W5300E01-ARM 交叉编译器(Cross Compiler)用户手册
W5300E01-ARM是基于W5300的ARM功能测试评估板:
1 简介
当用户的开发环境与目标系统不同时就会用到交叉编译器. 例如,当开发基于ARM的嵌入式系统时,用户就需要在电脑上写出源代码,并用交叉编译器进行编译。编译的二进制映像是在基于ARM的系统中运行,而不是在电脑中运行。
1.1 交叉编译器的构成
有几种常用的交叉编译器 –例如 ADS/RVCT (由ARM提供) 和GNU编译器。 W5300E01-ARM支持GNU编译器,GNU编译器是由以下部分组成。
- binutils
- 用来控制各种目标文件格式(.obj)的编程工具
2. gcc
- GNU 编译器
3. gibc
- 交叉编译器的程序库
1.2 安装准备
W5300E01-ARM的交叉编译器的版本是3.4.3,因此对于交叉编译器需要用3.4.x版本的GCC。 请检查你的电脑是否安装了3.4版本的GCC。
从下一章起,我们会逐步阐述交叉编译器的编译和安装的过程。请按本手册正确安装并且生成编译器。
2 源代码的下载
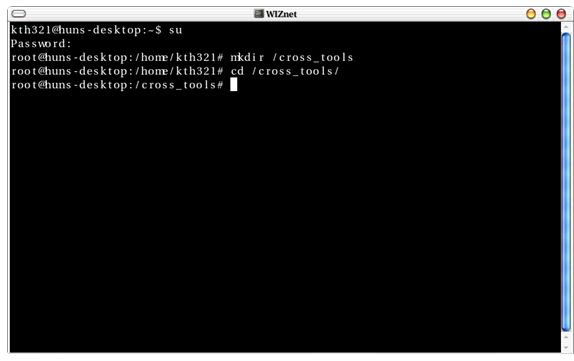
1. 由于系统组成原因,编译器的安装需要根(root)身份认证。在登陆进入root后,创建如下的目录:
- mkdir /cross_tools
- cd /cross_tools
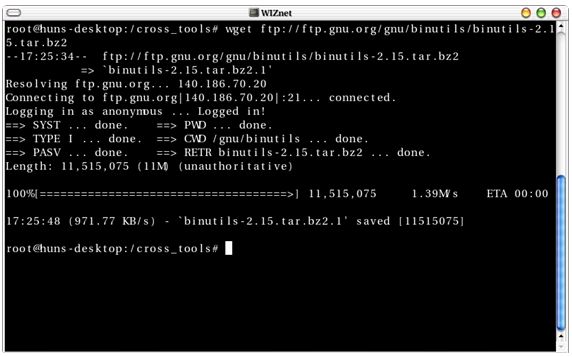
2. 下载 ‘binutils-2.15’ 源代码
XXQ
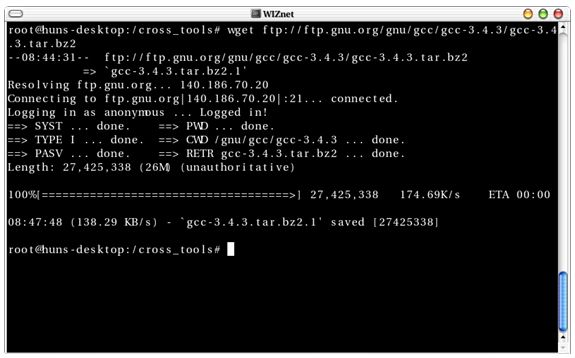
3. 下载 ‘gcc-3.4.3’ 源代码.
4. 下载 ‘glibc-2.3.3’ 源代码.
5. 下载 ‘glibc-linuxthreads-2.3.3’源代码。 ‘glibc’包括‘linuxthreads’程序库.
3. Linux 内核安装
为了使用Linux内核头文件,需要安装Linux内核。在开始安装之前,要安装 W5300E01-ARM提供的Linux核心代码,并生成 ‘linux/version.h’文件。
运行W5300E01-ARM包中的CD, 并且为W5300E01-ARM安装核心源代码. 如果CD-ROM是自动安装的,那么根据发行版本的不同,所显示的目录也不相同。
- mount /dev/cdrom /media/cdrom
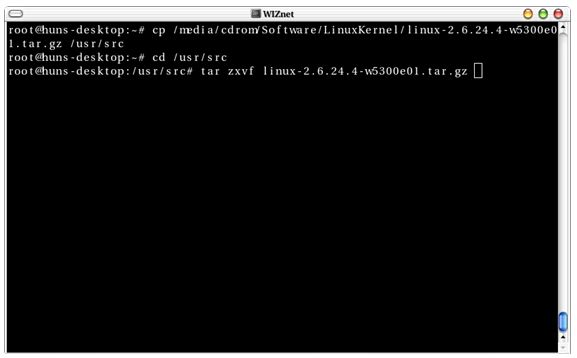
1. 复制核心源文件到 ‘/usr/src’ 目录下
- cp /media/cdrom/Softare/LinuxKernel/linux-2.6.24.4-w5300e01.tar.gz /usr/src/
2. 移动到 ‘/usr/src’ 目录下,解压Linux的核心源文件
- cd /usr/src
- tar zxvf linux-2.6.24.4-w5300e01.tar.gz
- cd linux-2.6.24.4-w5300e01
3. 为编译器和符号链接创建头文件
- make prepare
4. 进行符号链接可以简化目录名称,.
- cd ..
- ln –s linux-2.6.24.4-w5300e01 linux
4 ‘binutils’ 的安装
1. 到工作目录下,并解压‘binutils’文件
- cd /cross_tools/
- tar jxvf binutils-2.15.tar.bz2
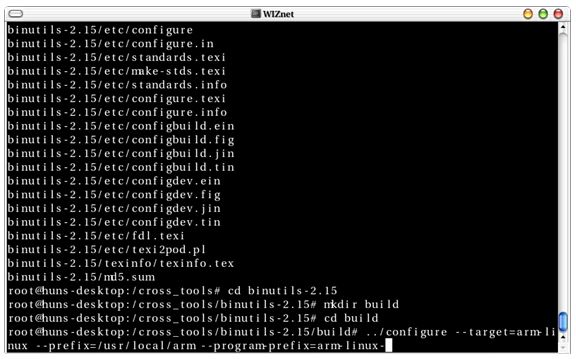
- cd binutils-2.15
2. 为 ‘binutils’ 的编译创建目录
- mkdir build
- cd build
3. 配置编译环境
为了避免覆盖已有的编译程序 指定‘/usr/local/arm’作为安装目录.
- ../configure –target=arm-linux –prefix=/usr/local/arm –program-prefix=arm-linux-
4. 编译和安装.
- make
- make install
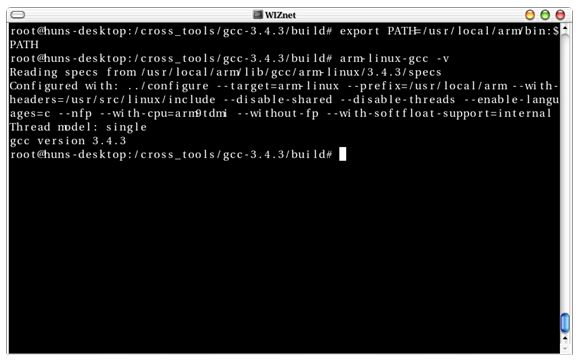
5. 导出目录的路径.
- export PATH=/usr/local/arm/bin:$PATH
5 ‘gcc’ 安装
安装 ‘gcc’ 来编译 ‘glibc’程序库和linux 内核。安装完 ‘glibc’之后,用于开发嵌入式软件的‘gcc’再次安装。
1. 移动到工作目录并解压‘gcc’压缩包
- cd /cross_tools/
- tar jxvf gcc-3.4.3.tar.bz2
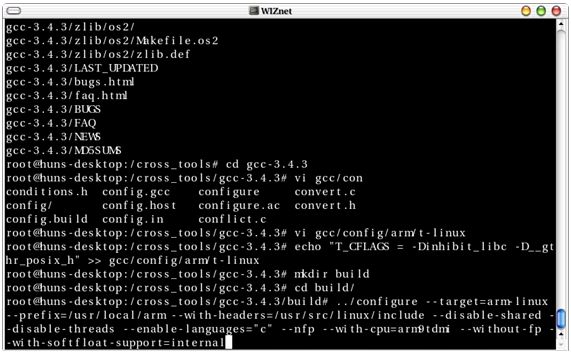
- cd gcc-3.4.3
2. 修改 ‘gcc/config/arm/t-linux’ 文件. (第3行)
- < 修改前 >
TARGET_LIBGCC2_CFLAGS = -fomit-frame-pointer -fPIC
- < 修改后 >
TARGET_LIBGCC2_CFLAGS = -fomit-frame-pointer –fPIC –Dinhibit_libc–D__gthr_posix_h
3. 在 ‘gcc/config/arm/t-linux’增加一些内容
- echo “T_CFLAGS = -Dinhibit_libc –D__gthr_posix_h” >> gcc/config/arm/t-linux
4. 为‘gcc’ 的编译创建一个目录.
- mkdir build
- cd build
5. 配置环境,以便编译
- ../configure --target=arm-linux --prefix=/usr/local/arm \
--with-headers=/usr/src/linux/include --disable-shared --disable-threads \
--enable-languages="c" –nfp --with-cpu=arm9tdmi --without-fp \
--with-softfloat-support=internal
6. 编译和安装.
- make
- make install
7. 检查版本.
- arm-linux-gcc –v
6 ‘glibc’ 安装
1. 移动到工作目录并解压 ‘glibc’压缩包
- cd /cross_tools/
- tar jxvf glibc-2.3.3.tar.bz2
2. 在 ‘glibc’ 目录下解压‘linuxhreads’
- tar –C glibc-2.3.3 –jxvf glibc-linuxthreads-2.3.3.tar.bz2
- cd glibc-2.3.3
3. 修改‘Makeconfig’ 文件. (第514行)
- 修改前
gnulib := -lgcc –lgcc_eh
- 修改后
gnulib := -lgcc
4. 修改‘csu/Makefile’文件(第107行)
- 修改前
CFLAGS-initfini.s = -g0 –fPIC –fno-inline-functions
- 修改后
CFLAGS-initfini.s = -O1 –g0 –fPIC –fno-inline-functions
5. 修改‘linuxthreads/Makefile’ 文件(第104行)
- 修改前
CFLAGS-pt-initfini.s = -g0 –fPIC –fno-inline-functions
- 修改后
CFLAGS-pt-initfini.s = -O1 –g0 –fPIC –fno-inline-functions
6. 修改‘sysdeps/generic/framestate.c’文件. (第44行)
- 修改前
frame_state_for = fallback_frame_state_for;
- 修改后
#ifndef __USING_SJLJ_EXCEPTIONS__
frame_state_for = fallback_frame_state_for;
#else
frame_state_for = abort;
#endif
7. 修改‘sysdeps/arm/machine-gmon.h’文件. (第 35 ~ 38行)
- 修改前
static void mcount_internal (u_long frompc, u_long selfpc);
#define _MCOUNT_DECL(frompc, selfpc) \
static void mcount_internal (u_long frompc, u_long selfpc)
- 修改后
#define _MCOUNT_DECL(frompc, selfpc) \
void mcount_internal (u_long frompc, u_long selfpc)
8. 修改‘sysdeps/unix/sysv/linux/arm/ioperm.c’文件(第 98 ~ 104行)
- 修改前
static int
init_iosys (void)
{
char systype[256];
int I, n;
static int iobase_name[] = { CTL_BUS, BUS_ISA, BUS_ISA_PORT_BASE };
static int ioshift_name[] = { CTL_BUS, BUS_ISA, BUS_ISA_PORT_SHIFT };
- 修改后
#include <linux/version.h>
static int
init_iosys (void)
{
char systype[256];
int I, n;
#if LINUX_VERSION_CODE < 132119
static int iobase_name[] = { CTL_BUS, BUS_ISA, BUS_ISA_PORT_BASE };
static int ioshift_name[] = { CTL_BUS, BUS_ISA, BUS_ISA_PORT_SHIFT };
#else
static int iobase_name[] = { CTL_BUS, CTL_BUS_ISA, BUS_ISA_PORT_BASE };
static int ioshift_name[] = { CTL_BUS, CTL_BUS_ISA, BUS_ISA_PORT_SHIFT };
#endif
- 创建一个目录对 ‘glibc’进行编译
- mkdir build
- cd build
9. 安装编译环境
- CC=arm-linux-gcc ../configure –host=arm-linux –build=i686-pc-linux-gnu \
--prefix=/usr/local/arm/arm-linux –with-headers=/usr/src/linux/include \
--enable-add-ons=linuxthreads –enable-shared
10. 编译平台。 如果你在编译‘csu/version-info.h’文件时发生错误,打开 &修正这个文件并且重新编译。 (第1~4行)
- make
- 修改前
“Compiled on a Linux >>2.6.24-16-generic<< system on 2008-10-14
“
“Available extensions:
“
- 修改后
“Compiled on a Linux >>2.6.24-16-generic<< system on 2008-10-14“
“Available extensions:“
- make
11. 安装编译的 ‘glibc’程序库.
- Make install
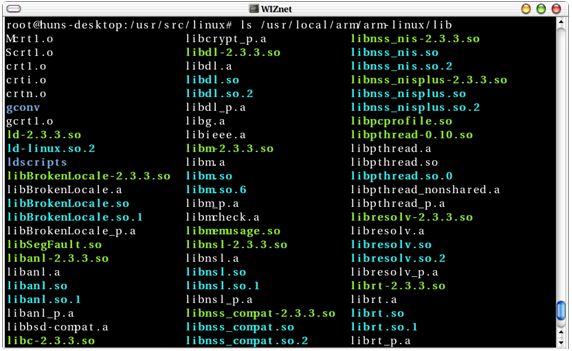
12. 检查安装的 ‘glibc’ 程序库
- ls /usr/local/arm/arm-linux/lib
7 ‘gcc’重新安装
到这里,我们已经准备好了交叉编译器的开发环境。重新安装 ‘gcc’, 交叉编译器就完成了安装.
1. 删除以前使用过的 ‘gcc’代码
- cd /cross_tools/
- rm –rf gcc-3.4.3
2. 解压 ‘gcc’ 源代码.
- tar jxvf gcc-3.4.3.tar.bz2
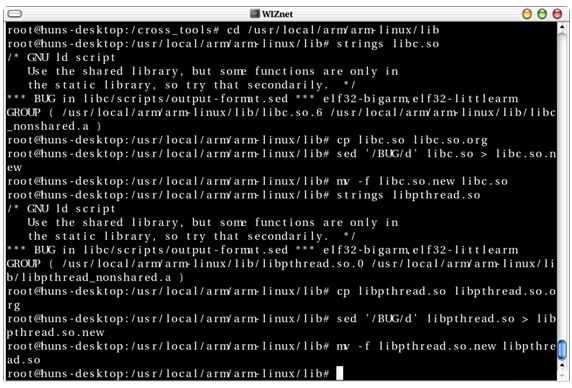
3. 为了防止对程序库的依赖而做以下修改
- cd /usr/local/arm/arm-linux/lib
- strings libc.so
- cp libc.so libc.so.org
- sed ‘/BUG/d’ libc.so > libc.so.new
- mv –f libc.so.new libc.so
- strings libpthread.so
- cp libpthread.so libpthread.so.org
- sed ‘/BUG/d’ libpthread.so > libpthread.so.new
- mv –f libpthread.so.new libpthread.so
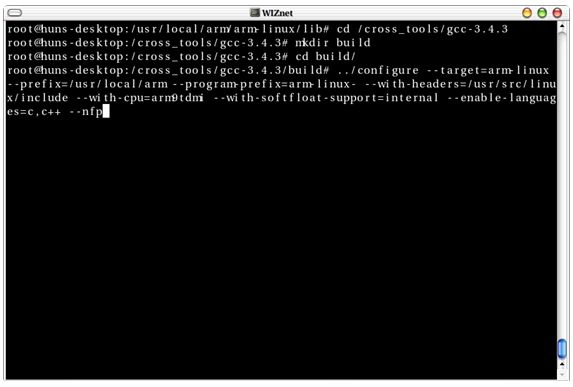
4. 创建用于‘gcc’ 编译的目录
- cd /cross_tools/gcc-3.4.3
- mkdir build
- cd build
5. 配置编译环境
- ../configure –taeget=arm-linux –prefix=/usr/local/arm –program-prefix=arm-linux- \
--with-headers=/usr/src/linux/include –with-cpu=arm9tdmi \
--with-softfloat-support=internal –enable-languages=c,c++ --nfp
6. 编译与安装
- make
- Make install
8 测试
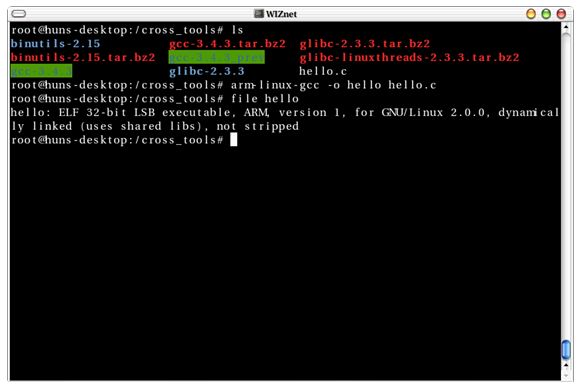
1. 我们以 ‘Hello WIZnet’为例来做测试.
- 输入 ‘/cross_tools/hello.c’
#include <stdio.h>
Int main(void)
{
printf(“Hello WIZnet\n”);
return 0;
}
2. 用新创建的交叉编译器编译 ‘hello.c’ 源代码.
- arm-linux-gcc –o hello hello.c
- file hello
3. 在连接‘W5300E01-ARM’ 板和PC以后, 执行 ‘minicom’。然后,接通‘W5300E01-ARM’ 板电源。 想更多了解关于‘minicom’ 配置的详细信息, 请参考 ‘W5300E01-ARM用户手册’, ‘4.1.2 Booting Check at the Linux’的部分.
- minicom
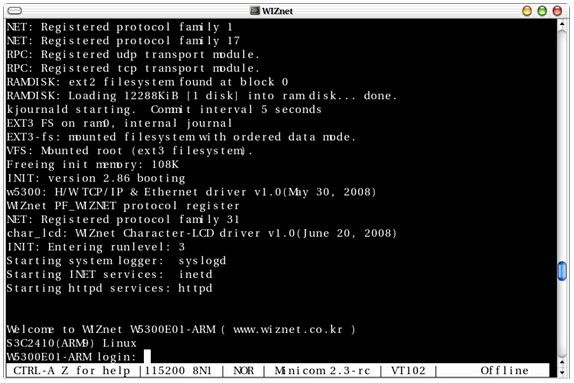
4. 系统启动之后,登入 ‘root’ 把‘hello’ 发送到W5300串口中
- root
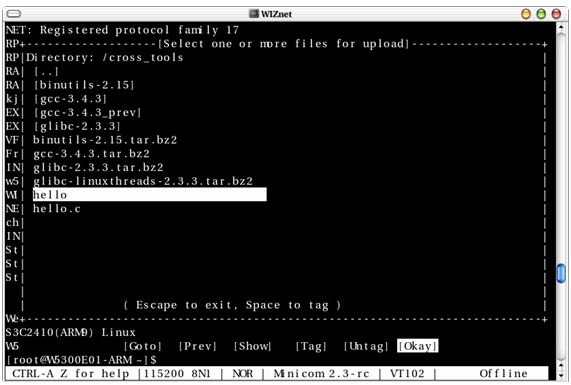
- ‘Ctrl’ + ‘a’,’s’
- 选择 ‘Zmodem’
- 移动到 ‘/cross_tools’
- 用空格键选择‘hello’文件
- 点击回车键把文件从PC发送到‘W5300E01-ARM’
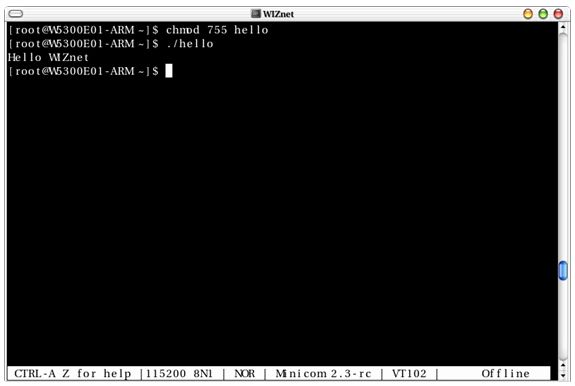
5. 在‘W5300E01-ARM’板中执行 ‘hello’
- chmod 755 hello
- ./hello
感谢阅读!
更多信息与我们交流:
WIZnet邮箱:[email protected]