AUTOSAR CP (文章 2)
Autosar概述
AUTOSAR:Automotive Open System Architecture(汽车开放系统架构)。
是由全球各大汽车整车厂(OEM)、汽车零部件供应商、汽车电子软件系统公司联合建立的一套标准协议,是对汽车技术开发一百多年来的经验总结。拟定了一个符合汽车电子软件开发的、开放的以及标准化的软件架构。该架构旨在改善汽车电子系统软件的更新与交换,同时更方便有效地管理日趋复杂的汽车电子软件系统。
■ 时间
1. 在2003年AUTOSAR组织刚成立的时候,只有一个AUTOSAR标准,没有AP(Adaptive Platform)与CP(Classic Platform)之分。
2. 在2005年,AUTOSAR组织推出了第一个AUTOSAR版本1.0。
3. 在2017年,AUTOSAR组织推出了第一个AP AUTOSAR版本R1703,这是第一次外界看到AP AUTOSAR,AUTOSAR也是从这个时候起被分为AP与CP。此时,CP AUTOSAR版本命名为R4.x.x。
4. 2019年11月份,将AP、CP以及FO(Foundation)版本号进行了统一命名:AP AUTOSAR R1911、CP AUTOSAR R1911等。
发布内容
AP AUTOSAR方面,AUTOSAR组织除了发布相关的标准外,还为AUTOSAR会员提供了APD(Adaptive Platform Demonstration),APD中包含仅供参考的AP AUTOSAR工具、代码包等。
目标
无论是AP AUTOSAR还是CP AUTOSAR,总体目标是一致的:
▪ 更好的管理数量增多,功能复杂度增加的汽车ECU
▪ 改善ECU软件质量和可靠性
▪ 提升产品升级灵活性,缩短产品推向市场的时间
▪ 可拓展的架构解决方案
倡议内容
CP AUTOSAR与AP AUTOSAR倡议内容是相同的:
▪ 汽车软件架构标准设计
▪ 详细的底层软件模块设计
▪ 汽车产品各域标准化数据描述
▪ 适用于此架构的过程定义和软件工具链
AUTOSAR中存在5种伙伴关系:
1. 核心合作伙伴(9个):宝马,博士,欧陆,戴姆勒,福特,通用,PSA集团,丰田,大众。
2. 高级合作伙伴:华为,百度,EB,长城,本田,英特尔,英飞凌,英伟达等。
3. 开发合作伙伴:劳德巴赫,Softing等
4. 副合作伙伴:中国一汽,上汽,吉利汽车,江淮汽车,恒润。
5. 参加者:各大学。
AutoSar的思想是将ECU的整个系统分层处理,将系统功能和硬件依赖性剥离开,通过AutoSar联系起来。
AutoSar提供标准的应用程序(SWC)接口,运行环境(RTE),基础软件(BSW) ,总线通信和开发流程及数据交换格式。
AUTOSAR主要标准了三大方面:
1.软件接口
2.交换格式
3.方法论
整车软件系统可通过AUTOSAR架构对车载网络、系统内存及总线的诊断功能进行深度管理,它的出现有利于整车电子系统软件的更新与交换,并改善了系统的可靠性和稳定性。目前支持AUTOSAR标准的工具和软件供应商都已经推出了相应的产品,提供需求管理,系统描述,软件构件算法模型验证,软件构建算法建模,软件构件代码生成,RTE生成,ECU配置以及基础软件和操作系统等服务,帮助OEM实现无缝的系统软件架构开发流程。
AUTOSAR计划目标主要有三个:
1. 建立分层的体系架构。
2. 为应用程序的开发提供方法论。
3. 制定各种应用接口规范。
AUTOSAR提供了以下标准。
资料来源,官方网站:https://www.autosar.org/
| 标准 |
缩写 |
说明 |
| Adaptive Platform |
AP |
自适应平台: AUTOSAR的高性能计算ecu解决方案,用于为高度自动化和自动驾驶等用例构建安全相关的系统 |
| Classic Platform |
CP |
经典平台: AUTOSAR针对具有硬实时和安全约束的嵌入式系统的解决方案 |
| Foundation |
FO |
基础平台: 加强AUTOSAR平台之间的互操作性。Foundation包含AUTOSAR平台之间可以互相共享的通用需求和技术规范(例如协议)。 |
| ACCEPTANCE TESTS |
AT |
经典平台的验收测试: 总线级和应用程序级的系统测试 |
| APPLICATION INTERFACE |
AI |
应用界面: AutoSar应用程序标准化接口, |
名词解释:
| 名词 |
说明 |
| EXP |
即Explaination"解释",详细介绍论题 |
| MMOD |
即Meta Model"元模型",介绍 AUTOSAR元模型 |
| MOD |
即Model"建模",介绍建模的原理 |
| RS |
即Requirement Specification"需求规范", 详细介绍需求 |
| SRS |
即Softeware Requirement Specification"软件需求规范", 描述所有软件模块的规范 |
| SWS |
即Softeware Specification"软件规范", 介绍软件模块设计和实现的规范 |
| TPS |
即Template Specification"模板规范", 详细介绍元模型 |
| TR |
即Technical Specification"技术规范",详细介绍技术规范 |
| OEM |
整车厂,奔驰、宝马等(做整车的装配工作) |
| TIER1 |
一级供应商,大陆、博世等(给OEM供应ECU等) |
| TIER2 |
二级供应商,英飞凌、NXP等(为TIER1供应零件,比如ECU上的芯片、电路板等) |
| VFB |
虚拟功能总线 |
| RTA-VRTE |
车辆运行时环境 |
Autosar CP – 概要
在过去的30-40年中,在汽车环境中使用软件,无论是以功能的数量还是复杂性来衡量,已经从简单的发动机管理系统发展到在车辆平台中普及。
AUTOSAR Classic 平台是为了应对汽车软件日益复杂的需求而开发的。该平台的特点是支持硬实时性、高安全性、低资源拥有属性 ECUs,因此非常适合于传统的汽车用例。Classic 平台仍然是功能性汽车 ECUs 的明显选择,这些 ECUs 直接连接到传感器和执行器,依赖于低资源使用率和经典的实时性能。
经典平台AutoSar CP分为4层,包括:
1.应用层(Application Layer),封装了部分或者全部汽车电子功能。
2.实时运行环境层(RTE),中间件部分给应用层提供了通信手段,APP各模块通信/ APP和BSW通信。
3.基础软件层(Basic Software),为各ECU服务而抽象出来的基础服务。
4.微控制器层(底层驱动),基础服务是可以抽象出来的。
![]()
正在上传…重新上传取消
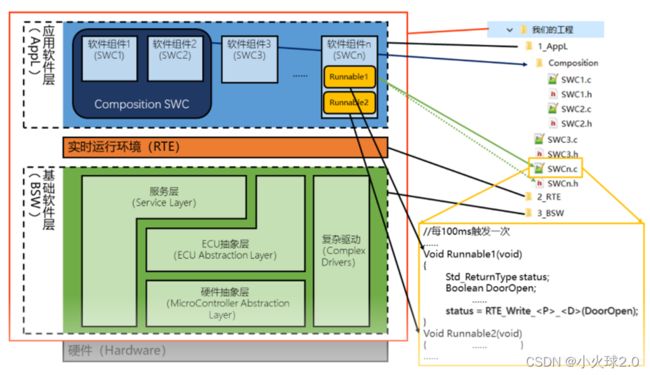
AutoSar CP 4层详细划分如下:
![]()
正在上传…重新上传取消
应用层中的功能由各软件组件SWC(software component)实现,组件中封装了部分或者全部汽车电子功能,包括对其具体功能的实现以及对应描述,如控制大灯,空调等部件的运作,但与汽车硬件系统没有连接。
应用层功能包括:软件组件SWC和端口PORT两部分。
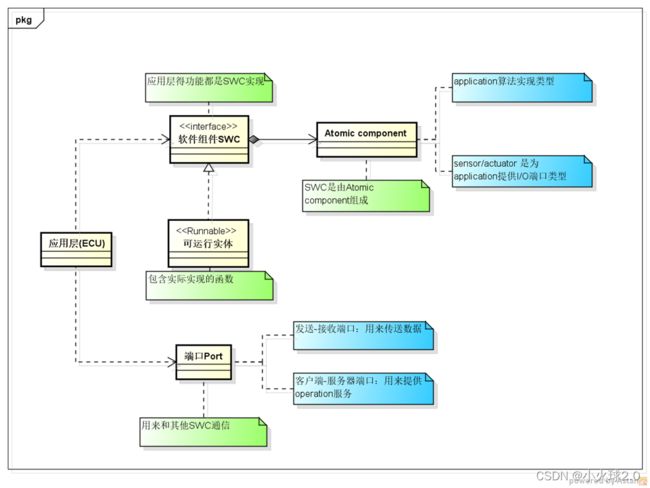
■ 软件组件SWC分类:
1. 原子,Atomic component(最小逻辑单元)。SWC由Atomic component组成。
▪ Application:算法实现类型,能在各ECU上自由映射;
▪ Sensor/actuator:
①为Application提供I/O端口类型 。
②用于与ECU绑定,但不可像Application那样能在各ECU上自由映射。
2. 集合,Composition,数个SWC的逻辑集合。
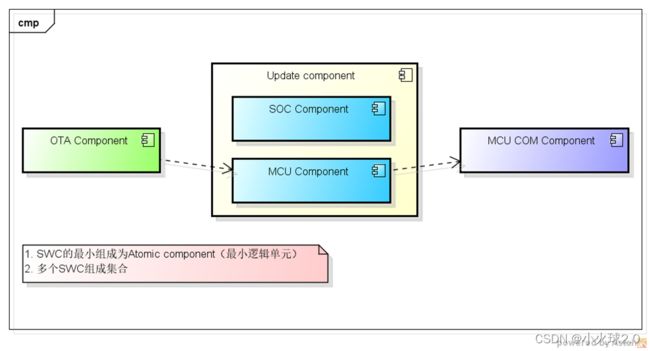
SWC组成一
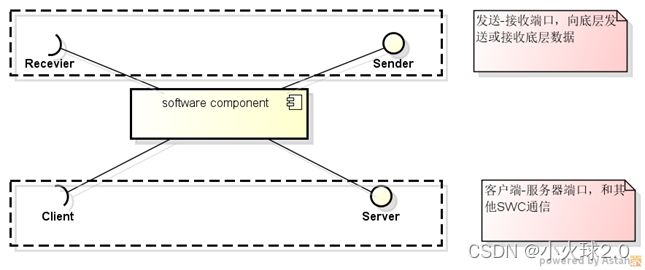
■ 端口Ports:
1. 端口Ports是用来和其他SWC通信
2. 通信内容:Data elements(S/R)与operations(C/S)。
▪ Data elements用Sender/Receiver通信方式
▪ operations用Client/Server通信方式
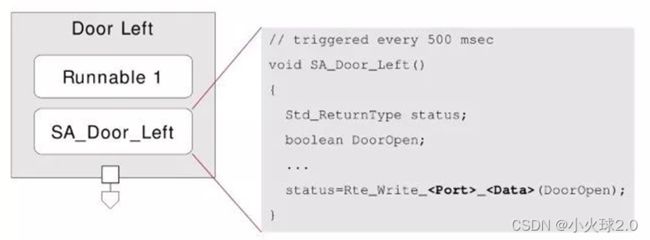
3. 发送-接收端口,向底层发送或接收底层数据。
▪ 传送数据,一个port可以包含多种Data elements
▪ 如果一个Data elements要通过总线传输必须和一个signal对应起来
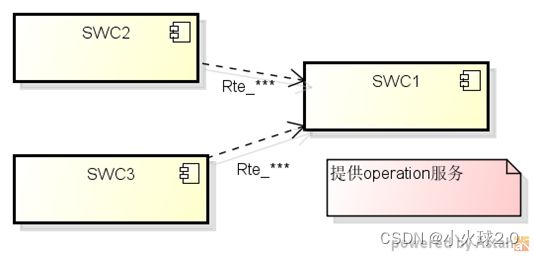
4. 客户端-服务器端口,和其他SWC通信。
▪ 提供operation服务
▪ 通过或异步
▪ 一个C/S端口可以包含多个operation
▪ Operations可以被单独调用

SWC组成二
■ 可运行实体(就是SWC中的函数),Runnable entities:
1. 包含实际实现的函数(具体的逻辑算法和操作)
2. Runables由RTE周期性,或事件触发调用。
2.3 Autosar CP – 实时运行环境层 RTE
应用软件层,封装了部分或全部汽车电子的功能和行为,但对外界仅仅开放了定义好的接口,称之为PortPrototypes,而所有ECU内部组件之间的通信及获取其他ECU资源的动作就都必须要通过接口来访问RTE来完成了。
中间件部分为应用层提供了通信接口,应用层通信关系如下:
1.软件组件能和同一个ECU上其他软件组件通信。
2.软件组件能和不同ECU上其他软件组件通信。
3.软件组件能和有端口并位于同一个ECU上的基础软件(BSW)进行通信。
●
而RTE就是这些交互使用的接口的集散地,它汇总了所有需要和软件体外部交互的接口。从某种意义上来看,设计符合AUTOSAR的系统其实就是设计RTE。

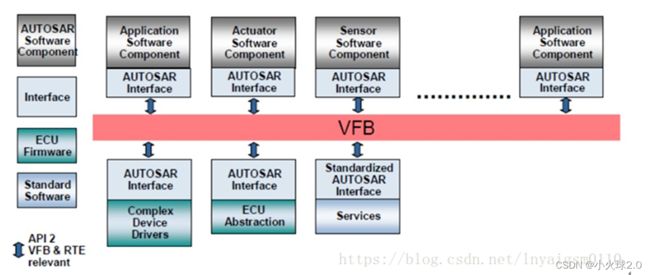
■ 虚拟功能总线VFB及运行环境RTE
1. VFB:虚拟功能总线,是底层基础软件与网络拓扑结构的抽象,是AUTOSAR提供的所有通信机制的集合,在信息数据交互的过程中,应用程序被建模为组合组件。当系统进行配置时,软件组件就会被映射到指定ECU上,而同时组件间的 虚拟连接 也被 映射到 了CAN, FlexRay,MOST等总线上。最后软件组件利用 预先定义好的端口 ,通过VFB来实现通信。
2. RTE:实时运行环境,即是具体单个ECU上对 VFB接口的实现 ,可以理解成是面向对象的编程语言中 对象的创建 。各软件组件之间不允许直接进行通信,由RTE封装好了下层如 OESK、COM等通信层BSW 后,为上层提供数据通信所需的RTE API ,再使用端口或者Sender-Receiver通信和Client-Server通信的方式进行交互。

SW-C之间的通信是调用RTE API函数而非直接实现的,都在RTE的管理和控制之下。每个API遵循统一的命名规则且只和软件组件自身的描述有关。具体通信实现取决于系统设计和配置,都由工具供应商提供的RTE Generator自动生成的。
在设计开发阶段中,软件组件通信层面引入了一个新的概念,虚拟功能总线VFB(Virtual Functional Bus)。它是对AUTOSAR所有通信机制的抽象,利用VFB,开发工程师将软件组件的通信细节抽象,只需要通过AUTOSAR所定义的接口进行描述,即能够实现软件组件与其他组件以及硬件之间的通信,甚至ECU内部或者是与其他ECU之间的数据传输。