POJ 1228 Grandpa's Estate --深入理解凸包
题意: 判断凸包是否稳定。
解法: 稳定凸包每条边上至少有三个点。
这题就在于求凸包的细节了,求凸包有两种算法:
1.基于水平序的Andrew算法
2.基于极角序的Graham算法
两种算法都有一个类似下面的语句:
for(int i=0;i<n;i++) {
while(m > 1 && Cross(ch[m-1]-ch[m-2], p[i]-ch[m-2]) <= 0) m--;
ch[m++] = p[i];
}
这样的话,求出来就是最简凸包,即点数尽量少的凸包,因为Cross == 0的情况也被出栈了,所以一条凸包边上就会三点共线了。
我们把语句改下,把Cross.. <=0 改成 Cross.. < 0 ,那么求的就是最繁凸包,即可能一条凸包边上包含很多点也属于凸包的点。
即下面的情况:
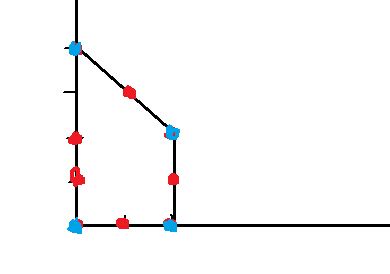
最简凸包即为蓝色的四个点。 最繁凸包求出的是所有蓝点和红点。
作为这个题,我们怎么求其实都可以:
1.如果求最简凸包,我们只需判断总共有多少个点在该凸包边上即可(端点也算),如果 < 3 ,则不符。
2.如果求的是最繁的凸包,就不能用上面的判法,因为怎么判都只有两个点了,这时候可以采用下面的方法:
假设要判断的边i,那么判断边i和边i-1,边i和边i+1的夹角是否都为0(180)。 ----XDruid
代码: (这里我用的是Andrew算法)


#include <iostream> #include <cstdio> #include <cstring> #include <cstdlib> #include <cmath> #include <algorithm>
#define eps 1e-8
using namespace std; struct Point{ double x,y; Point(double x=0, double y=0):x(x),y(y) {} void input() { scanf("%lf%lf",&x,&y); } }; typedef Point Vector; int dcmp(double x) { if(x < -eps) return -1; if(x > eps) return 1; return 0; } template <class T> T sqr(T x) { return x * x;} Vector operator + (Vector A, Vector B) { return Vector(A.x + B.x, A.y + B.y); } Vector operator - (Vector A, Vector B) { return Vector(A.x - B.x, A.y - B.y); } Vector operator * (Vector A, double p) { return Vector(A.x*p, A.y*p); } Vector operator / (Vector A, double p) { return Vector(A.x/p, A.y/p); } bool operator < (const Point& a, const Point& b) { return a.x < b.x || (a.x == b.x && a.y < b.y); } bool operator >= (const Point& a, const Point& b) { return a.x >= b.x && a.y >= b.y; } bool operator <= (const Point& a, const Point& b) { return a.x <= b.x && a.y <= b.y; } bool operator == (const Point& a, const Point& b) { return dcmp(a.x-b.x) == 0 && dcmp(a.y-b.y) == 0; } double Dot(Vector A, Vector B) { return A.x*B.x + A.y*B.y; } double Length(Vector A) { return sqrt(Dot(A, A)); } double Angle(Vector A, Vector B) { return acos(Dot(A, B) / Length(A) / Length(B)); } double Cross(Vector A, Vector B) { return A.x*B.y - A.y*B.x; } double angle(Vector v) { return atan2(v.y, v.x); } bool OnSegment(Point P, Point A, Point B) { //端点不算
return dcmp(Cross(A-P,B-P)) == 0 && dcmp(Dot(A-P,B-P)) <= 0; } int ConvexHull(Point* p, int n, Point* ch) { sort(p,p+n); int m = 0; for(int i=0;i<n;i++) { while(m > 1 && Cross(ch[m-1]-ch[m-2], p[i]-ch[m-2]) <= 0) m--; ch[m++] = p[i]; } int k = m; for(int i=n-2;i>=0;i--) { while(m > k && Cross(ch[m-1]-ch[m-2], p[i]-ch[m-2]) <= 0) m--; ch[m++] = p[i]; } if(n > 1) m--; return m; } Point ch[1006],p[1006]; int main() { int t,n,i,j; scanf("%d",&t); while(t--) { scanf("%d",&n); for(i=0;i<n;i++) p[i].input(); if(n <= 5) { puts("NO"); continue; } int m = ConvexHull(p,n,ch); if(m <= 2) { puts("NO"); continue; } for(i=0;i<m;i++) { int cnt = 0; for(j=0;j<n;j++) if(OnSegment(p[j],ch[i],ch[(i+1)%m])) cnt++; if(cnt < 3) break; } if(i == m) puts("YES"); else puts("NO"); } return 0; }
现在终于对自己的凸包版有了全面的了解了,妈妈再也不用担心我用错凸包了。哈哈。