【PCL】Segmentation 模块—— 圆柱模型分割(Cylinder model segmentation)
1、简介
PCL(Point Cloud Library)中的圆柱模型分割Cylinder Model Segmentation是一种从点云数据中提取圆柱体模型的技术。它通过识别点云中符合圆柱体几何形状的部分,将圆柱体从其他几何形状中分离出来。
1.1 主要步骤
-
预处理:
- 对点云进行去噪、下采样等操作,以减少数据量并提升处理效率。
-
法线估计:
- 计算点云中每个点的法线,用于后续的模型拟合。
-
模型拟合:
- 使用RANSAC(随机采样一致性)算法拟合圆柱体模型。RANSAC通过随机采样点来估计模型参数,并评估其与点云的拟合程度。
-
分割:
- 根据拟合的圆柱体模型,将点云中符合该模型的内点(inliers)与不符合的外点(outliers)分离。
-
后处理:
- 对分割结果进行优化,如去除噪声或进一步细化圆柱体参数。
1.2 应用场景
- 工业检测:识别管道、圆柱形零件等。
- 机器人:用于导航和物体抓取。
- 建筑建模:提取建筑物中的圆柱形结构。
2、代码实现
代码为圆柱形模型运行一个样本共识分割,由于数据中存在噪声,圆柱模型并不完美。为了使示例更实际一些,将以下操作应用于输入数据集(按顺序):
-
距离大于1.5米的数据点被过滤
-
估计每个点的表面法线
-
一个平面模型(描述我们演示数据集中的表)被分割并保存到磁盘上
-
一个圆柱形模型(在我们的演示数据集中描述杯子)被分割并保存到磁盘上
2.1 cylinder_segmentation.cpp
#include 2.2 CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(cylinder_segmentation)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (${PROJECT_NAME} cylinder_segmentation.cpp)
target_link_libraries (${PROJECT_NAME} ${PCL_LIBRARIES})
3、运行结果
- 编译运行
mkdir build && cd build
cmake ..
make
./cylinder_segmentation
-
结果
-
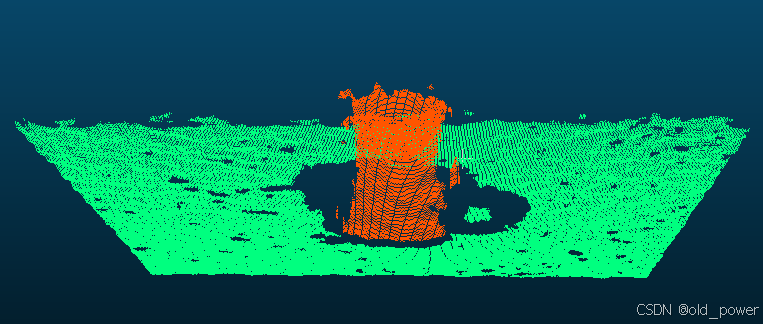
点云处理前
table_scene_mug_stereo_textured.pcd
-
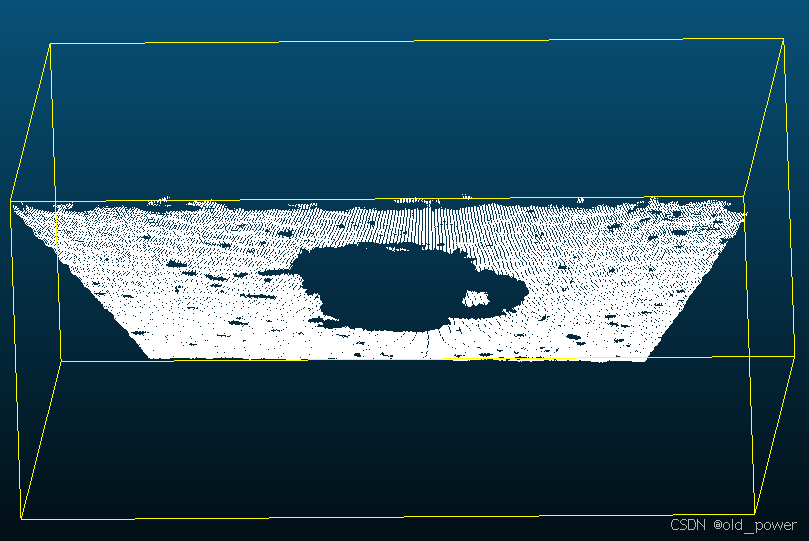
保存的平面点云
table_scene_mug_stereo_textured_plane.pcd
-
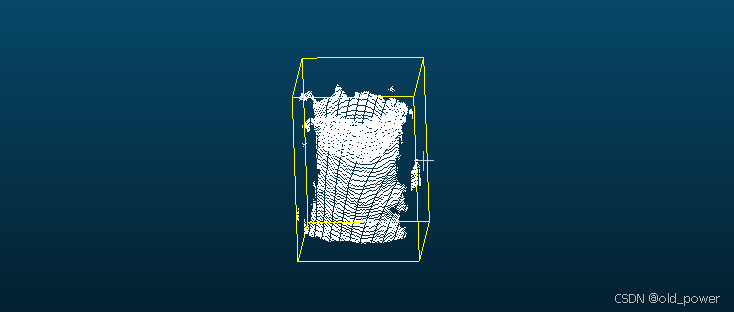
保存提取的圆柱体点云
table_scene_mug_stereo_textured_cylinder.pcd
4、代码解读
4.1 头文件引入
- ModelCoefficients:用于存储模型参数(如平面、圆柱体的方程系数)。
- pcd_io:用于读取和保存PCD格式的点云文件。
- point_types:定义了点云中点的类型(如
pcl::PointXYZ)。 - filters:包含点云滤波工具(如
ExtractIndices和PassThrough)。 - features:包含点云特征计算工具(如法线估计
NormalEstimation)。 - sample_consensus:包含RANSAC算法及其相关模型(如平面、圆柱体)。
- segmentation:包含点云分割工具。
4.2 类型定义
typedef pcl::PointXYZ PointT;
- 定义
PointT为pcl::PointXYZ,表示点云中的点类型为三维坐标点(x, y, z)。
4.3 初始化对象
- reader:用于读取PCD文件。
- pass:直通滤波器,用于裁剪点云。
- ne:法线估计器,用于计算点云中每个点的法线。
- seg:基于法线的分割器,用于分割平面和圆柱体。
- writer:用于保存点云数据到PCD文件。
- extract:用于从点云中提取特定索引的点。
- extract_normals:用于从法线点云中提取特定索引的法线。
- tree:KdTree对象,用于加速法线估计中的最近邻搜索。
4.4 数据集初始化
- cloud:存储原始点云数据。
- cloud_filtered:存储滤波后的点云数据。
- cloud_normals:存储点云的法线数据。
- cloud_filtered2:存储去除平面后的点云数据。
- cloud_normals2:存储去除平面后的法线数据。
- coefficients_plane和coefficients_cylinder:分别存储平面和圆柱体的模型系数。
- inliers_plane和inliers_cylinder:分别存储平面和圆柱体的内点索引。
4.5 平面分割代码
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_NORMAL_PLANE);
seg.setNormalDistanceWeight(0.1);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setMaxIterations(100);
seg.setDistanceThreshold(0.03);
seg.setInputCloud(cloud_filtered);
seg.setInputNormals(cloud_normals);
seg.segment(*inliers_plane, *coefficients_plane);
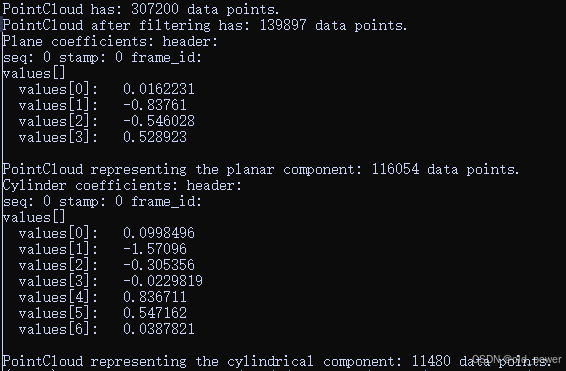
std::cerr << "Plane coefficients: " << *coefficients_plane << std::endl;
-
setOptimizeCoefficients(true):- 启用模型系数优化。在拟合模型后,进一步优化模型参数以提高精度。
-
setModelType(pcl::SACMODEL_NORMAL_PLANE):- 设置分割模型类型为带法线的平面模型。该模型不仅使用点的坐标,还使用点的法线信息来拟合平面。
-
setNormalDistanceWeight(0.1):- 设置法线距离权重。该参数控制法线信息在模型拟合中的重要性。值越大,法线的影响越大。
-
setMethodType(pcl::SAC_RANSAC):- 使用RANSAC算法进行模型拟合。RANSAC是一种鲁棒的拟合算法,能够有效处理噪声和离群点。
-
setMaxIterations(100):- 设置RANSAC算法的最大迭代次数为100。迭代次数越多,拟合结果越精确,但计算时间越长。
-
setDistanceThreshold(0.03):- 设置距离阈值。点到模型的距离小于该阈值的点被视为内点(inliers)。该值越小,拟合的模型越精确。
-
setInputCloud(cloud_filtered):- 设置输入点云为滤波后的点云(
cloud_filtered)。
- 设置输入点云为滤波后的点云(
-
setInputNormals(cloud_normals):- 设置输入点云的法线数据(
cloud_normals)。
- 设置输入点云的法线数据(
-
seg.segment(*inliers_plane, *coefficients_plane):- 执行平面分割,将内点索引存储在
inliers_plane中,平面模型的系数存储在coefficients_plane中。
- 执行平面分割,将内点索引存储在
-
std::cerr << "Plane coefficients: " << *coefficients_plane << std::endl;:- 输出平面模型的系数。平面方程的一般形式为:
Ax + By + Cz + D = 0,其中coefficients_plane存储了[A, B, C, D]。
- 输出平面模型的系数。平面方程的一般形式为:
4.6 圆柱体分割代码
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_CYLINDER);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setNormalDistanceWeight(0.1);
seg.setMaxIterations(10000);
seg.setDistanceThreshold(0.05);
seg.setRadiusLimits(0, 0.1);
seg.setInputCloud(cloud_filtered2);
seg.setInputNormals(cloud_normals2);
seg.segment(*inliers_cylinder, *coefficients_cylinder);
std::cerr << "Cylinder coefficients: " << *coefficients_cylinder << std::endl;
-
setOptimizeCoefficients(true):- 启用模型系数优化。
-
setModelType(pcl::SACMODEL_CYLINDER):- 设置分割模型类型为圆柱体模型。
-
setMethodType(pcl::SAC_RANSAC):- 使用RANSAC算法进行模型拟合。
-
setNormalDistanceWeight(0.1):- 设置法线距离权重。
-
setMaxIterations(10000):- 设置RANSAC算法的最大迭代次数为10000。圆柱体模型的拟合通常比平面模型更复杂,因此需要更多的迭代次数。
-
setDistanceThreshold(0.05):- 设置距离阈值。点到圆柱体模型的距离小于该阈值的点被视为内点。
-
setRadiusLimits(0, 0.1):- 设置圆柱体半径的范围。半径必须在该范围内才会被接受。
-
setInputCloud(cloud_filtered2):- 设置输入点云为去除平面后的点云(
cloud_filtered2)。
- 设置输入点云为去除平面后的点云(
-
setInputNormals(cloud_normals2):- 设置输入点云的法线数据(
cloud_normals2)。
- 设置输入点云的法线数据(
-
seg.segment(*inliers_cylinder, *coefficients_cylinder):- 执行圆柱体分割,将内点索引存储在
inliers_cylinder中,圆柱体模型的系数存储在coefficients_cylinder中。
- 执行圆柱体分割,将内点索引存储在
-
std::cerr << "Cylinder coefficients: " << *coefficients_cylinder << std::endl;:- 输出圆柱体模型的系数。圆柱体模型的系数通常包括:
- 圆柱体轴线的方向向量(3个值)。
- 圆柱体轴线上某一点的坐标(3个值)。
- 圆柱体的半径(1个值)。
- 输出圆柱体模型的系数。圆柱体模型的系数通常包括:
4.7 平面和圆柱体分割的区别
| 参数 | 平面分割 | 圆柱体分割 |
|---|---|---|
| 模型类型 | pcl::SACMODEL_NORMAL_PLANE |
pcl::SACMODEL_CYLINDER |
| 法线权重 | 0.1 | 0.1 |
| 最大迭代次数 | 100 | 10000 |
| 距离阈值 | 0.03 | 0.05 |
| 半径限制 | 无 | [0, 0.1] |
| 输入点云 | cloud_filtered |
cloud_filtered2 |
| 输入法线 | cloud_normals |
cloud_normals2 |