MAX96706使用笔记
概览
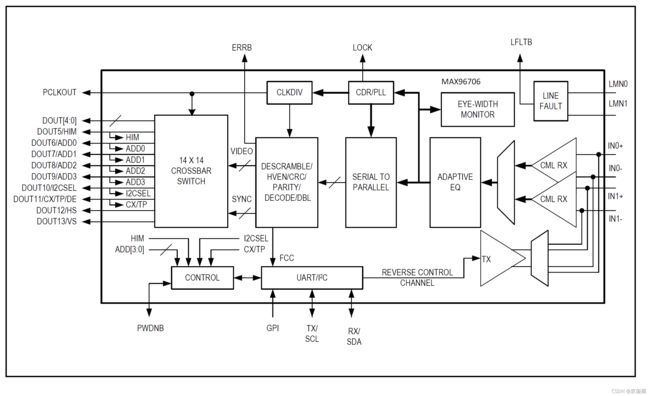
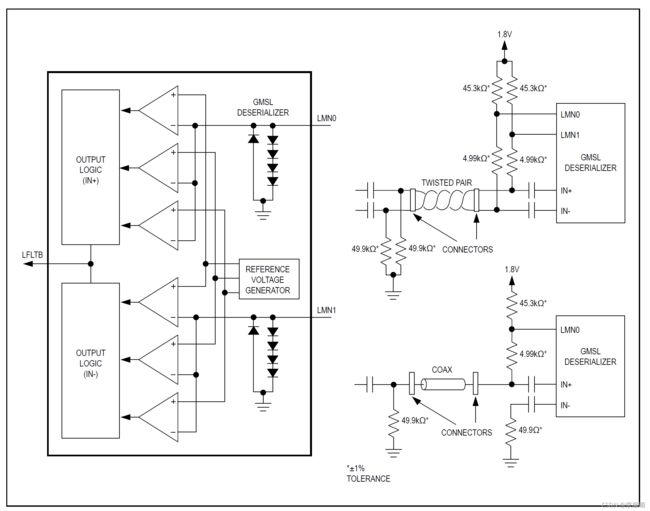
MAX96706是一个解串器,应用于汽车摄像头。特点包括自适应均衡和输出交叉点嵌入式开关。嵌入式控制通道在UART、IIC和混合UART/IIC模式以9.6~1Mbps的速度运行,允许对解串器,串行器和相机寄存器编程,与视频时序无关。
Detailed Description
Serial Link Signaling and Data Format
串行器对输入的并行数据进行加扰并将其与前向控制数据组合。 然后将数据编码为以数倍于输入字速率(取决于总线宽度)的单个比特流进行传输和输出。 解串器接收串行数据并恢复时钟信号。 然后将数据反序列化、解码和解扰为并行输出数据和前向控制数据.
Operating Modes
GMSL 设备可配置为以多种模式运行,具体取决于应用。 这些模式允许更有效地使用串行带宽。 大多数这些设置是在系统设计期间设置的,并使用外部配置引脚或通过寄存器位进行配置。
Video/Configuration Link
通常情况下,串行器在视频链接模式 (SEREN = 1) 下运行,视频数据和控制数据通过串行链接发送。在串行器中设置 SEREN = 0 以关闭串行化。 串行器在视频链接模式下上电,需要有效的 PCLK 才能运行。当 PCLK 不可用时,配置链接可用于设置串行器、解串器和外设。 在串行器中设置 SEREN = 0 和 CLINK = 1 以启用配置链接(SEREN = 1 强制串行器进入视频链接模式)。 建立 PCLK 后,打开视频链接 (SEREN = 1)。默认情况下,视频链接模式需要有效的 PCLK 才能运行。 在串行器中设置 AUTO_CLINK 位 = 1(如果支持)和 SEREN = 1,以在 PCLK 不存在时自动在视频链接和配置链接之间切换。
HS/VS Encoding
默认情况下,GMSL 为 HSYNC、VSYNC 和 DE(如果使用)分配一个视频位槽。 使用 HS/VS 编码,设备改为编码特殊数据包以同步信号以释放额外的视频位槽。 当设备处于高带宽模式时,HS/VS 编码默认开启。 (HIBW = 1)。 DE 仅在 HIBW = 1 且 DE_EN = 1 时进行编码。设置 HVEN = 1 以在 HIBW = 0 时打开 HS/VS 编码(DE,如果启用会占用一个视频位)。 HS/VS 编码要求 HSYNC、VSYNC 和 DE(如果使用)在活动视频期间保持高电平,而在消隐期间保持低电平。 使用反极性同步信号时使用 HS/VS 反转。
Control-Channel Interfaces
IIC Interface
串行链路通过控制通道将串行器和解串器 I2C 接口连接在一起。当 I2C 主设备向链路的一侧(本地侧)发送命令时,控制通道将此信息转发到链路的另一侧(远程侧),从而允许单个微控制器配置串行器、解串器和外设 . 微控制器可以位于串行器端(显示应用)和解串器端(相机应用)。 只要使用软件仲裁方法,就支持双 μC 操作。 串行链路假定在任何给定时间只有一个微控制器在通话。
Forward Control Channel
从串行器发送到解串器的控制数据在Forward控制通道上发送。数据被编码为前向高速链路中的串行位之一。 解串后,从串行链路中提取前向控制信道数据。 前向控制信道带宽超过最大外部控制数据速率,在前向控制信道上发送的所有数据在传输延迟几比特后出现在对端。
Reverse Control Channel
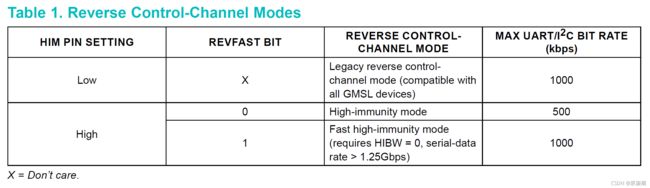
从解串器发送到串行器的控制数据在反向控制通道上发送。 数据被编码为一系列 1μs 脉冲,最大原始数据速率为 1Mbps。 高抗扰模式可用于在原始比特率降低 500kbps 的情况下提高反向控制信道的稳健性(Table 1).在高抗扰模式下,当串行比特率大于 1Gbps 时,在解串器中设置 HPFTUNE = 00。 设置 REV_FAST 位 = 1 将该速率增加回 1Mbps。 在 I2C 模式下,当输入数据速率(编码后)超过反向数据速率时,输入时钟通过时钟延展保持,以减慢外部时钟以匹配内部比特率。
IIC
设置I2CSEL=1以配置IIC-to-IIC模式的控制通道。在这种模式下,控制通道将IIC的命令从Soc转发到GMSL链路的另一端。远程设备充当连接到远程端设备的其他外围设备的IIC主设备。IIC-to-IIC模式使用时钟延长来保持Soc,直到数据和ACK(或NACK)已经通过链路发送。
I2C Bit Rate
本地 I2C 速率由微控制器设置。 远程 I2C 速率由远程设备设置。默认情况下,控制通道设置为 400kbps 到 I2C 的比特率。 编程 I2C_MSTBT 和 SLV_SH 位(寄存器 0x0D)以匹配所需的微控制器 I2C 速率。
Software Programming of the Device Addresses
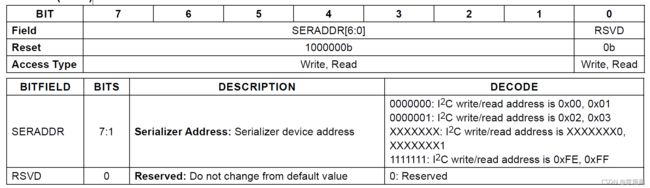
串行器和解串器具有可编程器件地址。这允许多个 GMSL 设备以及 I2C 外设共存于同一控制通道上。 串行器设备地址在每个设备的寄存器 0x00 中,而解串器设备地址在每个设备的寄存器 0x01 中。要更改设备地址,首先写入地址更改的设备(串行器设备地址更改的串行器寄存器 0x00,或解串器设备地址更改的解串器寄存器 0x01)。然后将相同的地址写入另一台设备上相应的寄存器(串行器设备地址更改的解串器寄存器0x00,或解串器设备地址更改的串行器寄存器0x01)。
I2C Address Translation
该设备支持最多两个设备地址的 I2C 地址转换。 使用地址转换为具有有限 I2C 地址的外设分配唯一的设备地址。 源地址(address to translate from)存储在寄存器 0x09 和 0x0B 中。 目标地址(address to translate to)存储在寄存器 0x0A 和 0x0C 中。
Configuration Blocking
设备可以阻止对其寄存器的更改。设置 CFGBLOCK 使所有寄存器只读。 一旦设置,寄存器将保持阻塞状态,直到电源被移除或 PWDNB 为低电平。
Remote-End Operation
当 I2C 主设备在本地从设备(直接连接到主设备的串行器/解串器)发起通信时,远端设备充当主设备,发送从本地设备转发的数据,并转发从本地设备收到的任何数据。 连接到远程端设备的外围设备。 该远程侧主设备根据 I2C 主设置寄存器中的时序设置进行操作。 设置主设置以匹配外部微控制器使用的时序设置。
Clock-Stretch Timing(时钟延长时序)
I2C 接口使用时钟延展来为通过串行链路转发数据留出时间。 主微控制器以及任何连接的外设必须接受 GMSL 设备的时钟延长。
Packet-Based I2C(基于数据包的 I2C)
基于分组的控制信道可用于增强控制信道的错误处理。 这种控制通道方法可以同时处理 GPI/GPO 和 I2C 传输,以及错误检测和重传。默认情况下不启用基于数据包的控制通道 I2C。 要启用基于数据包的 I2C,请在解串器中设置 PKTCC_EN = 1 并等待 2ms。 在此期间,解串器自动启用串行器中基于数据包的控制通道。数据包控制通道使用的内部比特率不依赖于主机 μC 使用的 I2C 比特率。 原始前向控制通道比特率与 PCLK 相同(例如,当 fPCLK 为 10MHz 时为 10Mbps)。原始反向信道比特率通常为 850kbps(当 HIM = 1 时为 425kbps)。 数据包长度为 9 位 + CRC 位长,并影响整体符号率。 较大的 CRC 位长度会降低整体符号率。
GPI/GPO 转换的延迟取决于数据包长度。 控制通道上 I2C 传输的延迟取决于传入/传出 SCL 速率和控制通道符号速率。 从串行器向解串器发送单个字节有 4 个 SCL 位时间 + 1.5 个符号的额外延迟。 从解串器向串行器发送单个字节有 5 个 SCL 位时间 + 1.5 个符号的额外延迟。
Cascaded/Parallel Devices(级联/并行设备)
GMSL 支持通过 I2C 连接的级联和并行设备。 当级联或使用并行链路时,所有 I2C 命令都转发到所有链路。 每条链路都试图保持控制信道,直到它从远程端设备接收到ACK/NACK为止。 为了防止超时,保持链路之间的控制通道处于活动状态很重要。 如果链路未使用,请通过打开配置链路、断开 I2C 线路或关闭未使用设备的电源来保持控制通道畅通。
Packet Protocol Summary
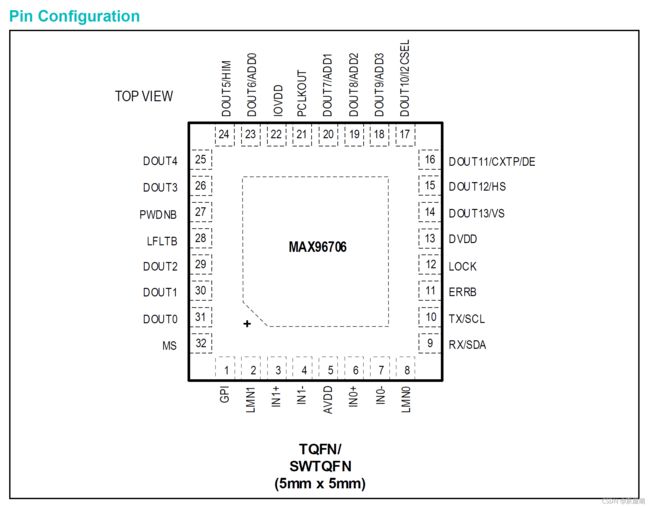
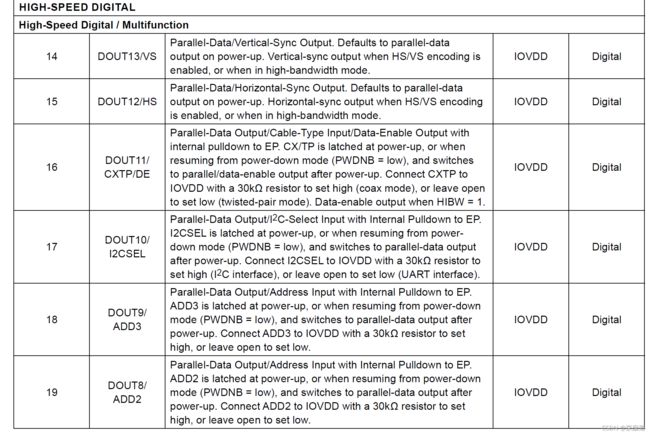
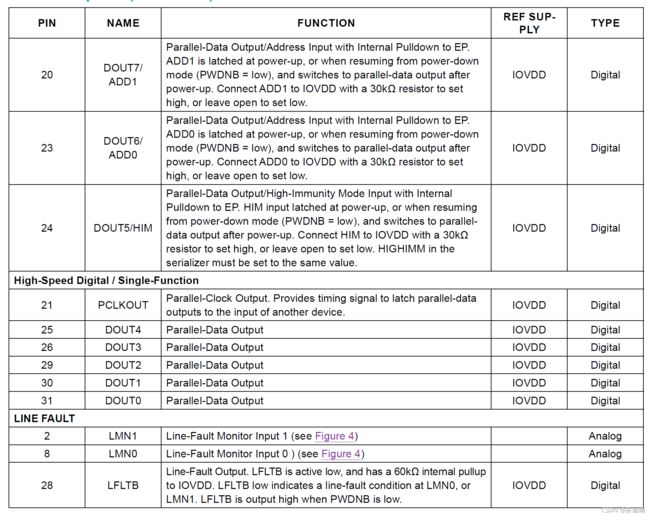
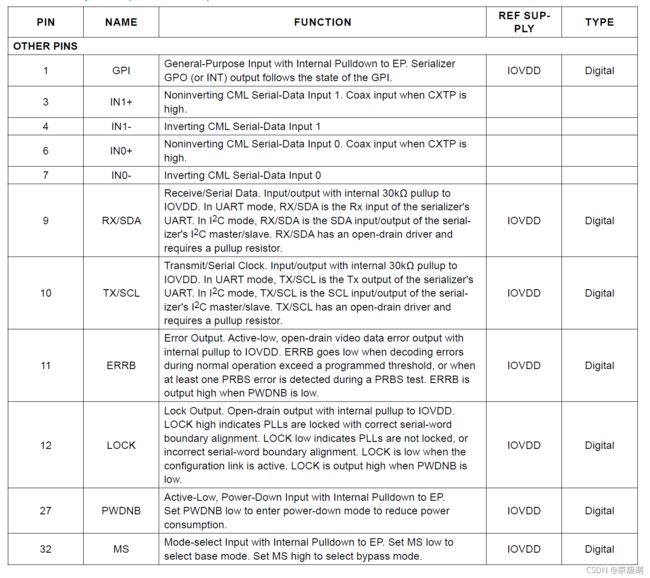
Pin Configuration
Register Map
seraddr (0x00)
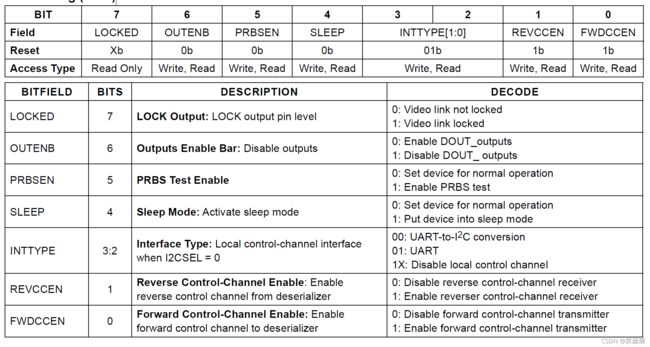
main config (0x04)
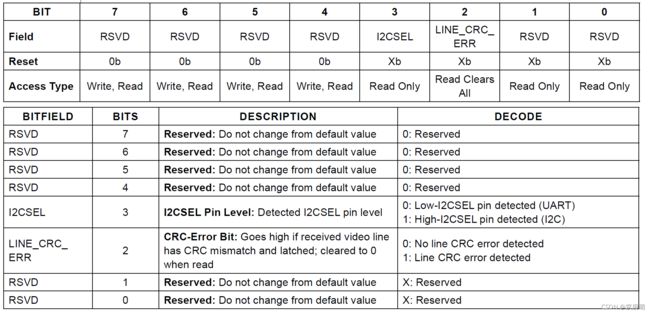
i2csel (0x1B)