【三相潮流】基于仿射区间的,含分布式电源的配电网三相潮流算法
1.软件版本
matlab2021a
2.本算法理论知识
当只采用区间运算,得到的结果则有可能过于保守,而采用仿射运算后,本文方法能够得到更窄的不确定区域,从而得到更窄的区间。
针对本课题要求,“基于仿射区间的含分布式电源的配电网三相潮流算法”,其中关于这方面的概念,主要从如下的三个方面角度考虑:
理想状态下的,确定性潮流计算——即对应本课题的“含分布式电源的配电网三相潮流算法”。
实际状态下,不确定性潮流计算,这里对应两个类型的算法:
a.基于区间算法的含分布式电源的配电网三相潮流算法,不过结果范围较大,过于保守。
b.基于仿射算法的含分布式电源的配电网三相潮流算法,其结果范围较小,效果较a更优。
传统的配电网中的节点类型一般是PQ节点,而加入分布式电源之后,会产生PV节点和PI节点,因此,在针对还有分布式电源的配电网进行潮流计算的时候,必须根据不同的节点类型采用不同的处理方法,但本质上就是在潮流计算的时候将各种类型的节点转换为潮流计算能够处理的PQ点或者PV点。

从上面的表格可知,本质上都转换为了PQ和PV节点的计算了。所以,最后在计算的时候,都转换为PQ和PV的计算了。
3.核心代码
clc;
clear;
close all;
warning off;
addpath 'func\'
PI_injection = 1;
PQ_injection = 2;
PV_injection = 3;
PIQ_injection = 4;
PIV_injection = 5;
PQV_injection = 6;
PIVQ_injection = 7;
SEL = PIQ_injection;
V_base = 7.3093; %电压基准
P_base = 10; %功率基准
eps = 1e-4; %收敛精度,由于忽略纵向电压,精度不宜设置过高
Max_Iteration = 50; %最大迭代次数
Z_base = V_base^2/P_base;
I_base = P_base ./ V_base;
%33节点
[branch,bus,DG] = func_IEEE33(SEL);
N = size(bus,1); %节点数
b = size(branch,1); %支路数
global PQNum;
global nPQ;
global PQbus;
global PVNum;
global nPV;
global PVbus;
global PINum;
global nPI;
global PIbus;
%A、S、U分别存储支路、节点和电压数据
[A,S,U] = func_ASU(branch,bus,Z_base,P_base);
%DG节点加入,PQ、PV型分别处理
[S,X0,DGpath] = func_PVPQPI(A,DG,S,P_base,b);
%生成节点的关联矩阵
[A0,DeltaU,Q,ZXinv,UDG] = func_Incidence_matrix(A,S,N,b,DG,X0,DGpath);
%%%%%%%%%%%%%%%%%%%%%%这里参考了下你的那个函数,所以以上几个函数功能和你提供的那个相似,这里将仿射部分加在了func_affine_system.m函数中%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%这里参考了下你的那个函数,所以以上几个函数功能和你提供的那个相似,这里将仿射部分加在了func_affine_system.m函数中%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%这里参考了下你的那个函数,所以以上几个函数功能和你提供的那个相似,这里将仿射部分加在了func_affine_system.m函数中%%%%%%%%%%%%%%%%%%%%%
%开始迭代,加入仿射算法的不确定潮流分析过程
%开始迭代,加入仿射算法的不确定潮流分析过程
[A_infor,B_infor,C_infor,U,DeltaSL] = func_affine_system(A,A0,U,S,DG,UDG,ZXinv,P_base,I_base,Q,DeltaU,Max_Iteration,N);
%基于仿射区间的,含分布式电源的配电网三相潮流算法
maxreal_phase1 = A_infor(1,:);
minreal_phase1 = A_infor(2,:);
maximag_phase1 = A_infor(3,:);
minimag_phase1 = A_infor(4,:);
maxreal_phase2 = B_infor(1,:);
minreal_phase2 = B_infor(2,:);
maximag_phase2 = B_infor(3,:);
minimag_phase2 = B_infor(4,:);
maxreal_phase3 = C_infor(1,:);
minreal_phase3 = C_infor(2,:);
maximag_phase3 = C_infor(3,:);
minimag_phase3 = C_infor(4,:);
%得到三相仿射的区间值
[V_abs_phase1] = func_affine_result(maxreal_phase1,minreal_phase1,maximag_phase1,minimag_phase1,N);
[V_abs_phase2] = func_affine_result(maxreal_phase2,minreal_phase2,maximag_phase2,minimag_phase2,N);
[V_abs_phase3] = func_affine_result(maxreal_phase3,minreal_phase3,maximag_phase3,minimag_phase3,N);
if SEL == 1
NAME = 'PI型DG注入';
end
if SEL == 2
NAME = 'PQ型DG注入';
end
if SEL == 3
NAME = 'PV型DG注入';
end
if SEL == 4
NAME = 'PI PQ型DG注入';
end
if SEL == 5
NAME = 'PIV型DG注入';
end
if SEL == 6
NAME = 'PQ PV型DG注入';
end
if SEL == 7
NAME = 'PI PQ PV型DG注入';
end
figure;
subplot(311);
plot(V_abs_phase1(:,1),'b-s');
hold on;
plot(V_abs_phase1(:,2),'r-o');
hold on;
plot(abs(U(:,2)),'k');
hold off;
xlabel('节点数');
ylabel('幅度值');
title([NAME,'A Phase']);
legend('down bands','up bands','certain trend');
disp('A相幅度值');
V_abs_phase1
subplot(312);
plot(V_abs_phase2(:,1),'b-s');
hold on;
plot(V_abs_phase2(:,2),'r-o');
hold on;
plot(abs(U(:,3)),'k');
hold off;
xlabel('节点数');
ylabel('幅度值');
title([NAME,'B Phase']);
legend('down bands','up bands','certain trend');
disp('B相幅度值');
V_abs_phase2
subplot(313);
plot(V_abs_phase3(:,1),'b-s');
hold on;
plot(V_abs_phase3(:,2),'r-o');
hold on;
plot(abs(U(:,4)),'k');
hold off;
xlabel('节点数');
ylabel('幅度值');
title([NAME,'C Phase']);
legend('down bands','up bands','certain trend');
disp('C相幅度值');
V_abs_phase3
fprintf(' 节点 A幅值下限 A幅值上限 B幅值下限 B幅值上限 C幅值下限 C幅值上限');
RR = [[1:33]',V_abs_phase1,V_abs_phase2,V_abs_phase3]
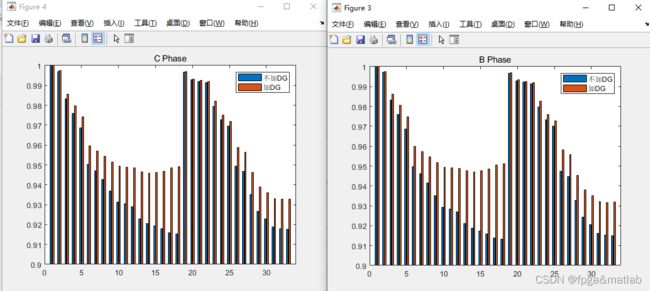
%是否加入分布式电源的对比
load func\No_DG.mat
figure;
r1 = [a,abs(U(:,2))];
bar(r1);
axis([0,34,0.9,1]);
legend('不加DG','加DG');
title('A Phase');
figure;
r2 = [b,abs(U(:,3))];
bar(r2);
axis([0,34,0.9,1]);
legend('不加DG','加DG');
title('B Phase');
figure;
r3 = [c,abs(U(:,4))];
bar(r3);
axis([0,34,0.9,1]);
legend('不加DG','加DG');
title('C Phase');
fprintf('网损');
DeltaSL*1000*P_base
4.操作步骤与仿真结论
5.参考文献
![]()
A02-21