【ATU 随笔记】整车网路系统架构之探讨 ( 一 )
一、前言
在现今的车辆设计中,通讯架构扮演着至关重要的角色,以确保车内各个电子控制单元(Electronic Control Unit, ECU)能够快速且可靠地交换资讯。车用通讯协议的选择多样且具备不同的应用特性,其中包括 CAN(Controller Area Network)、LIN(Local Interconnect Network)、Ethernet 和 FlexRay 等。每一种通讯协议皆有其特定的应用范畴与优势,如 CAN 以其可靠性和低成本在车辆动力系统与车身控制中广泛应用,LIN 则适合在低速且简单的设备之间传输讯号,而 Ethernet 和 FlexRay 则以其高传输速率,支援车辆先进的自动驾驶与多媒体应用。
CAN 是 Bosch 公司于 1983 年代为了解决车内控制系统之间的通讯需求而开发的,并在 1986 年正式发表。随著 CAN 协议的推出,汽车内部的电子设备得以使用单一双绞线网路进行多主控制器之间的通讯,有效减少了传统线束的数量并提高了系统的可靠性。CAN 的低延迟和高抗干扰能力,使其迅速成为车辆控制系统的标准通讯协议。
在这一系列文章中,我们将逐步探讨各种车用通讯协议的需求差异与重要性,并首先聚焦于 CAN。在这篇文章中,我们将一起探讨 CAN 的技术基础,及其在车辆内部不同应用场景中的实际应用,并分析它在整车网路中的优势和面临的挑战。
二、CAN 的发展历程
CAN (Controller Area Network) 旨在解决汽车内部电子控制单元(ECU)之间日益增长的通讯需求。随著车辆电子化程度提高,车内系统的资料传递愈加复杂,传统点对点的连接方式无法有效支持这些系统的互通。因此,Bosch 公司开始开发一种多主总线系统,并在 1986 年正式发布 CAN 1.0 协议。
- CAN 1.0(1986)及 ISO 11898 标准(1993)
CAN 1.0 是最早期的版本,提供了一个高效且可靠的通讯方式,其架构允许多个节点共用同一条双绞线总线进行通讯。CAN 1.0 的最大速率为 1 Mbps,适合车辆内部如引擎控制、变速箱控制和车身电子控制等需要稳定和即时资料交换的场景。
为了确立 CAN 的全球通用标准并提高其应用一致性,国际标准化组织 (ISO)于 1993 年推出了 ISO 11898 标准。ISO 11898 规范了 CAN 网路的物理层和资料链路层的设计与实作,涵盖了总线拓扑、讯号传输方式、错误处理和抗干扰机制等关键细节。此标准的制定使 CAN 成为全球汽车制造商的通用协议,并推动了其在工业自动化和其他领域的广泛应用。
- CAN FD(Flexible Data-rate)(2012)
随著车辆技术的进步,标准 CAN 1.0 的传输速率和资料容量逐渐无法满足自动驾驶和车辆安全系统等应用的需求。因此,Bosch 在 2012 年推出了 CAN FD (Flexible Data-rate),这是 CAN 的改进版本。CAN FD 保留了 CAN 1.0 的基本架构,但在以下几个方面进行了升级:
提升资料速率:CAN FD 可以在传输资料时段提升至 8 Mbps,大幅提高了资料传输效率。
扩展讯框大小:CAN FD 支援更大的资料栏位(最多 64 bytes,相较于 CAN 1.0 的 8 bytes),使其能够一次传输更多资料。
保持向下相容性:CAN FD 保留了与传统 CAN 网路的相容性,这使得车辆制造商可以逐步升级至 CAN FD,而不必全面更换网路系统。
ISO 11898-1(2015)标准更新:为了支援 CAN FD 的新特性,ISO 在 2015 年更新了 ISO 11898-1 标准,加入了 CAN FD 的规范,这使其具备更高的弹性和兼容性。
- CAN SIC(Signal Improvement Capability CAN)
CAN SIC 是在 CAN FD 基础上进行优化的版本,专门为了应对现代车辆中常见的信号完整性问题而设计。随著车辆电子系统的复杂性和传输速率的增加,CAN SIC 的设计旨在增强讯号的稳定性和抗干扰能力,使其在高负载和高干扰环境下仍能维持稳定的传输效果。以下是 CAN SIC 的几个主要特点:
改进信号波形:CAN SIC 透过改进信号的上升和下降时间,减少了反射波(reflection)的产生,从而降低了讯号传输过程中的过度振铃(ringing)现象。这种改进让 CAN 网路在长距离传输或网路拓扑较为复杂的情况下,依然保持稳定的讯号品质。
增强抗干扰能力:CAN SIC 增强了对外部电磁干扰(EMI)的抵抗力,使其在高干扰环境下依然能保持高可靠性的资料传输。
支援更复杂的网路拓扑:与传统的 CAN FD 相比,CAN SIC 能够更好地支援星形拓扑(star topology)和长距离分支(long stubs),这些拓扑在 CAN FD 系统中可能导致讯号反射问题。CAN SIC 的信号改进技术可以减少这些拓扑中的反射现象,确保通讯的稳定性。
提升长距离通讯的稳定性:CAN SIC 通过在讯号传输中引入增强的阻抗匹配技术,使其在长距离传输中减少讯号衰减(attenuation)和失真。
相容性与 ISO 11898 标准支持:CAN SIC 在保持与现有 CAN FD 相容性的同时,通过改进讯号处理技术提升了网路性能。ISO 11898 标准中也对 CAN SIC 进行了技术规范,确保其可以整合于现有的 CAN 网路框架中,无需大幅改变现有硬体。
- CAN XL(Extra Long CAN)(2020)
随著车内通讯对于高带宽和灵活性的需求不断增加,CAN XL 于 2020 年被引入。CAN XL 是 CAN 家族的最新版本,设计用于应对车辆内部大量数据交换和自动驾驶系统的需求。CAN XL 在多个方面进行了重大升级:
更高的速率:CAN XL 支援高达 10 Mbps 的传输速率,满足更高带宽的需求。
扩展讯框大小:CAN XL 扩展了讯框的资料长度,允许更大容量的数据传输,使其在车辆多媒体系统和高精度感测器数据传输中尤为有用。
新的资料链路层特性:CAN XL 结合了现代网路技术的特性,如分段式数据传输和更灵活的资料传送协议,以增强其灵活性和适应性。
CAN XL 仍然符合 ISO 11898 标准架构中的基本规范,确保其在新特性上的扩展依然符合 CAN 网路的整体框架。
三、CAN 的特点与应用场景

如上表可以看到,CAN 1.0 主要是对应基本的车辆控制器系统,对于传输速率的要求不高,但要求通讯稳定且可靠;CAN FD 则适合用于车辆安全系统,如安全气囊、ADAS ( Advanced Driver Assistance Systems,先进驾驶辅助系统 )…等,借由 CAN FD 高速传输速率及更大的讯框大小来处理大量的感测器数据及内部的实时通讯;CAN SIC 则专为解决高干扰和复杂拓扑结构下的应用而设计,特别是在电动车和大型车辆(如卡车、公共汽车)中,这些车辆的网路系统往往涉及更长的传输距离和更复杂的拓扑结构(如星形和环形);而CAN XL 则是目前最新的 CAN 通讯技术,旨在满足新型汽车(尤其是电动车和高度自动化车辆)对于高速和大数据量传输的需求。
这些不同等级的 CAN 协议反映了 CAN 技术在应对现代汽车电子系统需求时的演进过程,每一个版本的升级都旨在提高通讯速率、扩展数据容量、增强抗干扰能力以及提升灵活性。
四、恩智浦提供的解决方案
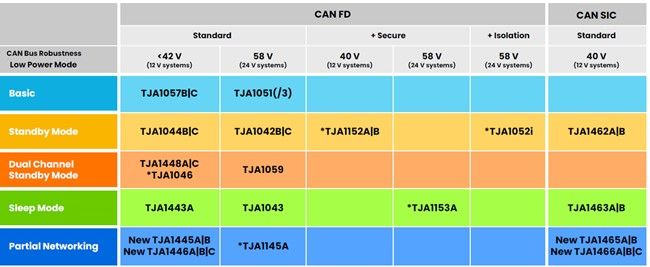
图片来源:恩智浦官方网站
恩智浦(NXP)作为全球领先的汽车电子供应商,提供了各式成熟且多样化的 CAN 解决方案,涵盖了 CAN FD 和 CAN SIC 技术,以满足不同车辆应用的需求。从基本模式到待机模式、双通道待机模式、休眠模式及部分网路模式,恩智浦的解决方案具备了高度的灵活性和可靠性,适用于 12V 和 24V 系统。
对此,小编认为随著自动驾驶技术和电动车市场的快速发展,车辆对于通讯系统的需求愈发复杂和多样化。恩智浦未来可能进一步推进 CAN SIC 和 CAN XL 技术的应用,支持更高速、更大容量的数据传输,并强化车辆网路的安全性和稳定性。
五、参考资料
- https://zh.wikipedia.org/zh-tw/%E6%8E%A7%E5%88%B6%E5%99%A8%E5%8D%80%E5%9F%9F%E7%B6%B2%E8%B7%AF#cite_note-can-cia-1
- https://libap.nhu.edu.tw:8081/Ejournal/AY03002603.pdf
- https://www.bsmi.gov.tw/wSite/public/Attachment/f1253852960891.pdf
- 從CAN的發展史,聊聊如何選擇車載網絡方案 - 大大通(繁體站)
- https://zh.wikipedia.org/zh-tw/CAN_FD
- https://site.eettaiwan.com/events/ev2023/file/Teledyne-5.pdf
- https://www.nxp.com/docs/en/supporting-information/NETWORKING-CAMPAIGN-AA.pdf