矩的 5%-20%),摩擦扭矩等。
当微步扭矩超过负载扭矩和摩擦扭矩及制动扭矩之和时,连续的微步才会实现。
有时制动扭矩起正作用,比如当电动机停止时,制动转矩可能是有益的,因为它会抵消运动中的转子的动量,因此更高的制动转矩,将有助于电动机更快地停止。
也就是说,在微步模式下,电机不一定会动,这就会打乱全局精度。所以,虽然微步可以实现更高的分辨率,但是并不一定能带来更好的精度。
你可能要问了,既然不一定能提高精度,那么为什么还要有微步驱动模式呢?
其实,微步驱动的主要作用在于减小机械噪声,减小共振,减小机械传动结构的磨损,实现更平滑的运动。
有研究表明,只有当载荷非常轻,微细步的扭矩足以驱动负载时,才可以提高精度。
4. 总结
最后将前面说到的满步,半步,微步驱动整合成一张示意图