Android Sensor模块解析(Sensor Hidl服务)
文章目录
- 前言
- 一、Hidl服务的启动
- 二、Sensor注册监听调用流程(Hidl层)
- 三、Sensor接收数据流程(Hidl层)
前言
Sensor Hidl服务在眼镜中是一个[email protected]进程
![]()
它其实是sensor hal的hidl实现,sensor hal也是在这个进程中的。
Sensor hidl的代码位置主要在
/hardware/interfaces/sensors/2.1/multihal/
/hardware/interfaces/sensors/common/default/2.X/multihal/
一、Hidl服务的启动
在rc中去启动该hidl,启动的进程为[email protected]
/hardware/interfaces/sensors/2.1/multihal/[email protected]
service vendor.sensors-hal-2-1-multihal /vendor/bin/hw/android.hardware.sensors@2.1-service.multihal
class hal
user system
group system wakelock context_hub
writepid /dev/cpuset/system-background/tasks
capabilities BLOCK_SUSPEND
rlimit rtprio 10 10
New 一个 HalProxyV2_1对象并注册为服务。
/hardware/interfaces/sensors/common/default/2.X/multihal/include/HalProxy.h
class HalProxyV2_1 : public IHalProxy<V2_1::ISensors> {
......
};
class IHalProxy : public HalProxy, public ISensorsVersion {
......
};
因此实际是调用了HalProxy的无参构造函数
/hardware/interfaces/sensors/common/default/2.X/multihal/HalProxy.cpp
HalProxy::HalProxy() {
const char* kMultiHalConfigFile = "/vendor/etc/sensors/hals.conf";
initializeSubHalListFromConfigFile(kMultiHalConfigFile);
init();
}
这里会有一个/vendor/etc/sensors/hals.conf文件,在高通的平台下,这个文件里的内容是"sensors.ssc.so",既是高通hal编译出的内容。
initializeSubHalListFromConfigFile方法中,会打开该so文件,并使用dlsym方法来尝试找到高通hal中sensorsHalGetSubHal_2_1函数的地址,之后调用该地址的函数从而调用到了高通hal中的sensorsHalGetSubHal_2_1方法取得subHal。之后根据该subHal来构造SubHalWrapperV2_1对象,并加入了mSubHalList中
mSubHalList是一个列表,可以放多个SubHalWrapperV2_1对象。这个体现了sensor_multihal的作用,即可以统一管理多个厂商sensor的hal。
/hardware/interfaces/sensors/common/default/2.X/multihal/HalProxy.cpp
void HalProxy::initializeSubHalListFromConfigFile(const char* configFileName) { std::ifstream subHalConfigStream(configFileName);
if (!subHalConfigStream) {
ALOGE("Failed to load subHal config file: %s", configFileName);
} else {
std::string subHalLibraryFile;
while (subHalConfigStream >> subHalLibraryFile) {
void* handle = getHandleForSubHalSharedObject(subHalLibraryFile);
......
} else {
SensorsHalGetSubHalV2_1Func* getSubHalV2_1Ptr =
(SensorsHalGetSubHalV2_1Func*)dlsym(handle, "sensorsHalGetSubHal_2_1");
if (getSubHalV2_1Ptr == nullptr) {
ALOGE("Failed to locate sensorsHalGetSubHal function for library: %s",
subHalLibraryFile.c_str());
} else {
std::function<SensorsHalGetSubHalV2_1Func> sensorsHalGetSubHal_2_1 =
*getSubHalV2_1Ptr;
uint32_t version;
ISensorsSubHalV2_1* subHal = sensorsHalGetSubHal_2_1(&version);
......
ALOGV("Loaded SubHal from library: %s", subHalLibraryFile.c_str());
mSubHalList.push_back(std::make_unique<SubHalWrapperV2_1>(subHal));
}
}
}
}
}
}
}
如果是高通平台的话,则sensorsHalGetSubHal_2_1方法的实现是在高通的sensors.ssc.so中,这里hal部分我们不再继续分析,后续有机会参与高通项目的可以查看这部分代码。
二、Sensor注册监听调用流程(Hidl层)
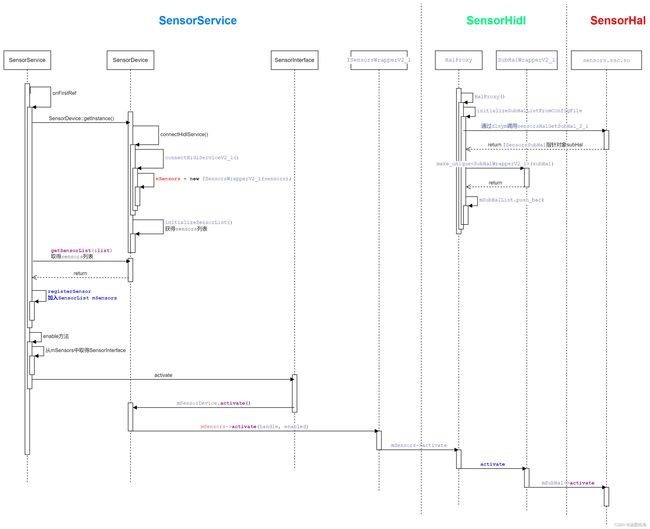
接上之前Android Sensor模块解析(Sensor系统服务)的,SensorService调用了enable方法。
/frameworks/native/services/sensorservice/SensorService.cpp
status_t SensorService::enable(const sp<SensorEventConnection>& connection,
int handle, nsecs_t samplingPeriodNs, nsecs_t maxBatchReportLatencyNs, int reservedFlags,
const String16& opPackageName) {
if (mInitCheck != NO_ERROR)
return mInitCheck;
sp<SensorInterface> sensor = getSensorInterfaceFromHandle(handle);
.....
if (err == NO_ERROR) {
ALOGD_IF(DEBUG_CONNECTIONS, "Calling activate on %d", handle);
err = sensor->activate(connection.get(), true);
}
......
return err;
}
sensor是之前在onFirstRef中添加的 HardwareSensor对象,其继承自SensorInterface类。avtivate方法是调用了SensorDevice的activate方法。
/frameworks/native/services/sensorservice/SensorInterface.cpp
status_t HardwareSensor::activate(void* ident, bool enabled) {
return mSensorDevice.activate(ident, mSensor.getHandle(), enabled);
}
在SensorDevice中,调用到了mSensors的activate方法,传入了handle值来表明要打开哪个sensor。
status_t SensorDevice::activate(void* ident, int handle, int enabled) {
if (mSensors == nullptr) return NO_INIT;
Mutex::Autolock _l(mLock);
return activateLocked(ident, handle, enabled);
}
status_t SensorDevice::activateLocked(void* ident, int handle, int enabled) {
......
if (activateHardware) {
err = doActivateHardwareLocked(handle, enabled);
......
return err;
}
status_t SensorDevice::doActivateHardwareLocked(int handle, bool enabled) {
ALOGD_IF(DEBUG_CONNECTIONS, "\t>>> actuating h/w activate handle=%d enabled=%d", handle,
enabled);
status_t err = checkReturnAndGetStatus(mSensors->activate(handle, enabled));
ALOGE_IF(err, "Error %s sensor %d (%s)", enabled ? "activating" : "disabling", handle,
strerror(-err));
return err;
}
mSensors是在连接hidl服务的时候创建的一个ISensorsWrapperV2_1对象,在构造该对象时,将sensor的hidl服务作为参数传入。
SensorDevice::HalConnectionStatus SensorDevice::connectHidlServiceV2_1() {
HalConnectionStatus connectionStatus = HalConnectionStatus::UNKNOWN;
sp<V2_1::ISensors> sensors = V2_1::ISensors::getService();
if (sensors == nullptr) {
connectionStatus = HalConnectionStatus::DOES_NOT_EXIST;
} else {
mSensors = new ISensorsWrapperV2_1(sensors);
connectionStatus = initializeHidlServiceV2_X();
}
return connectionStatus;
}
ISensorsWrapperV2_1继承自SensorsWrapperBase,SensorsWrapperBase的activate方法又调用内部mSensors对象的activate方法,这样就调用到了2.1的sensor hidl服务的activate方法。
/hardware/interfaces/sensors/common/utils/ISensorsWrapper.h
Return<Result> activate(int32_t sensorHandle, bool enabled) override {
return mSensors->activate(sensorHandle, enabled);
}
于是从系统的systemserver来到了hidl服务这里。眼镜使用的是[email protected],在service.cpp中将halProxy注册到系统。
/hardware/interfaces/sensors/2.1/multihal/service.cpp
int main(int /* argc */, char** /* argv */) {
......
android::sp<ISensors> halProxy = new HalProxyV2_1();
if (halProxy->registerAsService() != ::android::OK) {
ALOGE("Failed to register Sensors HAL instance");
return -1;
}
joinRpcThreadpool();
return 1; // joinRpcThreadpool shouldn't exit
}
我们再回到activate上来,调用hidl服务的activate既是调用了HalProxy的activate方法。
Return<Result> HalProxy::activate(int32_t sensorHandle, bool enabled) {
if (!isSubHalIndexValid(sensorHandle)) {
return Result::BAD_VALUE;
}
return getSubHalForSensorHandle(sensorHandle)
->activate(clearSubHalIndex(sensorHandle), enabled);
}
这里根据传入的sensorHandle的值找到了对应的ISubHalWrapperBase的对象。这个ISubHalWrapperBase对象其实是之前push_back到mSubHalList中的SubHalWrapperV2_1。
class SubHalWrapperV2_1 : public SubHalWrapperBase<V2_1::implementation::ISensorsSubHal> {
......
};
Return<Result> activate(int32_t sensorHandle, bool enabled) override {
return mSubHal->activate(sensorHandle, enabled);
}
SubHalWrapperV2_1的activate方法调用了mSubHal的activate方法,根据前面的介绍,这个mSubHal即高通sensors.ssc.so中实现的ISensorsSubHal*。之后会在高通的sensor hal总继续完成调用。
三、Sensor接收数据流程(Hidl层)

systemServer进程中创建了快速消息队列以及eventQueue,通过hidl通信将eventQueue的Desc传递给了hidl服务。sensor的hidl服务中通过该Desc还原出对应的eventQueue。
Return<Result> HalProxy::initialize_2_1(
const ::android::hardware::MQDescriptorSync<V2_1::Event>& eventQueueDescriptor,
const ::android::hardware::MQDescriptorSync<uint32_t>& wakeLockDescriptor,
const sp<V2_1::ISensorsCallback>& sensorsCallback) {
sp<ISensorsCallbackWrapperBase> dynamicCallback =
new ISensorsCallbackWrapperV2_1(sensorsCallback);
// Create the Event FMQ from the eventQueueDescriptor. Reset the read/write positions.auto eventQueue =
std::make_unique<EventMessageQueueV2_1>(eventQueueDescriptor, true /* resetPointers */);
std::unique_ptr<EventMessageQueueWrapperBase> queue =
std::make_unique<EventMessageQueueWrapperV2_1>(eventQueue);
return initializeCommon(queue, wakeLockDescriptor, dynamicCallback);
在initializeCommon方法中,将mEventQueue进行赋值
Return<Result> HalProxy::initializeCommon(
std::unique_ptr<EventMessageQueueWrapperBase>& eventQueue,
const ::android::hardware::MQDescriptorSync<uint32_t>& wakeLockDescriptor,
const sp<ISensorsCallbackWrapperBase>& sensorsCallback) {
......
// Create the Event FMQ from the eventQueueDescriptor. Reset the read/write positions.
mEventQueue = std::move(eventQueue);
在HalProxy的postEventsToMessageQueue方法里,调用了mEventQueue的write方法。
这里实际上是使用跨进程的FMQ快速消息队列来及逆行数据的发送,底层的原理是共享内存。这里hidl进程的FMQ服务端进行数据的发送。而systemServer进程中的FMQ客户端进行数据的接收。
/hardware/interfaces/sensors/common/default/2.X/multihal/HalProxy.cpp
void HalProxy::postEventsToMessageQueue(const std::vector<Event>& events, size_t numWakeupEvents,
V2_0::implementation::ScopedWakelock wakelock) {
......
if (mEventQueue->write(events.data(), numToWrite)) {
// TODO(b/143302327): While loop if mEventQueue->avaiableToWrite > 0 to possibly fit// in more writes immediately
//写数据之后调用wake通知读端进行数据的读取
mEventQueueFlag->wake(static_cast<uint32_t>(EventQueueFlagBits::READ_AND_PROCESS));
} else {
numToWrite = 0;
}
}
}
......
}
在SensorDevice中的pollFmq中,通过getEventQueue()来获得EventMessageQueueWrapperV2_1对象(该对象不是hidl进程中的那个EventMessageQueueWrapperV2_1),并调用其的read方法,通过这种方式,将sensor的数据写入了mEventBuffer。
之后便回到Sensor的framework层的方法中回调上去,这个可以看之前sensor系统服务的分析。
/frameworks/native/services/sensorservice/SensorDevice.cpp
ssize_t SensorDevice::pollFmq(sensors_event_t* buffer, size_t maxNumEventsToRead) { ssize_t eventsRead = 0;
......
if (eventsToRead > 0) {
if (mSensors->getEventQueue()->read(mEventBuffer.data(), eventsToRead)) {
// Notify the Sensors HAL that sensor events have been read. This is required to support// the use of writeBlocking by the Sensors HAL.mEventQueueFlag->wake(asBaseType(EventQueueFlagBits::EVENTS_READ));
......
return eventsRead;
}