合泰HT32F52352红外NEC编码
红外遥控协议类型:①NEC编码②RC5③RC6
NEC编码格式:①引导码②地址码③地址反码④控制码⑤控制码反码

图1.NEC编码时序图
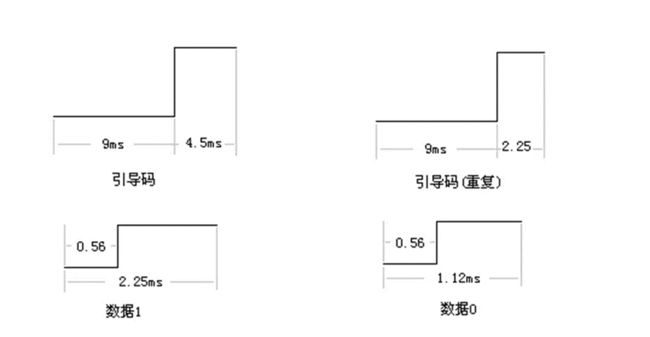
图2.引导码及数据定义
逻辑1:560us低1680us高 逻辑0:560us低 560us高
一个完整的周期为108ms,当我们一直按住 同一个按键的时候,就会隔一段时间发一个引导码(重复)。
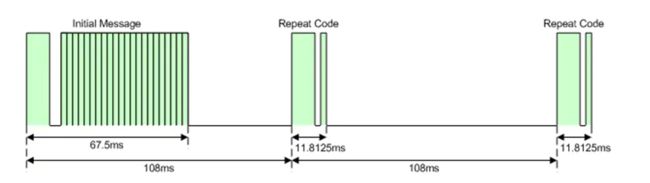
图三.Repeat波形图
#include "ht32.h"
#include "usart.h"
#include "Delay.h"
#include "led.h"
#include "key.h"
#include "stdio.h"
#include "lcd.h"
#include "gui.h"
#include "test.h"
#include "Initerface.h"
#include "rtc.h"
#include "time.h"
#include "ht32_board_config.h"
#define BreatheMax 600 //定时器呼吸灯
uint8_t data[7] = {0};
uint16_t count = 0; //计时
uint8_t puff[4] = {0};
u8 sum = 0;
u32 succeed = 0;
u32 fail = 0;
u32 key_sum = 0;
u32 rx_data = 0;
typedef struct
{
u32 OverflowCounter;
u32 StartValue;
u32 CapturePulse;
TM_CHP_Enum ChannelPolarity;
bool DataValid;
bool DataOverwrite;
} sPulseCaptureStructure;
void Capture_Configuration(void);
void Capture_MainRoutine(void);
void Capture_IRQHandler(void);
void Capture_Process(sPulseCaptureStructure* cap, u16 capture_value, bool isCapBeforeUpdate);
void PWM_OUT_Configuration(void);
sPulseCaptureStructure CaptureCHx;
void Timer_Init(void)
{
CKCU_PeripClockConfig_TypeDef CKCUClock= {{0}};
CKCUClock.Bit.BFTM0 = 1; //开启中断时钟
CKCU_PeripClockConfig(CKCUClock, ENABLE);
NVIC_EnableIRQ(BFTM0_IRQn);
BFTM_SetCounter(HT_BFTM0, 0);
//BFTM_SetCompare(HT_BFTM1, SystemCoreClock);//定时1s产生中断
BFTM_SetCompare(HT_BFTM0, SystemCoreClock/1000);//定时1ms产生中断 呼吸灯1us中断1000000
BFTM_IntConfig(HT_BFTM0, ENABLE);//使能中断
BFTM_EnaCmd(HT_BFTM0, ENABLE);//使能BFTM
}
void BFTM0_IRQHandler(void)
{
if(BFTM_GetFlagStatus(HT_BFTM0) != RESET )
{
count++;
if(count == 500) //
{
count = 0;
}
//Capture_MainRoutine();
BFTM_ClearFlag(HT_BFTM0);//清除中断标志
}
}
void Capture_MainRoutine(void)
{
u32 Dval = 0;
u32 data = 9;
if (CaptureCHx.DataValid)
{
Dval = CaptureCHx.CapturePulse / (SystemCoreClock / 1000000ul);
//printf("Capture: %d %8.2f uS\r\n", CaptureCHx.CapturePulse, ((float)CaptureCHx.CapturePulse / (SystemCoreClock / 1000000ul)));
if(Dval>4200 && Dval<4700)
{
data = 3;
}
if(Dval>300 && Dval<800)
{
data = 0;
rx_data <<= 1;
rx_data |= 0;
sum++;
}
if(Dval>1400 && Dval<1800)
{
data = 1;
rx_data <<= 1;
rx_data |= 1;
sum++;
}
if(sum >= 32)
{
rx_data >>= 8;
rx_data &= 0x00FF;
key_sum++;
switch (rx_data)
{
case 0xA2:succeed++;printf("%d:%d + %d = %d%% RX:CH-\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x62:succeed++;printf("%d:%d + %d = %d%% RX:CH\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0xE2:succeed++;printf("%d:%d + %d = %d%% RX:CH+\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x22:succeed++;printf("%d:%d + %d = %d%% RX:|<<\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x02:succeed++;printf("%d:%d + %d = %d%% RX:>>|\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0xC2:succeed++;printf("%d:%d + %d = %d%% RX:>||\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0xE0:succeed++;printf("%d:%d + %d = %d%% RX:-\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0xA8:succeed++;printf("%d:%d + %d = %d%% RX:+\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x90:succeed++;printf("%d:%d + %d = %d%% RX:EQ\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x68:succeed++;printf("%d:%d + %d = %d%% RX:0\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x98:succeed++;printf("%d:%d + %d = %d%% RX:100+\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0xB0:succeed++;printf("%d:%d + %d = %d%% RX:200+\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x30:succeed++;printf("%d:%d + %d = %d%% RX:1\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x18:succeed++;printf("%d:%d + %d = %d%% RX:2\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x7A:succeed++;printf("%d:%d + %d = %d%% RX:3\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x10:succeed++;printf("%d:%d + %d = %d%% RX:4\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x38:succeed++;printf("%d:%d + %d = %d%% RX:5\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x5A:succeed++;printf("%d:%d + %d = %d%% RX:6\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x42:succeed++;printf("%d:%d + %d = %d%% RX:7\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x4A:succeed++;printf("%d:%d + %d = %d%% RX:8\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
case 0x52:succeed++;printf("%d:%d + %d = %d%% RX:9\r\n",key_sum,succeed,fail,(succeed*100)/key_sum);break;
default:fail++;printf("%d:%d + %d = %d%% RX:%X Error! Please reset the reboot!\r\n",key_sum,succeed,fail,(succeed*100)/key_sum,rx_data);break;
}
rx_data = 0;
sum = 0;
}
CaptureCHx.DataValid = FALSE;
}
}
/*********************************************************************************************************//**
* @brief Configures TM to capture waveform.
* @retval None
***********************************************************************************************************/
void Capture_Configuration(void)
{
{ /* Enable peripheral clock */
CKCU_PeripClockConfig_TypeDef CKCUClock = {{ 0 }};
CKCUClock.Bit.AFIO = 1;
CKCUClock.Bit.HTCFG_CAP_IPN = 1;
CKCU_PeripClockConfig(CKCUClock, ENABLE);
}
/* Configure AFIO mode as TM function */
AFIO_GPxConfig(HTCFG_CAP_GPIO_ID, HTCFG_CAP_AFIO_PIN, AFIO_FUN_MCTM_GPTM);
{ /* Time base configuration */
/* !!! NOTICE !!!
Notice that the local variable (structure) did not have an initial value.
Please confirm that there are no missing members in the parameter settings below in this function.
*/
TM_TimeBaseInitTypeDef TimeBaseInit;
TimeBaseInit.Prescaler = 1 - 1; // Timer clock = CK_AHB / 1
TimeBaseInit.CounterReload = 0xFFFF;
TimeBaseInit.RepetitionCounter = 0;
TimeBaseInit.CounterMode = TM_CNT_MODE_UP;
TimeBaseInit.PSCReloadTime = TM_PSC_RLD_IMMEDIATE;
TM_TimeBaseInit(HTCFG_CAP_PORT, &TimeBaseInit);
/* Clear Update Event Interrupt flag since the "TM_TimeBaseInit()" writes the UEV1G bit */
TM_ClearFlag(HTCFG_CAP_PORT, TM_FLAG_UEV);
}
{ /* Channel n capture configuration */
/* !!! NOTICE !!!
Notice that the local variable (structure) did not have an initial value.
Please confirm that there are no missing members in the parameter settings below in this function.
*/
TM_CaptureInitTypeDef CapInit;
TM_CaptureStructInit(&CapInit);
CapInit.Channel = HTCFG_CAP_CH;
CapInit.Polarity = TM_CHP_NONINVERTED;
CapInit.Selection = TM_CHCCS_DIRECT;
CapInit.Prescaler = TM_CHPSC_OFF;
#if (LIBCFG_TM_652XX_V1)
CapInit.Fsampling = TM_CHFDIV_1;
CapInit.Event = TM_CHFEV_OFF;
#else
CapInit.Filter = 0x0;
#endif
TM_CaptureInit(HTCFG_CAP_PORT, &CapInit);
}
/* Enable TM Channel Capture and Update Event interrupts */
TM_IntConfig(HTCFG_CAP_PORT, HTCFG_CAP_CCR | TM_INT_UEV, ENABLE);
NVIC_EnableIRQ(HTCFG_CAP_IRQn);
TM_Cmd(HTCFG_CAP_PORT, ENABLE);
}
/*********************************************************************************************************//**
* @brief This function handles GPTM interrupt.
* @retval None
***********************************************************************************************************/
void HTCFG_CAP_IRQHandler(void)
{
bool update_flag = FALSE;
/* store and clear all interrupt flags */
u32 status = HTCFG_CAP_PORT->INTSR;
u32 cnt = HTCFG_CAP_PORT->CNTR;
#if 0
if ((status & TM_INT_UEV) != (HTCFG_CAP_PORT->INTSR & TM_INT_UEV))
{
status = HTCFG_CAP_PORT->INTSR;
cnt = HTCFG_CAP_PORT->CNTR;
}
#endif
HTCFG_CAP_PORT->INTSR = ~status;
if (status & TM_INT_UEV)
{
update_flag = TRUE;
/* The OverflowCounter will stop at max value 0xFFFF */
if (CaptureCHx.OverflowCounter != 0xFFFF)
CaptureCHx.OverflowCounter++;
}
if (status & HTCFG_CAP_CCR)
{
u32 cap_value = TM_GetCaptureCompare(HTCFG_CAP_PORT, HTCFG_CAP_CH);
bool isCapBeforeUpdate = (update_flag && (cap_value > cnt))? TRUE : FALSE;
Capture_Process(&CaptureCHx, cap_value, isCapBeforeUpdate);
TM_ChPolarityConfig(HTCFG_CAP_PORT, HTCFG_CAP_CH, CaptureCHx.ChannelPolarity);
}
}
/*********************************************************************************************************//**
* @brief Capture Process function.
* @retval None
************************************************************************************************************/
void Capture_Process(sPulseCaptureStructure* cap, u16 capture_value, bool isCapBeforeUpdate)
{
if (cap->ChannelPolarity == TM_CHP_NONINVERTED)
{
/* Reset OverflowCounter and store capture value when rising edge occurred */
if (isCapBeforeUpdate)
{
cap->OverflowCounter = 1;
}
else
{
cap->OverflowCounter = 0;
}
cap->StartValue = capture_value;
/* Change channel polarity to capture when falling edge occur */
cap->ChannelPolarity = TM_CHP_INVERTED;
}
else
{
/* Compute pulse width in PCLK unit when falling edge occurred */
if (isCapBeforeUpdate)
cap->OverflowCounter--;
cap->CapturePulse = (cap->OverflowCounter << 16) - cap->StartValue + capture_value + 1;
if (cap->DataValid)
cap->DataOverwrite = TRUE;
else
cap->DataValid = TRUE;
/* Change channel polarity to capture when rising edge occur */
cap->ChannelPolarity = TM_CHP_NONINVERTED;
}
}
/*********************************************************************************************************//**
* @brief Configures TM to output PWM waveform.
* @retval None
* @details Configuration as frequency 1 Hz and duty 2500 uS (10/4000).
***********************************************************************************************************/
void PWM_OUT_Configuration(void)
{
{ /* Enable peripheral clock */
CKCU_PeripClockConfig_TypeDef CKCUClock = {{ 0 }};
CKCUClock.Bit.AFIO = 1;
CKCUClock.Bit.HTCFG_PWM_IPN = 1;
CKCU_PeripClockConfig(CKCUClock, ENABLE);
}
/* Configure AFIO mode as TM function */
AFIO_GPxConfig(HTCFG_PWM_GPIO_ID, HTCFG_PWM_AFIO_PIN, HTCFG_PWM_AFIO_FUN);
{ /* Time base configuration */
/* !!! NOTICE !!!
Notice that the local variable (structure) did not have an initial value.
Please confirm that there are no missing members in the parameter settings below in this function.
*/
TM_TimeBaseInitTypeDef TimeBaseInit;
TimeBaseInit.Prescaler = (SystemCoreClock / 4000) - 1; // Timer clock = 4 kHz
TimeBaseInit.CounterReload = 4000 - 1; // PWM frequency = 1 Hz
TimeBaseInit.RepetitionCounter = 0;
TimeBaseInit.CounterMode = TM_CNT_MODE_UP;
TimeBaseInit.PSCReloadTime = TM_PSC_RLD_IMMEDIATE;
TM_TimeBaseInit(HTCFG_PWM_PORT, &TimeBaseInit);
/* Clear Update Event Interrupt flag since the "TM_TimeBaseInit()" writes the UEV1G bit */
#if 0
TM_ClearFlag(HTCFG_PWM_PORT, TM_FLAG_UEV);
#endif
}
{ /* Channel n output configuration */
/* !!! NOTICE !!!
Notice that the local variable (structure) did not have an initial value.
Please confirm that there are no missing members in the parameter settings below in this function.
*/
TM_OutputInitTypeDef OutInit;
OutInit.Channel = HTCFG_PWM_CH;
OutInit.OutputMode = TM_OM_PWM2;
OutInit.Control = TM_CHCTL_ENABLE;
OutInit.ControlN = TM_CHCTL_DISABLE;
OutInit.Polarity = TM_CHP_NONINVERTED;
OutInit.PolarityN = TM_CHP_NONINVERTED;
OutInit.IdleState = MCTM_OIS_LOW;
OutInit.IdleStateN = MCTM_OIS_HIGH;
OutInit.Compare = 4000 - 10; // PWM duty = 10/4000 = 2500 us
OutInit.AsymmetricCompare = 0;
TM_OutputInit(HTCFG_PWM_PORT, &OutInit);
}
TM_Cmd(HTCFG_PWM_PORT, ENABLE);
}
#ifndef __TIME_H
#define __TIME_H
void Timer_Init(void);
void Led_chang(void);
void show_time(void);
void Capture_Configuration(void);
void Capture_MainRoutine(void);
void Capture_IRQHandler(void);
void PWM_OUT_Configuration(void);
#endif
#include "ht32.h"
#include "usart.h"
#include "Delay.h"
#include "led.h"
#include "key.h"
#include "stdio.h"
#include "lcd.h"
#include "gui.h"
#include "test.h"
#include "Initerface.h"
#include "rtc.h"
#include "time.h"
#include "ht32_board_config.h"
uint8_t urtrx_data[7];
void delay(u32 nCount)
{
vu32 i;
for (i = 0; i < 10000 * nCount; i++){}
}
int main(void)
{
USART_Configuration();
LED_Init();
Timer_Init();
RETARGET_Configuration();
Capture_Configuration();
PWM_OUT_Configuration();
Led_on();
printf("START!\r\n");
while(1)
{
Capture_MainRoutine();
}
}
/*********************************************************************************************************//**
* @file GPIO/InputOutput/ht32_board_config.h
* @version $Rev:: 4728 $
* @date $Date:: 2020-04-07#$
* @brief The header file of board configuration.
*************************************************************************************************************
* @attention
*
* Firmware Disclaimer Information
*
* 1. The customer hereby acknowledges and agrees that the program technical documentation, including the
* code, which is supplied by Holtek Semiconductor Inc., (hereinafter referred to as "HOLTEK") is the
* proprietary and confidential intellectual property of HOLTEK, and is protected by copyright law and
* other intellectual property laws.
*
* 2. The customer hereby acknowledges and agrees that the program technical documentation, including the
* code, is confidential information belonging to HOLTEK, and must not be disclosed to any third parties
* other than HOLTEK and the customer.
*
* 3. The program technical documentation, including the code, is provided "as is" and for customer reference
* only. After delivery by HOLTEK, the customer shall use the program technical documentation, including
* the code, at their own risk. HOLTEK disclaims any expressed, implied or statutory warranties, including
* the warranties of merchantability, satisfactory quality and fitness for a particular purpose.
*
* Copyright (C) Holtek Semiconductor Inc. All rights reserved
************************************************************************************************************/
/* Define to prevent recursive inclusion -------------------------------------------------------------------*/
#ifndef __HT32_BOARD_CONFIG_H
#define __HT32_BOARD_CONFIG_H
#ifdef __cplusplus
extern "C" {
#endif
/* Settings ------------------------------------------------------------------------------------------------*/
#if defined(USE_HT32F52352_SK)
#define HTCFG_OUTPUT_LED0_ID (GPIO_PC)
#define HTCFG_OUTPUT_LED1_ID (GPIO_PC)
#define HTCFG_OUTPUT_LED2_ID (GPIO_PC)
#define HTCFG_INPUT_WAKE_ID (GPIO_PB)
#define HTCFG_INPUT_KEY1_ID (GPIO_PD)
#define HTCFG_INPUT_KEY2_ID (GPIO_PD)
#define HTCFG_OUTPUT_LED0_CLK(CK) (CK.Bit.PC)
#define HTCFG_OUTPUT_LED1_CLK(CK) (CK.Bit.PC)
#define HTCFG_OUTPUT_LED2_CLK(CK) (CK.Bit.PC)
#define HTCFG_INPUT_WAKE_CLK(CK) (CK.Bit.PB)
#define HTCFG_INPUT_KEY1_CLK(CK) (CK.Bit.PD)
#define HTCFG_INPUT_KEY2_CLK(CK) (CK.Bit.PD)
#define HTCFG_LED0 (HT_GPIOC)
#define HTCFG_LED1 (HT_GPIOC)
#define HTCFG_LED2 (HT_GPIOC)
#define HTCFG_WAKE (HT_GPIOB)
#define HTCFG_KEY1 (HT_GPIOD)
#define HTCFG_KEY2 (HT_GPIOD)
#define HTCFG_OUTPUT_LED0_AFIO_PIN (AFIO_PIN_14)
#define HTCFG_OUTPUT_LED1_AFIO_PIN (AFIO_PIN_15)
#define HTCFG_OUTPUT_LED2_AFIO_PIN (AFIO_PIN_1)
#define HTCFG_INPUT_WAKE_AFIO_PIN (AFIO_PIN_12)
#define HTCFG_INPUT_KEY1_AFIO_PIN (AFIO_PIN_1)
#define HTCFG_INPUT_KEY2_AFIO_PIN (AFIO_PIN_2)
#define HTCFG_OUTPUT_LED0_GPIO_PIN (GPIO_PIN_14)
#define HTCFG_OUTPUT_LED1_GPIO_PIN (GPIO_PIN_15)
#define HTCFG_OUTPUT_LED2_GPIO_PIN (GPIO_PIN_1)
#define HTCFG_INPUT_WAKE_GPIO_PIN (GPIO_PIN_12)
#define HTCFG_INPUT_KEY1_GPIO_PIN (GPIO_PIN_1)
#define HTCFG_INPUT_KEY2_GPIO_PIN (GPIO_PIN_2)
#endif
/* Settings ------------------------------------------------------------------------------------------------*/
#if defined(USE_HT32F52230_SK)
#error "This example code does not apply to the chip you selected."
#endif
#if defined(USE_HT32F52352_SK)
#define HTCFG_SPI_MASTER_SEL_GPIO_ID (HT_GPIOB)
#define HTCFG_SPI_MASTER_SEL_CLOCK(CK) (CK.Bit.PB)
#define HTCFG_SPI_MASTER_CLOCK(CK) (CK.Bit.SPI0)
#define HTCFG_SPI_MASTER (HT_SPI0)
#define HTCFG_SPI_MASTER_IRQn (SPI0_IRQn)
#define HTCFG_SPI_MASTER_SEL_AFIO_PORT (GPIO_PB)
#define HTCFG_SPI_MASTER_SCK_AFIO_PORT (GPIO_PB)
#define HTCFG_SPI_MASTER_MOSI_AFIO_PORT (GPIO_PB)
#define HTCFG_SPI_MASTER_MISO_AFIO_PORT (GPIO_PB)
#define HTCFG_SPI_MASTER_SEL_AFIO_PIN (AFIO_PIN_2)
#define HTCFG_SPI_MASTER_SCK_AFIO_PIN (AFIO_PIN_3)
#define HTCFG_SPI_MASTER_MOSI_AFIO_PIN (AFIO_PIN_4)
#define HTCFG_SPI_MASTER_MISO_AFIO_PIN (AFIO_PIN_5)
#define HTCFG_SPI_MASTER_IRQHandler (SPI0_IRQHandler)
#define HTCFG_SPI_SLAVE_CLOCK(CK) (CK.Bit.SPI1)
#define HTCFG_SPI_SLAVE (HT_SPI1)
#define HTCFG_SPI_SLAVE_IRQn (SPI1_IRQn)
#define HTCFG_SPI_SLAVE_SEL_AFIO_PORT (GPIO_PA)
#define HTCFG_SPI_SLAVE_SCK_AFIO_PORT (GPIO_PC)
#define HTCFG_SPI_SLAVE_MOSI_AFIO_PORT (GPIO_PC)
#define HTCFG_SPI_SLAVE_MISO_AFIO_PORT (GPIO_PC)
#define HTCFG_SPI_SLAVE_SEL_AFIO_PIN (AFIO_PIN_4)
#define HTCFG_SPI_SLAVE_SCK_AFIO_PIN (AFIO_PIN_5)
#define HTCFG_SPI_SLAVE_MOSI_AFIO_PIN (AFIO_PIN_8)
#define HTCFG_SPI_SLAVE_MISO_AFIO_PIN (AFIO_PIN_9)
#define HTCFG_SPI_SLAVE_IRQHandler (SPI1_IRQHandler)
#endif
#if defined(USE_HT32F52352_SK)
#define _HTCFG_UART_TX_GPIOX A
#define _HTCFG_UART_TX_GPION 4
#define _HTCFG_UART_RX_GPIOX A
#define _HTCFG_UART_RX_GPION 5
#define HTCFG_UART_IPN USART1
#define HTCFG_TX_PDMA_CH (PDMA_USART1_TX)
#define HTCFG_RX_PDMA_CH (PDMA_USART1_RX)
#define HTCFG_PDMA_IRQ (PDMACH2_5_IRQn)
#define HTCFG_PDMA_IRQHandler (PDMA_CH2_5_IRQHandler)
#define HTCFG_PDMA_CURRENT_TRANSFER_SIZE (HT_PDMA->PDMACH2.CTSR >> 16)
#endif
#define HTCFG_CAP_GPIO_ID STRCAT2(GPIO_P, _HTCFG_CAP_GPIOX)
#define HTCFG_CAP_AFIO_PIN STRCAT2(AFIO_PIN_, _HTCFG_CAP_GPION)
#define HTCFG_CAP_PORT STRCAT2(HT_, HTCFG_CAP_IPN)
#define HTCFG_CAP_CH STRCAT2(TM_CH_, _HTCFG_CAP_CHN)
#define HTCFG_UART_TX_GPIO_ID STRCAT2(GPIO_P, _HTCFG_UART_TX_GPIOX)
#define HTCFG_UART_RX_GPIO_ID STRCAT2(GPIO_P, _HTCFG_UART_RX_GPIOX)
#define HTCFG_UART_TX_AFIO_PIN STRCAT2(AFIO_PIN_, _HTCFG_UART_TX_GPION)
#define HTCFG_UART_RX_AFIO_PIN STRCAT2(AFIO_PIN_, _HTCFG_UART_RX_GPION)
#define HTCFG_UART_PORT STRCAT2(HT_, HTCFG_UART_IPN)
#define HTCFG_UART_IRQn STRCAT2(HTCFG_UART_IPN, _IRQn)
#define HTCFG_UART_IRQHandler STRCAT2(HTCFG_UART_IPN, _IRQHandler)
#define HTCFG_UART_RX_GPIO_CLK STRCAT2(P, _HTCFG_UART_RX_GPIOX)
#define HTCFG_UART_RX_GPIO_PORT STRCAT2(HT_GPIO, _HTCFG_UART_RX_GPIOX)
#define HTCFG_UART_RX_GPIO_PIN STRCAT2(GPIO_PIN_, _HTCFG_UART_RX_GPION)
#define _HTCFG_CAP_GPIOX C
#define _HTCFG_CAP_GPION 5
#define HTCFG_CAP_IPN GPTM0
#define _HTCFG_CAP_CHN 1
#define HTCFG_CAP_CCR (TM_INT_CH1CC)
#define _HTCFG_PWM_GPIOX B
#define _HTCFG_PWM_GPION 4
#define HTCFG_PWM_IPN SCTM0
#define _HTCFG_PWM_CHN 0
#if (LIBCFG_GPTM_GIRQ == 1)
#define HTCFG_CAP_IRQn STRCAT2(HTCFG_CAP_IPN, _G_IRQn)
#define HTCFG_CAP_IRQHandler STRCAT2(HTCFG_CAP_IPN, _G_IRQHandler)
#else
#define HTCFG_CAP_IRQn STRCAT2(HTCFG_CAP_IPN, _IRQn)
#define HTCFG_CAP_IRQHandler STRCAT2(HTCFG_CAP_IPN, _IRQHandler)
#endif
#define HTCFG_PWM_GPIO_ID STRCAT2(GPIO_P, _HTCFG_PWM_GPIOX)
#define HTCFG_PWM_AFIO_PIN STRCAT2(AFIO_PIN_, _HTCFG_PWM_GPION)
#define HTCFG_PWM_AFIO_FUN STRCAT2(AFIO_FUN_, HTCFG_PWM_IPN)
#define HTCFG_PWM_PORT STRCAT2(HT_, HTCFG_PWM_IPN)
#define HTCFG_PWM_CH STRCAT2(TM_CH_, _HTCFG_PWM_CHN)
#ifdef __cplusplus
}
#endif
#endif

图四.测试结果

图五.实物图