代码随想录算法训练day65---图论系列9《dijkstra(堆优化版)&Bellman_ford 算法》
代码随想录算法训练
—day64
文章目录
- 代码随想录算法训练
- 前言
- 一、47. 参加科学大会-----dijkstra(堆优化版)
- 二、94. 城市间货物运输 I---Bellman_ford 算法
- 总结
前言
今天是算法营的第65天,希望自己能够坚持下来!
今天继续图论part!今日任务:
● dijkstra(堆优化版)
●Bellman_ford 算法
一、47. 参加科学大会-----dijkstra(堆优化版)
卡码网题目链接
文章讲解
朴素版的dijkstra因为用的是邻接矩阵(二维数组)来存储图,有n个节点就要开辟n*n的二维数组。
在最小生成树的时候,有两个算法,prim算法(从点的角度来求最小生成树)、Kruskal算法(从边的角度来求最小生成树)
那么当n很大的时候,也有另一个思考维度,即:从边的数量出发。
那么我们就考虑用邻接表来存储图,vector grid(n + 1);。但是因为题目是由权值的,所以这里我们用vector
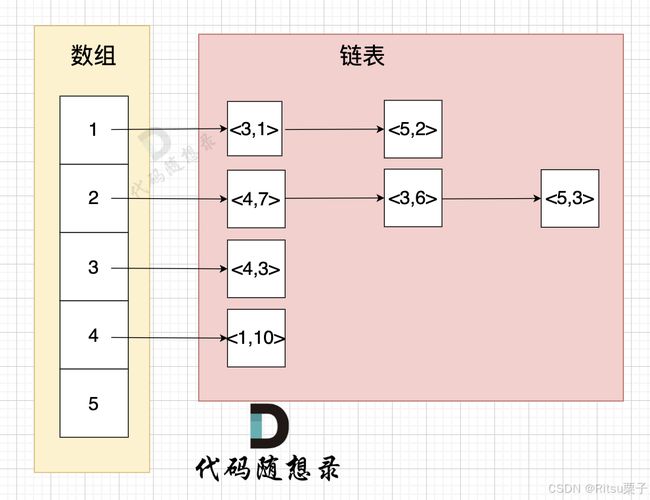
但是在代码中 使用 pair
所以可以定义一个结构体
struct Edge {
int to; // 邻接顶点
int val; // 边的权重
Edge(int t, int w): to(t), val(w) {} // 构造函数
};
优化思路:
1.用邻接表来代替邻接矩阵存储图
2.因为有权值,定义一个结构体作为邻接表的类型vector grid(n + 1);
3.定义一个小顶堆,用优先队列来排序所有边的权值,按小到大排序。
4.循环弹出优先队列中的边,接着依然是标记访问过的节点,并且更新minDist。
更新minDist:
朴素dijkstra是for循环遍历所有节点,然后更新当前节点cur指向的节点对应的minDist。那么使用邻接表存储图之后,就不需要遍历所有节点了,直接遍历cur节点的那一个表就是所有“cur指向的节点”了,所以
// 3. 第三步,更新非访问节点到源点的距离(即更新minDist数组)
for (Edge edge : grid[cur.first]) { // 遍历 cur指向的节点,cur指向的节点为 edge
// cur指向的节点edge.to,这条边的权值为 edge.val
if (!visited[edge.to] && minDist[cur.first] + edge.val < minDist[edge.to]) { // 更新minDist
minDist[edge.to] = minDist[cur.first] + edge.val;
pq.push(pair<int, int>(edge.to, minDist[edge.to]));
}
}
这里需要注意更新完minDist后要把新的minDist作为边最新的权值添加到优先队列中。
代码如下:
#include
#include是指定优先队列的存放容器
priority_queue<pair<int,int>, vector<pair<int,int>>, mycomparison> pq;
//初始化队列,源点到源点的距离为0,所以初始化为0
pq.push(pair<int,int>(start, 0));
minDist[start] = 0; //起始点到自身的距离为0
while (!pq.empty()) {
//1.第一步,找到离源点最近的节点且该节点未被访问过(通过优先队列实现了)
//<节点,源点到该节点的距离>
pair<int, int> cur = pq.top(); pq.pop();
if (visited[cur.first]) continue;
//2.第二步,标记该节点被访问过
visited[cur.first] = true;
//3.第三步,更新minDist数组
for (Edge edge: grid[cur.first]) { //遍历cur指向的节点,cur指向的节点为edge
//cur指向的节点edge.to, 这条边的权值为edge.val
if (!visited[edge.to] && minDist[cur.first] + edge.val < minDist[edge.to]) {
minDist[edge.to] = minDist[cur.first] + edge.val;
pq.push(pair<int,int>(edge.to, minDist[edge.to]));
}
}
}
if (minDist[end] == INT_MAX) cout << -1 << endl;
else cout << minDist[end] << endl;
}
二、94. 城市间货物运输 I—Bellman_ford 算法
卡码网题目链接
文章讲解
本题依然是单源最短路问题,求 从 节点1 到节点n 的最小费用。 但本题不同之处在于 边的权值是有负数了。所以不能用dijkstra算法。
Bellman_ford算法的核心思想是 对所有边进行松弛n-1次操作(n为节点数量),从而求得目标最短路。
对所有边进行1次松弛操作,就是获得 与起点 一条边相连的节点最短距离。
对所有边进行2次松弛操作, 就是获得 与起点 两条边相连的节点的最短距离。
以此类推,最后进行n-1次松弛操作就会或的 起点与n-1条边相连的节点的最短距离。
代码如下:
#include
#include总结
-
dijkstra算法堆优化:
1.用邻接表来代替邻接矩阵存储图
2.因为有权值,定义一个结构体作为邻接表的类型vector- grid(n + 1);
3.定义一个小顶堆,用优先队列来排序所有边的权值,按小到大排序。
4.循环弹出优先队列中的边,接着依然是标记访问过的节点,并且更新minDist。 -
Bellman_ford 算法:
1.适合权值有负数的求起点到终点的最短距离问题
2.对所有边进行n-1次的松弛操作
3.什么是松弛?
if (minDist[from] != INT_MAX && minDist[to] > minDist[from] + price) {
minDist[to] = minDist[from] + price;
}
明天继续加油!