色彩转换系列之RGB格式与HSI格式互转原理及实现
写在前面
HSI色彩空间是从人的视觉系统出发,直接用颜色三要素:色调(Hue)、饱和度(Saturation或Chroma)和亮度 (Intensity或Brightness)来描述色彩。
- H——表示颜色的相位角,是彩色最重要的属性,决定颜色的本质。红、绿、蓝分别相隔120度;互补色分别相差180度,即颜色的类别。
- S——表示颜色的深浅程度,饱和度越高,颜色越深。与白色的比例有关,白色比例越多,饱和度越低。
- I——表示色彩的明亮程度,人眼对亮度很敏感。
HSI彩色空间可以用一个圆锥空间模型来描述:
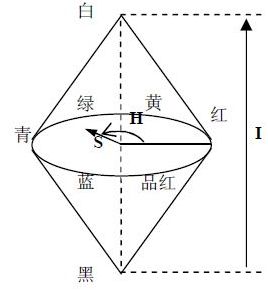
可以看到HSI色彩空间和RGB色彩空间只是同一物理量的不同表示法,因而它们之间存在着转换关系:HSI颜色模式中的色调使用颜色类别表示,饱和度与颜色的白光光亮亮度刚好成反比,代表灰色与色调的比例,亮度是颜色的相对明暗程度。
由于人的视觉对亮度的敏感程度远强于对颜色浓淡的敏感程度,为了便于颜色处理和识别,人的市局系统经常采用HSI彩色空间,它比RGB空间更符合人的视觉特性。此外,由于HSI空间中亮度和色度具有可分离性,使得图像处理和机器视觉中大量灰度处理算法都可在HSI空间方便进行。笔者此前做过一个矫正人脸图像偏光的小项目,用到的某算法的关键一步即是在HSI空间中进行亮度矫正。
应用:可以用于偏光矫正、去除阴影、图像分割等。
RGB与HSI相互转换
1、RGB2HSI
假定RGB值归一化为[0,1]范围内,色调H可以用得到的值除以360归一化,其他两个分量已经在[0,1]范围之内了。
2、HSI2RGB
0=< H < 120:
120=< H < 240: 首先H=H-120°
240=< H < 360: 首先H=H-240°
实现
#include
#include
#include
#include
using namespace cv;
Mat RGB2HSI(Mat src){
int row = src.rows;
int col = src.cols;
Mat dsthsi(row, col, CV_64FC3);
Mat H = Mat(row, col, CV_64FC1);
Mat S = Mat(row, col, CV_64FC1);
Mat I = Mat(row, col, CV_64FC1);
for (int i = 0; i < row; i++){
for (int j = 0; j < col; j++){
double h, s, newi, th;
double B = (double)src.at(i, j)[0] / 255.0;
double G = (double)src.at(i, j)[1] / 255.0;
double R = (double)src.at(i, j)[2] / 255.0;
double mi, mx;
if (R > G && R > B){
mx = R;
mi = min(G, B);
}
else{
if (G > B){
mx = G;
mi = min(R, B);
}
else{
mx = B;
mi = min(R, G);
}
}
newi = (R + G + B) / 3.0;
if (newi < 0) newi = 0;
else if (newi > 1) newi = 1.0;
if (newi == 0 || mx == mi){
s = 0;
h = 0;
}
else{
s = 1 - mi / newi;
th = (R - G) * (R - G) + (R - B) * (G - B);
th = sqrt(th) + 1e-5;
th = acos(((R - G + R - B)*0.5) / th);
if (G >= B) h = th;
else h = 2 * CV_PI - th;
}
h = h / (2 * CV_PI);
H.at(i, j) = h;
S.at(i, j) = s;
I.at(i, j) = newi;
dsthsi.at(i, j)[0] = h ;
dsthsi.at(i, j)[1] = s;
dsthsi.at(i, j)[2] = newi;
}
}
return dsthsi;
}
Mat HSI2RGB(Mat src){
int row = src.rows;
int col = src.cols;
Mat dst(row, col, CV_64FC3);
for (int i = 0; i < row; i++){
for (int j = 0; j < col; j++){
double preh = src.at(i, j)[0] * 2 * CV_PI;//H
double pres = src.at(i, j)[1]; //S
double prei = src.at(i, j)[2]; //I
double r = 0, g = 0, b = 0;
double t1, t2, t3;
t1 = (1.0 - pres) / 3.0;
if (preh >= 0 && preh < (CV_PI * 2 / 3)){
b = t1;
t2 = pres * cos(preh);
t3 = cos(CV_PI / 3 - preh);
r = (1 + t2 / t3) / 3;
r = 3 * prei * r;
b = 3 * prei * b;
g = 3 * prei - (r + b);
}
else if (preh >= (CV_PI * 2 / 3) && preh < (CV_PI * 4 / 3)){
r = t1;
t2 = pres * cos(preh - 2 * CV_PI / 3);
t3 = cos(CV_PI - preh);
g = (1 + t2 / t3) / 3;
r = 3 * prei * r;
g = 3 * g * prei;
b = 3 * prei - (r + g);
}
else if (preh >= (CV_PI * 4 / 3) && preh <= (CV_PI * 2)){
g = t1;
t2 = pres * cos(preh - 4 * CV_PI / 3);
t3 = cos(CV_PI * 5 / 3 - preh);
b = (1 + t2 / t3) / 3;
g = 3 * g * prei;
b = 3 * prei * b;
r = 3 * prei - (g + b);
}
dst.at(i, j)[0] = b;
dst.at(i, j)[1] = g;
dst.at(i, j)[2] = r;
}
}
return dst;
}
int main(){
cv::Mat src = cv::imread("I:/Learning-and-Practice/2019Change/Image process algorithm/Img/002.jpg");
if (src.empty()){
return -1;
}
cv::Mat dst, dst2;
//RGB2HSI//
double t1 = (double)cv::getTickCount(); //测时间
dst = RGB2HSI(src); //RGB2HSI
dst2 = HSI2RGB(dst); //HSI2BGR
//std::cout << dst << std::endl;
t1 = (double)cv::getTickCount() - t1;
double time1 = (t1 *1000.) / ((double)cv::getTickFrequency());
std::cout << "My_RGB2HSI=" << time1 << " ms. " << std::endl << std::endl;
cv::namedWindow("src", CV_WINDOW_NORMAL);
imshow("src", src);
cv::namedWindow("My_RGB2HSI", CV_WINDOW_NORMAL);
imshow("My_RGB2HSI", dst);
cv::namedWindow("My_HSI2RGB", CV_WINDOW_NORMAL);
imshow("My_HSI2RGB", dst2);
cv::waitKey(0);
return 0;
} 效果
找了张有阴影的图:


参考:
https://blog.csdn.net/just_sort/article/details/87102898
《精通Matlab数字图像处理与识别》