松灵Cobot Magic&ARIO,打造具身智能百万规模标准化数据集
具身人工智能开发的三大主要挑战:
数据格式不统一:多源异构数据整合困难,训练资源利用率低。
场景多样性不足:现有数据集覆盖场景有限,模型泛化能力受限。
高质量数据稀缺:标注数据不足,难以满足大规模训练需求,制约性能提升。
松灵Cobot Magic:真实场景数据采集的核心平台
为应对以上挑战,南科大提出来ARIO(All Robots In One)数据集,松灵Cobot Magic凭借以下优势成为硬件平台首选:
硬件适配性:协作机器人轻量化设计,支持家庭、实验室等多场景灵活部署与数据采集。
软件兼容性:兼容ROS生态,算法快速集成与跨平台迁移效率提升。
成本效益:相比传统工业臂,性价比更高,适合大规模实验与数据迭代。
安全交互:内置力控传感器,保障人机协作场景下的安全操作。
仿真联动:提供高精度仿真模型,支持虚实结合的数据生成策略(如Habitat、MuJoCo联动)。

ARIO 数据集:松灵Cobot Magic驱动的技术革新
ARIO概念:整合多源异构机器人数据并统一为标准化格式,通过松灵Cobot Magic的真实场景数据采集,提升具身智能跨场景泛化能力。
ARIO数据三大来源深度解析:
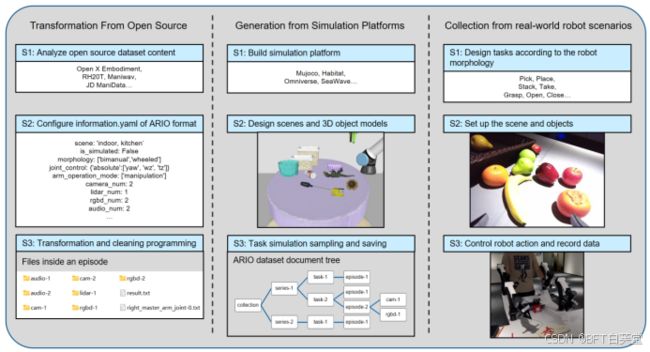
1、开源数据集转换
硬件平台:Cloud GingerXR-1机器人执行真实操作任务。
核心任务:精准拾取(400轨迹)、颜色分类(200轨迹)、色块推送(200轨迹)。
数据规模:生成800条多模态交互轨迹集,覆盖桌面操作场景。
2、模拟平台生成
仿真工具:基于Habitat、MuJoCo、SeaWave构建动态场景,随机设定目标位姿并添加干扰物。
任务复杂度:通过变换背景色及无关抽屉状态提升多样性。
成果:生成1700条ARIO格式轨迹数据,涵盖21类物体的导航与操纵任务。
3、松灵Cobot Magic真实场景采集
任务设计:30+标准化任务聚焦家庭桌面场景,模拟日常操作需求。
技能分层
基础技能:拾取、放置
复杂技能:扭转、插入、按压、切割
多样性增强
添加干扰物体增加操作难度
随机化物体与机器人初始位姿
动态调整环境布局(如家具摆放)
数据产出
生成3000+条多模态轨迹,同步记录3个RGB-D相机视角数据,支持三维空间操作分析。

毫厘不差!机械臂双臂叠杯实现‘零误差’突破
点击观看视频
现在,BFT已开通松灵CobotMagic绿色采购通道
技术突破:松灵Cobot Magic赋能ARIO的三大价值
数据驱动的高效训练
- 基于统一格式与多模态数据,训练效率提升50%+;
- 虚实融合数据减少对真实标注数据的依赖,降低采集成本。
- 强泛化性的场景适应
覆盖复杂环境干扰、动态障碍物等长尾场景,提升模型鲁棒性; - 支持仿真到现实的跨场景策略迁移,降低落地门槛。
开放生态的协同创新
- 开源数据集促进产学研技术共享;
- 兼容(ROS/Isaac Sim)等主流框架,迁移与集成成本降低。
应用场景:从科研到产业的全域覆盖
科研领域
算法验证:强化学习、具身智能算法快速迭代
多模态数据集构建:视觉/力觉/位姿数据联合采集
群体智能:多机器人协同任务规划实验
工业医疗场景
柔性制造:产线动态部署,适配小批量多品种生产
康复训练:基于Cobot Magic的运动轨迹引导与肌力评估。