Linux:利用匿名管道构建进程池
文章目录
- 进程池
- 实现进程池
-
- 创建信道和进程
- 发送任务
- 释放资源
- 进程池代码
- 总结
本篇的主题是借助前面所学的基础管道实现一个进程池,那么在实现进程池前先了解进程池是什么,进程池有什么意义,进而对于进程池有一个基本的把握
进程池
给定一个进程,为这个进程创建多个管道,并且对于每一个管道都设置一个子进程,当父进程发送消息,子进程就能获取到消息的内容,而父进程的存在价值就是控制子进程,并且给子进程布置服务等等,而这个内容就叫做进程池
在谈到进程池前,要先提及的是池化技术,池化技术是很重要的技术,在STL容器中也存在诸如空间配置器这样的内容,这种内容诞生的原因就是因为,在调用系统中的资源是需要成本的,例如有空间资源,时间资源等等,而如果不断的申请这些资源就会耗费多余的资源,于是诞生了池化技术,提前申请一块大的空间,由申请人自己来管理,这个就是基本的池化技术
在STL的空间配置器中就有这样的内容,利用空间配置器可以提前申请一部分内容,并且基于这个空间进行自我管理,随时进行申请,就能减少从系统中申请资源带来的额外的成本,而进程池也是基于这样的原理,系统调用也是有成本的,就连最基本的函数跳转都有成本,所以才出现了内联函数来帮助提高效率,更别说对于这样大型的系统调用的接口,必然是有成本的,因此借助池化技术来完成工作时有很大的必要的
实现进程池
对于本篇实现的这个进程池来说,功能也是比较简单的:
- 创建信道和进程
- 发送任务
- 回收资源
创建信道和进程
要实现进程池,就要先清楚进程池整体的结构是什么,对于进程池来说,首先要有进程,有管道,这都进程池创建的必要组成部分,那么在创建进程池的阶段就要实现这些内容,所以要先创建并定义管道
// 定义要创建的子进程个数
const int num = 5;
int main()
{
for (int i = 0; i < num; i++)
{
// 创建管道
int pipefd[2];
int n = pipe(pipefd);
assert(n == 0);
// 创建子进程
pid_t id = fork();
if (id == 0)
{
// 子进程负责读
close(pipefd[1]);
// do something...
cout << "this is child" << endl;
exit(0);
}
// 父进程负责写
close(pipefd[0]);
cout << "this is father" << endl;
}
return 0;
}
但是这样写固然是有问题的,问题点在于,父进程创建的子进程的数据会丢失,不利于进行管理,那么在管理这样的数据之前,首先要对这些内容进行描述,所以要创建对应的结构体进行描述,要管理的这些数据包括有,父进程管理的子进程的pid是多少,父进程和这个子进程传输的文件描述符下标是多少,最好还能用名字来管理,基于这些信息就能创建对应的描述结构体
class channel
{
public:
channel(int fd, pid_t id) : ctrlfd(fd), workerid(id)
{
name = "channel-" + to_string(number++);
}
public:
int ctrlfd;
pid_t workerid;
string name;
};
因此基于这个内容,就创建好了描述的内容,而可以创建一张表,用来描述存储信息的情况,这样父进程对于子进程的管理就转换成了对于顺序表的管理,这样就能对于数据做一个很好的管理工作,再对创建过程做出一个具体的封装,就能封装出下面的代码:
void Create(vector<channel> *c)
{
for (int i = 0; i < num; i++)
{
// 创建管道
int pipefd[2];
int n = pipe(pipefd);
assert(n == 0);
// 创建子进程
pid_t id = fork();
if (id == 0)
{
// 子进程负责读
close(pipefd[1]);
// do something...
cout << "this is child" << endl;
exit(0);
}
// 父进程负责写
close(pipefd[0]);
c->push_back(channel(pipefd[1], id));
}
}
int main()
{
vector<channel> channels;
Create(&channels);
return 0;
}
到此,封装的第一步就完成了,对象已经被创建完毕了
发送任务
对于任务这个版块,本篇的实现方式采用的是模拟调用的方式,给定三种调用的方式,然后利用随机调用的方式对这三种方式进行调用,用来模拟父进程给子进程派发任务这样的一个过程,具体的实现如下:
#pragma once
#include 将任务整合到函数体实现的对应位置,如下所示:
// 发送任务
void SendCommand(const vector<channel> &c, int count)
{
int pos = 0;
while (count--)
{
// 1. 选择任务
int command = init.SelectTask();
// 2. 选择信道(进程)
const auto &channel = c[pos++];
pos %= c.size();
// 3. 发送任务
write(channel.ctrlfd, &command, sizeof(command));
sleep(1);
}
cout << "SendCommand done" << endl;
}
释放资源
对于释放资源来讲,主体思路主要是将管道对应的读端和写端都关闭,这样就可以使得管道得以释放了,于是有初步的实现设计
void ReleaseChannels(vector<channel> c)
{
for (const auto &channel : c)
{
pid_t rid = waitpid(channel.workerid, nullptr, 0);
if (rid == channel.workerid)
{
std::cout << "wait child: " << channel.workerid << " success" << std::endl;
}
}
}
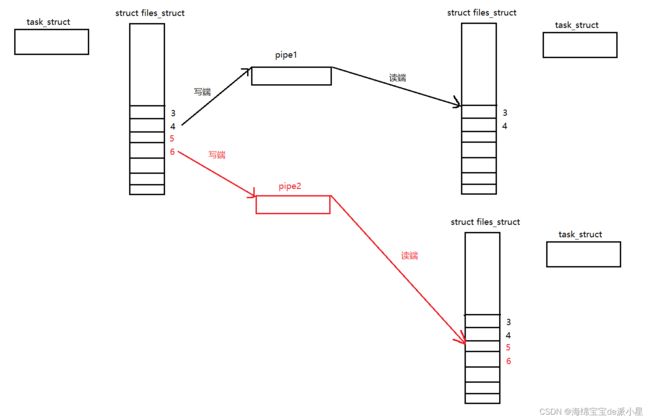
从表象上看,这样的释放过程是没有问题的,但是从深层次的角度来讲,代码中其实隐藏着一些问题,用下图来表示
下图所示的是在理想状态下,在操作系统内部应该形成的状态体系结构,但是实际上,这样的图是有问题的,在父进程创建子进程的时候,子进程会继承的还有父进程的文件描述符表,正是依据这个原理才能设计出管道这样的结构,但是在第二个子进程继承父进程时,也会继承一份指向,所以管道1的引用计数实际上是比想象的要多一个指针的
下图所示的是操作系统内部真正的示意图
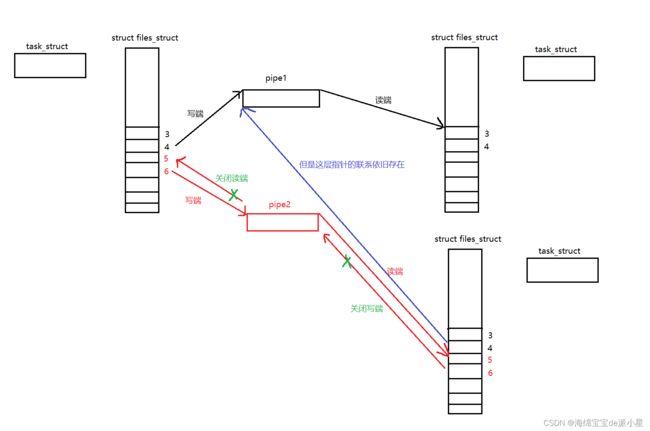
基于这样的原因,在进行设计的时候,可以记录之前已经打开的文件描述符,在后续创建子进程的时候刻意的将这些文件描述符都关掉,这样就可以解决问题
进程池代码
// task.hpp
#pragma once
#include // processpool.cc
#include 运行结果如下所示

总结
对于进程池来说,就是预先创建一批进程,然后让master进程直接向目标进程排放任务,这个进程被预先创建好之后,有任务就处理,没有任务就进行阻塞