【20210326期AI简报】用RISC-V微控制器开发难不难?行人搜索AI框架新突破~
导读:本期为 AI 简报 20210326 期,将为您带来 9 条相关新闻,明日朝花节,有时候要冲,有时候也要出去走走~
本文一共 字,通篇阅读结束需要 7~11 分钟
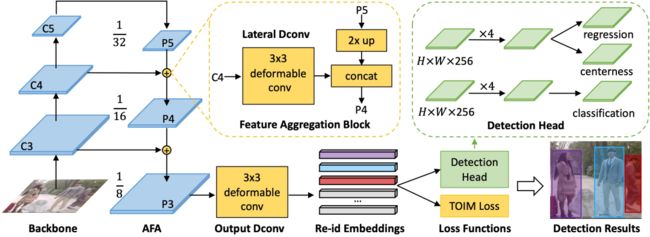
1. 首个无需锚框(Anchor-Free)的行人搜索框架 | CVPR 2021 | CVer、
Paper:
https://arxiv.org/abs/2103.11617
GIthub:
https://github.com/daodaofr/AlignPS
近三年来,行人搜索问题已经受到了广大学者的关注,在各个顶会上也陆续出现了诸多新方法。目前方法主要包括两步走(Two-Step)和一步走(One-Step)方法。
现有的大多数工作采用Faster-RCNN之类的二阶段(Two-Stage)检测器,产生令人鼓舞的精度,但计算开销很大。
在这项工作中,本文提出了以功能为导向的人员搜索网络(AlignPS),这是第一个无需锚定的框架,可以有效地解决这一艰巨的任务。AlignPS明确解决了主要挑战,在为该任务配备无锚探测器时,我们将其概括为不同级别(即,比例,区域和任务)的不对齐问题。进一步来说,我们提出一种对齐的特征聚合模块,以遵循“重新识别优先”的原则生成更具判别力和鲁棒性的特征嵌入。如此简单的设计可将CUHK-SYSU的基线免锚模型直接提高mAP超过20%。此外,AlignPS具有更高的速度,胜过最新的两阶段方法。
2. Super SloMo:用神经网络脑补超级慢动作 | HyperAI超神经
Paper:
https://arxiv.org/pdf/1712.00080.pdf
Github:
https://github.com/avinashpaliwal/Super-SloMo
教程链接:
https://openbayes.com/console/openbayes/containers/xQIPlDQ0GyD/overview
如今,人们对于视频帧率的追求越来越高,因为高帧率视频更加顺滑、流畅,能极大地提升人们的观看体验。
现有相机拍摄的视频帧率,也从 25 FPS(Frames Per Second) 不断提升到 60 FPS,再到 240 FPS 甚至更高。
 图片
图片
为了解决视频画面卡顿、不够顺畅等问题,视频插帧大法应运而生。英伟达提出的 Super SloMo 方法在众多方法中一骑绝尘,堪称业界经典。
对于一段普通设备录制的视频,能「脑补」出高帧率慢动作视频。有了这一神器,视频制作的门槛得到进一步降低。

3. YOLObile:面向移动设备的「实时目标检测」算法 | 我爱计算机视觉
Paper:
https://arxiv.org/abs/2009.05697
Github:
https://github.com/nightsnack/YOLObile
分享一篇AAAI 2021录用论文:YOLObile: Real-Time Object Detection on Mobile Devices via Compression-Compilation Co-Design作者来自于美国东北大学、匹兹堡大学和William & Mary。
作者提出了一种通过从压缩、编译两个角度,在保证模型准确率的基础上,减小模型的大小,并提升模型在移动设备端的运行速度。
通过所提出的YOLObile framework,将YOLOv4压缩了14倍,准确率保持在49.0mAP,在Samsung Galaxy S20上使用GPU,推理速度为17FPS;使用所提出的CPU-GPU合作机制,推理速度可以提升至19FPS,是原始的YOLOv4的5倍。目前代码已经开源。
4. 世界上最难的“沙雕”游戏被AI攻破了 | 量子位
图片Github:
https://github.com/Wesleyliao/QWOP-RL
13年以前,有这样一款“变态”级难度的游戏曾风靡一时。
它的名字简单粗暴——QWOP。意思是让玩家用这四个键位控制游戏人物的左右大腿和小腿,以最快的速度跑完100米。
如果你能跑出几米远,绝对算是一个高手,甚至能在朋友面前炫耀一番。
看到这款“沙雕游戏”,你是不是会想到强化学习来训练双足机器人的画面?
一位来自波士顿咨询的数据分析师Wesley Liao也是这么想的。
Liao综合了之前多种强化学习算法,最后甚至请来了“世界名师”教学,费了好大一番功夫,才终于让AI在上周打破人类玩家的记录。

5. 太真实了!工业界AI项目落地血泪教训总结 | CVer

原文:
https://zhuanlan.zhihu.com/p/336671388
人工智能是近几年最火热的技术名词,如果不谈人工智能相当于落伍,
但当真正进入人工智能领域时才发现,
一开始以为“拦路虎”是算法,后面发现落地是一个巨大的难题。
AI虐我千百遍,我待AI如初恋。什么才是好AI?
答:能落地的AI才是好AI。
AI项目从无到有,最终落地开花,无非不是挖坑、踩坑、填坑的过程。
本文从作者的经历和经验教训展开,阐述了在AI项目研发中的各个环节的重要细节点,展现了一个AI项目到最终落地繁琐的过程。
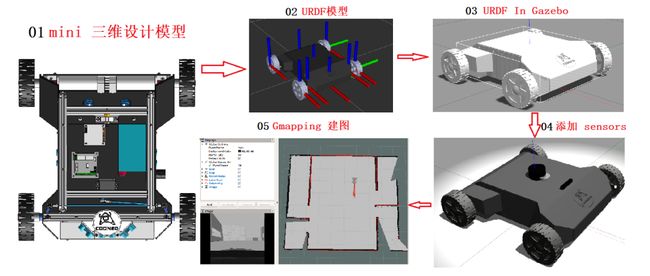
6. 从零开始搭建一台ROS开源迷你无人车 | COONEO
Github:
https://github.com/COONEO/neor_mini.git
之前我们生动的给大家讲了机器人仿真,比如为什么要仿真等---机器人拍了拍你,仿真测试了解一下,今天我们给大家讲讲具体怎们从零开始一步一步仿真一台迷你无人车。
这里所说的“从零开始搭建一台ROS开源迷你无人车”指的是利用NEOR mini无人车的urdf模型文件,
结合Gazebo物理仿真引擎和ROS开源社区的算法功能包,
在Ubuntu + ROS开发环境下模拟出一台和NEOR mini实体无人车功能一致的仿真无人车。
开发环境:ubuntu 18.04 +ROS-Melodic-desktop-full
wiki安装指引:
http://wiki.ros.org/melodic/Installation/Ubuntu
实现的过程如下图所示:
7. 为什么RISC-V受追捧?用RISC-V微控制器开发难不难?本文告诉你~ | 得捷电子DigiKey
 image-20210326171248862
image-20210326171248862
Github:
https://github.com/mwelling/freedom-e-sdk.git
在不断创新并保护其知识产权 (IP) 的同时,还需兼顾低功耗和低成本,这使得设计人员持续面临着压力。因此,对于移动应用处理器的设计人员而言,RISC-V开源硬件指令集架构 (ISA) 值得留意。既然RISC-V已成为微控制器的一个选项,嵌入式系统和消费类设备的设计人员需要学习如何着手将RISC-V整合至自己的设计。
GroupGets LLC的FE310 LoFive-R1开发板为此提供了一条捷径。在介绍LoFive-R1之前,本文将介绍RISC-V并说明开发人员应考虑使用该架构的原因。然后,本文将详细介绍LoFive-R1,说明如何着手应用开发以及可用的一些技巧与诀窍。
8. 图片可隐藏zip和mp3文件,只需修改后缀名,这个GitHub项目火了 | 量子位
 图片
图片
带压缩包的图片地址:
https://i.imgur.com/kNhGrN3.pngDavid Buchanan的Twitter:
https://twitter.com/David3141593/status/1371974874856587268Github:
https://github.com/DavidBuchanan314/tweetable-polyglot-png
明明下载的是一张图片,只需修改后缀名,图片就变成了一首歌,一串Python代码。
国外黑客David Buchanan利用Twitter的漏洞,可以用图片伪装的方式传输一份“加密”文件,前提是不超过3MB。
他成功把这种藏匿文件的GitHub源代码压缩到图片中。
现在你只要去他的Twitter,把这张图片下载下来,并将文件后缀名从.png修改为.zip,即可解压为Github代码。
Buchanan的新方法现在将藏匿文件体积增加到3MB,你甚至能放入一首歌。
Buchanan的这一发现已经连续多天成为GitHub热门项目,最终在周末登上日榜第一。
使用方法很简单,只需要将pack.py文件下载到本地,运行以下代码:
1python3 pack.py cover.png file.zip output.png
其中,cover.png是封面图片,file.zip是你要藏匿的文件,output.png是输出结果的文件名。
从外观上来看,output.png和cover.png是一样的,但多出一个压缩包的大小。
9. 刷题太遭罪怎么办?这个算法基地专为小白量身打造,还带动画 | 机器之心
 图片
图片
Github:
https://github.com/chefyuan/algorithm-base
刷题大纲:
https://mp.weixin.qq.com/s/fTMzLrv5Ou2Xf3_br80J0g
算法很重要,但算法也是学起来最难,最令人生畏的。算法千千万,不知该如何下手?
经常看到有人抱怨:刚开始刷题时,自己很迷茫,不知道从何刷起,也看不懂别人写的题解。思路飞来飞去,有时候以为是这个知识点重要,但有时又认为自己走错了路,结果学了半天,越刷越乱,时间、经历都白白浪费。
其实,学算法,刷题蛮干是不行的,需要遵循科学的方法。
学习算法可能并不只是拼智商,可以通过后天的学习进行掌握,这就需要讲究技巧。方法找对了,可以起到事半功倍的效果。
近日,在 Github 上就有人开源了一个项目,该项目是专门为刚开始刷题的同学准备的算法基地,项目作者立志用动画将晦涩难懂的算法说得通俗易懂。上线仅仅两天,收获九百多星。
![]()
其他
![]()
AMD的PyTorch机器学习工具,现在是一个Python包了
大范围行人和车辆检测,天池PANDA比赛技术解析
当GAN生成图像可以卡音效,这个Python包只需几行代码就能实现「音画同步」
全球首个内河无人驾驶数据集公布!清华大学等高校联合AI公司开发
![]()
![]()
嵌入式代码质量与开发效率技术沙龙深圳、上海、北京三城巡回开始啦
RT-Thread联合鉴释科技分享双方在嵌入式软件领域多年积累的保证代码质量的一些经验和方法,助力小伙伴提升代码质量,欢迎小伙伴报名参加

扫码报名
???????????? 点击阅读原文报名