在树莓派下使用NCNN部署YOLOv5-lite
前置的开发环境操作可以先看这篇文章:树莓派下部署NCNN_树莓派部署神经网络
我这里的yolov5-lite的param文件和bin文件是参考这个github项目,里面作者有在coco数据集上训练好的yolov5-lite的param文件和bin文件,需要训练自己的数据集的可以按照github教程来做。
我下载了yolov5-lite_e的版本,以这个为例子
将转换后的文件放到ncnn工程的examples目录下,新建一个yolov5_lite_e.cpp文件,输入以下代码
#include "layer.h"
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include
#include
#include
#endif
#include
#include
#include
#include
// 0 : FP16
// 1 : INT8
#define USE_INT8 0
// 0 : Image
// 1 : Camera
#define USE_CAMERA 0
struct Object
{
cv::Rect_ rect;
int label;
float prob;
};
static inline float intersection_area(const Object& a, const Object& b)
{
cv::Rect_ inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector& faceobjects, int left, int right)
{
int i = left;
int j = right;
float p = faceobjects[(left + right) / 2].prob;
while (i <= j)
{
while (faceobjects[i].prob > p)
i++;
while (faceobjects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(faceobjects[i], faceobjects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsort_descent_inplace(faceobjects, left, j);
}
#pragma omp section
{
if (i < right) qsort_descent_inplace(faceobjects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector& faceobjects)
{
if (faceobjects.empty())
return;
qsort_descent_inplace(faceobjects, 0, faceobjects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector& faceobjects, std::vector& picked, float nms_threshold)
{
picked.clear();
const int n = faceobjects.size();
std::vector areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = faceobjects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const Object& a = faceobjects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = faceobjects[picked[j]];
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
static inline float sigmoid(float x)
{
return static_cast(1.f / (1.f + exp(-x)));
}
// unsigmoid
static inline float unsigmoid(float y) {
return static_cast(-1.0 * (log((1.0 / y) - 1.0)));
}
static void generate_proposals(const ncnn::Mat &anchors, int stride, const ncnn::Mat &in_pad,
const ncnn::Mat &feat_blob, float prob_threshold,
std::vector &objects) {
const int num_grid = feat_blob.h;
float unsig_pro = 0;
if (prob_threshold > 0.6)
unsig_pro = unsigmoid(prob_threshold);
int num_grid_x;
int num_grid_y;
if (in_pad.w > in_pad.h) {
num_grid_x = in_pad.w / stride;
num_grid_y = num_grid / num_grid_x;
} else {
num_grid_y = in_pad.h / stride;
num_grid_x = num_grid / num_grid_y;
}
const int num_class = feat_blob.w - 5;
const int num_anchors = anchors.w / 2;
for (int q = 0; q < num_anchors; q++) {
const float anchor_w = anchors[q * 2];
const float anchor_h = anchors[q * 2 + 1];
const ncnn::Mat feat = feat_blob.channel(q);
for (int i = 0; i < num_grid_y; i++) {
for (int j = 0; j < num_grid_x; j++) {
const float *featptr = feat.row(i * num_grid_x + j);
// find class index with max class score
int class_index = 0;
float class_score = -FLT_MAX;
float box_score = featptr[4];
if (prob_threshold > 0.6) {
// while prob_threshold > 0.6, unsigmoid better than sigmoid
if (box_score > unsig_pro) {
for (int k = 0; k < num_class; k++) {
float score = featptr[5 + k];
if (score > class_score) {
class_index = k;
class_score = score;
}
}
float confidence = sigmoid(box_score) * sigmoid(class_score);
if (confidence >= prob_threshold) {
float dx = sigmoid(featptr[0]);
float dy = sigmoid(featptr[1]);
float dw = sigmoid(featptr[2]);
float dh = sigmoid(featptr[3]);
float pb_cx = (dx * 2.f - 0.5f + j) * stride;
float pb_cy = (dy * 2.f - 0.5f + i) * stride;
float pb_w = pow(dw * 2.f, 2) * anchor_w;
float pb_h = pow(dh * 2.f, 2) * anchor_h;
float x0 = pb_cx - pb_w * 0.5f;
float y0 = pb_cy - pb_h * 0.5f;
float x1 = pb_cx + pb_w * 0.5f;
float y1 = pb_cy + pb_h * 0.5f;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = confidence;
objects.push_back(obj);
}
} else {
for (int k = 0; k < num_class; k++) {
float score = featptr[5 + k];
if (score > class_score) {
class_index = k;
class_score = score;
}
}
float confidence = sigmoid(box_score) * sigmoid(class_score);
if (confidence >= prob_threshold) {
float dx = sigmoid(featptr[0]);
float dy = sigmoid(featptr[1]);
float dw = sigmoid(featptr[2]);
float dh = sigmoid(featptr[3]);
float pb_cx = (dx * 2.f - 0.5f + j) * stride;
float pb_cy = (dy * 2.f - 0.5f + i) * stride;
float pb_w = pow(dw * 2.f, 2) * anchor_w;
float pb_h = pow(dh * 2.f, 2) * anchor_h;
float x0 = pb_cx - pb_w * 0.5f;
float y0 = pb_cy - pb_h * 0.5f;
float x1 = pb_cx + pb_w * 0.5f;
float y1 = pb_cy + pb_h * 0.5f;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = confidence;
objects.push_back(obj);
}
}
}
}
}
}
}
static int detect_yolov5(const cv::Mat& bgr, std::vector& objects)
{
ncnn::Net yolov5;
#if USE_INT8
yolov5.opt.use_int8_inference=true;
#else
yolov5.opt.use_vulkan_compute = true;
yolov5.opt.use_bf16_storage = true;
#endif
// original pretrained model from https://github.com/ultralytics/yolov5
// the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models
#if USE_INT8
yolov5.load_param("weights/e.param");
yolov5.load_model("weights/e.bin");
#else
yolov5.load_param("ncnn/examples/v5lite-e.param");
yolov5.load_model("ncnn/examples/v5lite-e.bin");
#endif
const int target_size = 320;
const float prob_threshold = 0.60f;
const float nms_threshold = 0.60f;
int img_w = bgr.cols;
int img_h = bgr.rows;
// letterbox pad to multiple of 32
int w = img_w;
int h = img_h;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, img_w, img_h, w, h);
// pad to target_size rectangle
// yolov5/utils/datasets.py letterbox
int wpad = (w + 31) / 32 * 32 - w;
int hpad = (h + 31) / 32 * 32 - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 114.f);
const float norm_vals[3] = {1 / 255.f, 1 / 255.f, 1 / 255.f};
in_pad.substract_mean_normalize(0, norm_vals);
ncnn::Extractor ex = yolov5.create_extractor();
ex.input("images", in_pad);
std::vector proposals;
// stride 8
{
ncnn::Mat out;
// ex.extract("451", out);
ex.extract("output", out);
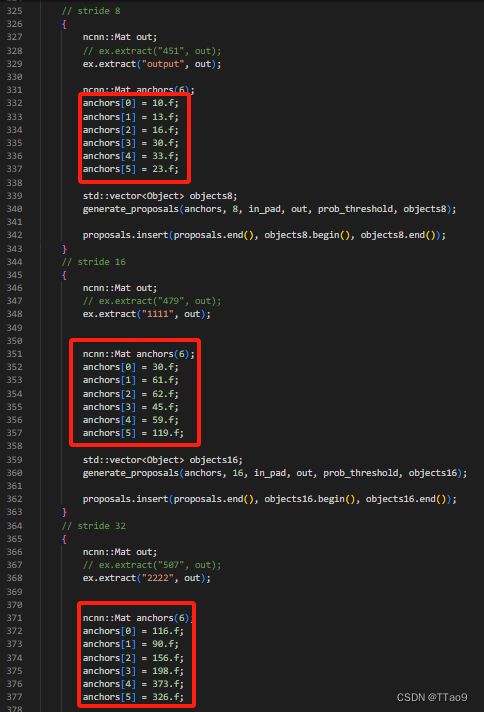
ncnn::Mat anchors(6);
anchors[0] = 10.f;
anchors[1] = 13.f;
anchors[2] = 16.f;
anchors[3] = 30.f;
anchors[4] = 33.f;
anchors[5] = 23.f;
std::vector objects8;
generate_proposals(anchors, 8, in_pad, out, prob_threshold, objects8);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());
}
// stride 16
{
ncnn::Mat out;
// ex.extract("479", out);
ex.extract("1111", out);
ncnn::Mat anchors(6);
anchors[0] = 30.f;
anchors[1] = 61.f;
anchors[2] = 62.f;
anchors[3] = 45.f;
anchors[4] = 59.f;
anchors[5] = 119.f;
std::vector objects16;
generate_proposals(anchors, 16, in_pad, out, prob_threshold, objects16);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());
}
// stride 32
{
ncnn::Mat out;
// ex.extract("507", out);
ex.extract("2222", out);
ncnn::Mat anchors(6);
anchors[0] = 116.f;
anchors[1] = 90.f;
anchors[2] = 156.f;
anchors[3] = 198.f;
anchors[4] = 373.f;
anchors[5] = 326.f;
std::vector objects32;
generate_proposals(anchors, 32, in_pad, out, prob_threshold, objects32);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());
}
// sort all proposals by score from highest to lowest
qsort_descent_inplace(proposals);
// apply nms with nms_threshold
std::vector picked;
nms_sorted_bboxes(proposals, picked, nms_threshold);
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x - (wpad / 2)) / scale;
float y0 = (objects[i].rect.y - (hpad / 2)) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale;
// clip
x0 = std::max(std::min(x0, (float)(img_w - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(img_h - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(img_w - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(img_h - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
return 0;
}
static void draw_objects(const cv::Mat& bgr, const std::vector& objects)
{
static const char* class_names[] = {
"face","face_mask"
};
cv::Mat image = bgr.clone();
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
fprintf(stderr, "%d = %.5f at %.2f %.2f %.2f x %.2f\n", obj.label, obj.prob,
obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
cv::rectangle(image, obj.rect, cv::Scalar(0, 255, 0));
char text[256];
sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(image, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
#if USE_CAMERA
imshow("camera", image);
cv::waitKey(1);
#else
cv::imwrite("result.jpg", image);
#endif
}
#if USE_CAMERA
int main(int argc, char** argv)
{
cv::VideoCapture capture;
capture.open(0); //修改这个参数可以选择打开想要用的摄像头
cv::Mat frame;
while (true)
{
capture >> frame;
cv::Mat m = frame;
std::vector objects;
detect_yolov5(frame, objects);
draw_objects(m, objects);
if (cv::waitKey(30) >= 0)
break;
}
}
#else
int main(int argc, char** argv)
{
if (argc != 2)
{
fprintf(stderr, "Usage: %s [imagepath]\n", argv[0]);
return -1;
}
const char* imagepath = argv[1];
struct timespec begin, end;
long time;
clock_gettime(CLOCK_MONOTONIC, &begin);
cv::Mat m = cv::imread(imagepath, 1);
if (m.empty())
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
std::vector objects;
detect_yolov5(m, objects);
clock_gettime(CLOCK_MONOTONIC, &end);
time = (end.tv_sec - begin.tv_sec) + (end.tv_nsec - begin.tv_nsec);
printf(">> Time : %lf ms\n", (double)time/1000000);
draw_objects(m, objects);
return 0;
}
#endif
需要修改279,280行的文件路径
在ncnn/examples/CMakeLists.txt中添加一行
其他例子可以给注释掉加快编译,之后后面的yolov5-lite_e跟你新建的cpp文件名字一样,
之后进入ncnn工程,输入以下命令
mkdir build_example
cd build_example
cmake -DCMAKE_BUILD_TYPE=Release -DNCNN_VULKAN=OFF -DNCNN_BUILD_EXAMPLES=ON -DCMAKE_TOOLCHAIN_FILE=../toolchains/pi3.toolchain.cmake ..
make -j4
之后编译通过就行,在build_example/example文件夹下找到可执行文件yolov5_lite_e,输入
./yolov5_lite_e 图片路径
之后文件夹下会有生成一个result.jpg文件
如果你想调用的是摄像头实时检测,可以改动cpp文件里面36行的
#define USE_CAMERA 1
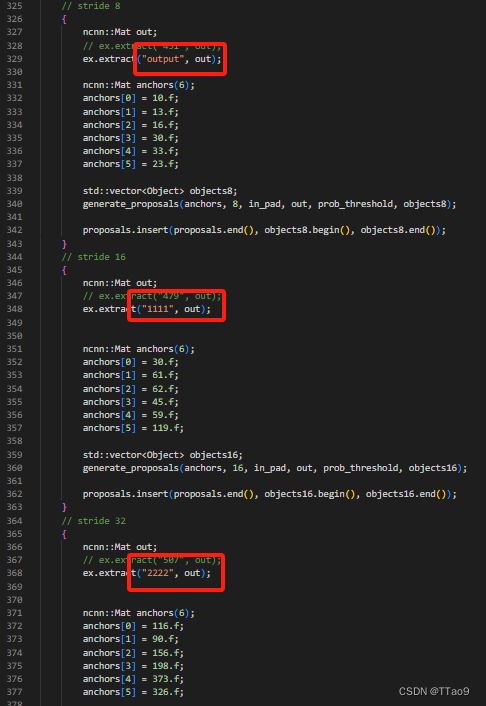
在部署过程中遇到的运行可执行文件时输出“Segmentation fault”
这是由于未修改cpp中ex.extract()和permute保持一致
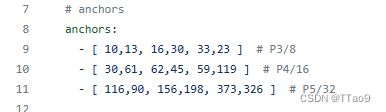
这里需要上面的yolov5_lite_e.cpp的这段代码
中的anchor与该工程里面的YOLOv5-Lite/models/v5Lite-e.yaml at master · ppogg/YOLOv5-Lite (github.com)
这里对应,除此之外,还有打开yolov5-lite.param文件,yolov5_lite_e.cpp代码中的这几处
要对应上param文件里面的这几处的名称