系统建模与仿真基础-欧拉法、龙格库塔法Matlab
系统建模与仿真基础-欧拉法、龙格库塔法 附Matlab代码
(本人也在不断学习中,若有错误,欢迎大家批评指正!)
1.系统试验研究方法
1.1解析法
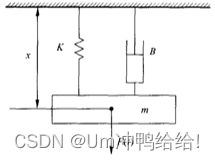
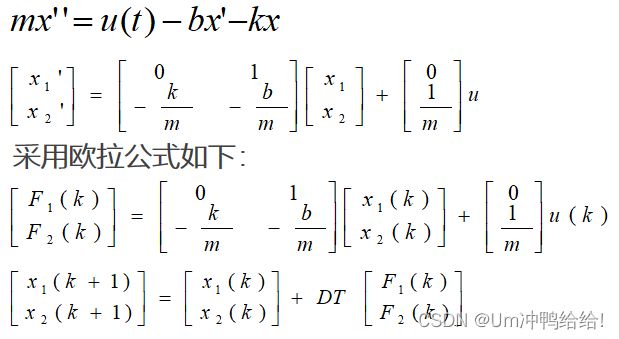
纯理论,比如将实际模型等效成如图所示模型,进而得到描述该系统动态过程的二级常微分方程。
![]()
1.2实验法
在实际系统上利用仪器仪表与装置,给系统施加一个信号,通过测量系统响应来确定系统性能。
1.3仿真实验法
在模型上进行系统性能分析与研究,模型分为物理模型和数学模型。我们重点讨论数学模型的数字仿真问题。
2.建模三要素
- 目的要明确
- 方法要恰当
- 结果要验证
2.1 建模方法
a.机理建模(白盒法):对内部结构或特性清楚的系统,依据基本的物理定律建立数学模型。
b.实验建模(黑盒法):对内部结构或特性不清楚的系统,根据人工经验或试验得到数据,再经分析、归纳等推理建立系统模型
c.综合建模:在实际工作中通常采用多种方法混合应用。
b.实验建模(黑盒法):
1.频率特性法(自动控制系统中所学到的知识,后面有时间的话,或许会专门写一篇文章讲解一下)
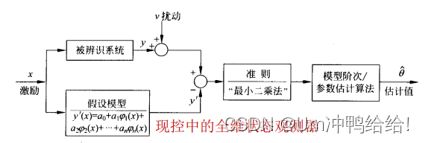
2.系统辨识法:三要素–数据、假设模型、准则(现代控制系统中所学到的知识,后面有时间的话,或许会专门写一篇文章讲解一下)
仿真中最常用的数值积分法
- 欧拉法
- 隐式欧拉法
- 龙格-库塔法

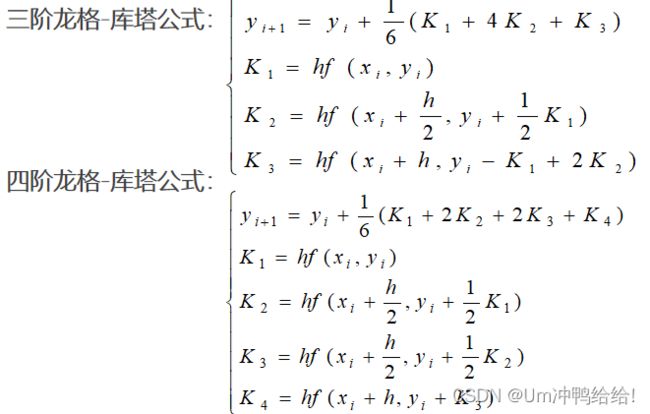
写代码时,根据上述公式来写即可。(其他博客可能与之有些出入,但本质相同)
显示(向前)欧拉法
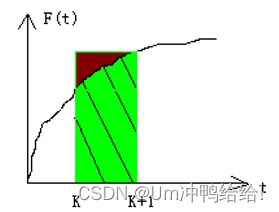
几何解释:欧拉公式用矩形面积近似代替积分面积。步距DT越小,精度越高。

隐式(向后)欧拉法
几何解释:与显示欧拉公式同理,还是用矩形面积近似代替积分面积只不过近似代替的方式有变化,如下图所示。
龙格-库塔法

(这里借用网上图片,具体来源记不清了,若有侵权,联系我,我会删除)
龙格-库塔法要求所求的解具有较好的光滑性。
代码(例题)
例1:对于前述弹性阻尼系统模型:
MATLAB程序如下:
clear;
X1= 0; X2= 0;
M= 1; K= 1; B=1;u =1.0; ST=20; DT=0.1;
NP = ST / DT;
for i=1:NP
F1=X2; F2=-K/M*X1-B/M*X2+u/M;
Y(i)=X1;
X1 = X1 + DT * F1; X2 = X2 + DT * F2;
end
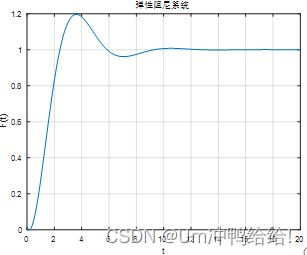
plot((1:NP)*DT,Y);
xlabel('t');ylabel('F(t)');grid;
title('弹性阻尼系统');
采用欧拉公式求解:
clear; %清空内存变量
A=[0 1;-1 -1]; B=[0;1];C=[1 0];%A B C X Y初值
X =[0;0]; u=1; % X 初值,u的大小
ST=20; DT=0.01; NP=ST/DT; %仿真时间步距点数
for i=1:NP;
F=A*X+B*u; X=X+DT*F; Y(i)=C*X;
end
plot((1:NP)*DT,Y);
xlabel('t');ylabel('F(t)');grid;
title('弹性阻尼系统');
两种方法运行结果如下图所示:

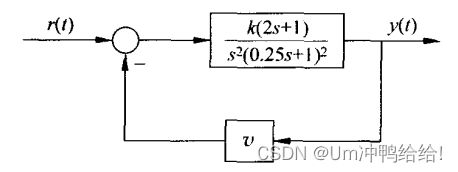
例2.求下图所示系统的阶跃响应y(t)的数值解。
典型闭环系统的仿真程序框图
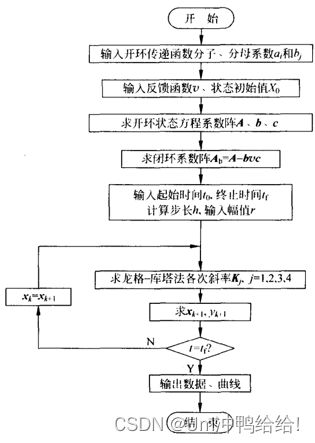
龙格库塔法:面向典型闭环系统数字仿真的程序,从第二部分到程序末尾可编辑为sp3_1.m文件存储起来。使用时,只要进入到MATLAB语言环境,按第一部分格式输入系统参数和运行参数,在调用该文件,即可得到运算结果。
程序框图对应的代码:
%%%1.输入数据
% a=[a0,a1,...,an]
% b=[b0,b1,...,bm]
% v=V0;
% n=n0;
% T0=t0;
% Tf=tf;
% h=h0;
% R=r;
%%%2.形成开、闭环系数阵
b=b/a(1);a = a/a(1); A = a(2:n+1);
A=[rot90(rot90(eye(n-1,n)));-fliplr(A)];
B=[zeros(1,n-1),1]';
m1=length(b);
C=[fliplr(b),zeros(1,n-m1)];
Ab=A-B*C*v;
X=X0';y=0;t=T0;
%3.运算求解
N=round(Tf-T0)/h;
for i = 1:N
K1=Ab*X+B*R
K2=Ab*(X+h*K1/2)+B*R;
K3=Ab*(X+h*K2/2)+B*R;
K4=Ab*(X+h*K3)+B*R;
X=X+h*(K1+2*K2+2*K3+K4)/6;
y=[y,C*X];
t=[t,t(i)+h];
end
%4.输出结果
[t',y']
plot(t,y)
调用sp3_1.m文件,求取y(t)的数值解。
k=1;
a=conv([1 0 0],conv([0.25 1],[0.25 1]));
b=[2*k k];
X0=[0 0 0 0]
v=1;n=4;T0=0;Tf=10;h=0.25;R=1;
sp3_1
[t',y']
最终结果如图所示:
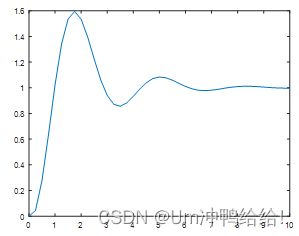
纵轴为y(t),横轴为时间t。
也可以对开环放大系数k重新赋值,其余参数不变,分析k对反馈系数v的影响作用,再次调用sp3_1.m文件,运行即可。