### Newton's Method
牛顿法可以用于求解方程,优化问题。牛顿法在最优化问题中每步都要求Hessian矩阵,计算比较复杂,拟牛顿法通过正定矩阵近似Hessian矩阵,简化了这一计算过程。
#@author: gr
#@date: 2014-01-30
#@email: [email protected]一、 Talyor公式
$f(x)$具有直到$(n+1)$阶的导数,有
$$ f(x) = f(x_0) + f'(x_0)(x - x_0) + \dfrac{f''(x_0)}{2!}(x - x_0)^2 + \cdots + \dfrac{f^n(x_0)}{n!}(x - x_0)^n + R_n(x)$$
其中,
$$R_n(x) = \dfrac{f^{(n+1)(\xi)}}{(n+1)!}(x - x_0)^{n+1}$$
二、Jacobian & Hessian
1. Jacobian矩阵
假设$F: R_n \rightarrow R_m$ 是一个从欧式n维空间转换到欧式m维空间的函数。这个函数由m个实函数组成:$y_1(x_1,\cdots , x_n), \cdots , y_m(x_1, \cdots , x_n)$。则Jacobian矩阵如下:
$$ J = \begin{bmatrix} \dfrac{\partial y_1}{\partial x_1} & \dfrac{\partial y_1}{\partial x_2} & \cdots & \dfrac{\partial y_1}{\partial x_n} \\ \dfrac{\partial y_2}{\partial x_1} & \dfrac{\partial y_2}{\partial x_2} & \cdots & \dfrac{\partial y_2}{\partial x_n}\\ \vdots & \vdots & \ddots & \vdots & \\ \dfrac{\partial y_n}{\partial x_1} & \dfrac{\partial y_n}{\partial x_2} & \cdots & \dfrac{\partial y_n}{\partial x_n} \end{bmatrix} $$
如果$ m = n$时,那么F就变成了$n \times n$ 维的函数,它的雅可比矩阵是一个方阵。
2. Hessian矩阵
海森矩阵(Hessian matrix或Hessian)是一个自变量为向量的实值函数的二阶偏导数组成的方块矩阵,函数如下:
$$ f(x_1, x_2, \cdots , x_n)$$
如果$f$的所有二阶导数都存在,那么$f$的海森矩阵即:
$$ H(f){ij} (x) = Di D_j f(x) $$
其中$x = (x_1, x_2, \cdots , x_n)$,即$H(f)$为:
$$ \left[ \begin{matrix} \dfrac{\partial^2f}{\partial x_1^2} & \dfrac{\partial^2f}{\partial x_1 \partial x_2 } & \cdots & \dfrac{\partial^2f}{\partial x_1 \partial x_n }\\ \dfrac{\partial^2f}{\partial x_2 \partial x_1} & \dfrac{\partial^2f}{\partial x_2^2} & \cdots & \dfrac{\partial^2f}{\partial x_2 \partial x_n }\\ \vdots & \vdots & \ddots & \vdots \\ \dfrac{\partial^2f}{\partial x_n \partial x_1} & \dfrac{\partial^2f}{\partial x_n \partial x_2} & \cdots & \dfrac{\partial^2f}{\partial x_n^2 }\\ \end{matrix} \right] $$
海森矩阵可以被应用于牛顿法解决的大规模优化问题.
三、 求解方程 (Newton's Method)
有方程$f(x) = 0$,当求解这个方程很困难时可以使用牛顿法。
根据Talyor公式,有
$$f(x) \approx f(x_k) + (x - x_k) ~ f'(x_k)$$
令$f(x) = 0$,有
$$f(x_k) + (x - x_k) ~ f'(x_k) = 0$$
设这个方程的解为$x_{k+1}$,那么有
$$ x_{k+1} = x_k - \dfrac{f'(x_k)}{f(x_k)}$$
这里,$f(x_{k+1})$ 比 $f(x_k)$ 更接近0,这样通过不停地迭代,可以在 $f(x^*) = 0$ 时收敛。整个过程如下图:
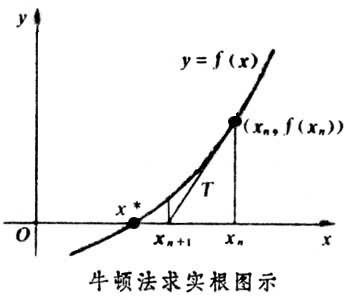
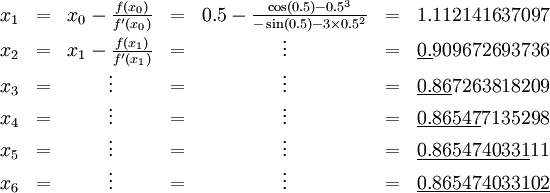
求解方程$f(x) = \cos(x)\cdot x^3$,从 $x_0 = 0.5$ 开始迭代,过程如下:
四、 优化问题 (Newton's Method)
很多优化问题都需要使用梯度下降法或牛顿法去求解。
根据Taylor公式,
$$f(x) = f(x_k + \Delta x) = f(x_k) + f'(x_k) \Delta x + \dfrac{1}{2}f''(x) \Delta x^2$$
当$\Delta x$趋近于0时,两边约去$f(x_k +\Delta x)$和$f(x_k)$, 有
$$f'(x_k) \Delta x + \dfrac{1}{2}f''(x) \Delta x^2 = 0$$
对$\Delta x$求导,进一步求解 $x$ 有
$$ x_{k+1} = x_k - \dfrac{f'(x)}{f''(x)}$$
上面讨论的是2维的情况,如何考虑高维的情况。
考虑无约束最优化问题
$$min_{x \in R^n} f(x)$$
假设在$x^*$处取到极小点。
将 $f(x)$ 在 $x_k$ 处进行二阶泰勒展开:
$$f(x) = f(x_k) + g_k^T(x - x_k) + \dfrac{1}{2}(x - x_k)^T H(x_k)(x - x_k) $$
其中,$g_k = g(x_k) = \nabla f(x_k)$ 是 $f(x)$ 的梯度向量在点 $x_k$ 的值,$H(x_k)$ 是 $f(x)$ 的Hessian矩阵。
$$H(x) = \left[
\begin{array}{c}
\dfrac{\partial^2f}{\partial x_i \partial x_j}
\end{array}
\right]_{n \times n}$$
有
$$x_{k+1} = x_k - H_k^{-1}g_k$$
五、 拟牛顿法
上面的方法求$H_k^{-1}$比较复杂,考虑用一个n阶矩阵$G_k$来近似替代它。
$$g_{k+1} - g_k = H_k(x_{k+1} - x_k)$$
记 $y_k = g_{k+1} - g_k$,$\delta_k = x_{k+1} - x_k$,则,
$$ y_k = H_k \delta_k$$
如果$H_k$是正定的,保证牛顿法搜索方向是下降方向。
$$x_{k+1} = x_k - \lambda H_k^{-1} g_k$$
$f(x)$ 在泰勒展开式可以近似写成:
$$f(x) = f(x_k) - \lambda g_k^TH_k^{-1}g_k$$
因为$H_k^{-1}$是正定的,故有 $g_k^T H_k^{-1} g_k > 0$。当$\lambda$为一个充分小的正数时,总有$f(x) < f(x_k)$,也就是说是下降方向。
拟牛顿法,将$G_k$作为$H_k^{-1}$的近似,要求矩阵$G_k$满足同样的条件。首先,$G_k$是正定的。同时,满足下面的拟牛顿条件:
$$G_{k+1} y_k = \delta_k$$
按照拟牛顿条件,在每次迭代中可以选择更新矩阵$G_{k+1}$:
$$G_{k+1} = G_k + \Delta G_k $$