如何使用STM32的通用定时器
目录
- 一、确定功能实现(示例)
-
- 1、输入捕获:测量脉宽
- 2、输出比较:输出PWM(1MHz周期,脉宽2KHz)
- 3、普通计时器:定时500ms = (5000*7200) / 72MHz
- 二、确定计数方式
- 三、确定时钟源
- 四、确定主、从模式
- 五、对应模式的设置
- 六、事件
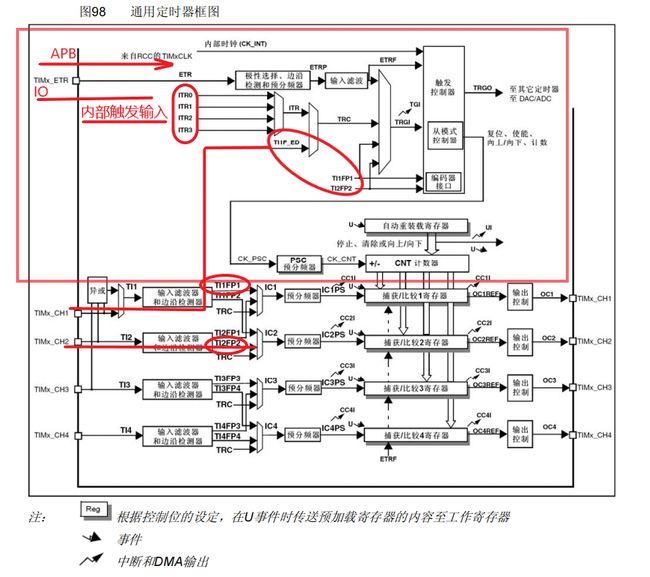
- 通用定时器框图
- 七、代码结构 (部分)
- 八、STM32CubeMX配置
一、确定功能实现(示例)
1、输入捕获:测量脉宽
时钟来源:外部输入引脚TI
计数方式:72MHz--1us精度,重装载值--65535,向上计数
主模式默认,从模式不开启。
捕获方式:上升沿捕获
2、输出比较:输出PWM(1MHz周期,脉宽2KHz)
计算周期 T o u t = ( A R R + 1 ) ∗ ( P S C + 1 ) F t T_{out}=\frac{(ARR+1)*(PSC+1)}{F_{t}} Tout=Ft(ARR+1)∗(PSC+1)
时钟来源:内部时钟来源
计数方式:ARR决定PWM周期,CCR决定PWM占空比,递增计数
ARR = 72 - 1,CCR = 500 -1;
主模式默认,从模式失能。
输出模式:PWM模式1,输出通道输出极性为:低电平有效
3、普通计时器:定时500ms = (5000*7200) / 72MHz
时钟来源:内部时钟来源
计数方式:72MHz--1us精度,重装载值--5000,向上计数
主模式默认,从模式失能。
二、确定计数方式
计数的精度(分频)、计数上限(重载值)、向上&向下
三、确定时钟源
内部时钟AHB:普通计数计时器
外部输入TI(TIMx_CH):输入捕获、编码器模式、PWM 输入
外部触发ETR(IO):触发定时器启动、停止、复位或作为时钟源
内部触发ITR:一个定时器作另一个定时器的预分频器(不常用)
四、确定主、从模式
(默认启用主模式的复位模式,关闭从模式)
常用的模式场景示例
定时器同步操作 主:更新/使能 从:触发
时间间隔测量 主:复位 从:复位
事件驱动计数 主:比较脉冲/OC1REF 从:触发模式
正交编码器处理 主:使能 从:编码器模式
1、主模式选择–(默认复位模式)
复位:当定时器产生更新事件时,输出一个复位信号。通常用于从定时器的复位。(默认使用该模式)
使能:当定时器启用时,输出一个使能信号。
更新:当定时器产生更新事件时,输出一个触发信号。
比较脉冲:当定时器的比较寄存器与计数器值匹配时,输出一个脉冲信号
比较 OC1REF、OC2REF 、OC3REF 、OC4REF模式。
2、从模式选择–(默认关闭)
复位模式:测量两个信号之间的时间间隔
门控模式:在特定时段内允许定时器计数。
触发模式:定时器在收到外部事件后开始工作,例如同步事件触发
外部时钟模式:使用外部信号源(如方波、脉冲)来控制定时器的计数
编码器模式:用于读取正交编码器的位置信息(仅TI1、TI2)
五、对应模式的设置
输入捕获:
通道映射选择:TI1、TI2、TI3、TI4
捕获极性:上升沿、下降沿、双边沿
滤波器:可以为输入信号配置滤波器,以滤除高频噪声。
输入预分频器:可以为输入信号设置预分频器,减慢输入信号的处理速率。例如,预分频为 2 时,每两个输入脉冲处理一次。
输出比较:
输出模式:OCxM配置,如下表
输出极性:高电平有效、低电平有效
比较值:CCR的值(可使用函数修改:__HAL_TIM_SET_COMPARE())
输出状态:使能
输出通道:TIMx_CH1、TIMx_CH2、TIMx_CH3、TIMx_CH4
| OCxM 配置值 | 模式名称 | 描述 |
|---|---|---|
000 |
冻结(Frozen) | 当计数器与比较值匹配时,输出保持不变。 |
001 |
活动电平(Set Active) | 当匹配时,将输出引脚设置为高电平。 |
010 |
非活动电平(Set Inactive) | 当匹配时,将输出引脚设置为低电平。 |
011 |
切换(Toggle) | 当匹配时,输出引脚电平反转(高电平变为低电平,低电平变为高电平)。 |
100 |
强制为低(Force Inactive) | 强制将输出引脚设置为低电平(忽略比较事件)。 |
101 |
强制为高(Force Active) | 强制将输出引脚设置为高电平(忽略比较事件)。 |
110 |
PWM 模式 1 | 计数器小于比较值时输出为高电平,计数器大于比较值时输出为低电平。 |
111 |
PWM 模式 2 | 计数器小于比较值时输出为低电平,计数器大于比较值时输出为高电平。 |
六、事件
- 更新事件
当定时器的计数器(CNT)溢出或者重新加载时,产生更新事件。这通常发生在计数器达到自动重装载寄存器(ARR)的值时。 - 捕获比较事件
当定时器的计数器值与某个捕获/比较寄存器(CCR1、CCR2 等)中的值匹配时,产生捕获或比较事件。 - 触发事件
触发事件是用于同步定时器或外部硬件的事件。当定时器配置为主定时器或从定时器时,主定时器可以通过触发事件启动从定时器。 - 中断事件
定时器产生的各种事件(如更新事件、捕获/比较事件等)可以通过中断机制通知 CPU。 - 溢出事件
溢出事件类似于更新事件,但它只发生在计数器向上计数超过最大值时(上溢出),或向下计数低于最小值时(下溢出)。
通用定时器框图
七、代码结构 (部分)
//一、通用定时器的基本设置
TIM_HandleTypeDef htim1;
__HAL_RCC_TIM1_CLK_ENABLE(); //使能TIM1时钟
htim1.Instance = TIM1; // 定时器x
htim1.Init.Prescaler = 72-1; // 定时器预分频
htim1.Init.CounterMode = TIM_COUNTERMODE_UP; // 递增计数模式:向上
htim1.Init.Period = 1000-1; // 自动重装载值
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; // 内部时钟分频(CK_INT)
htim1.Init.RepetitionCounter = 0; // 重复计数器
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; // 自动重装:失能
HAL_TIM_PWM_Init(&htim1);//注意使用对应的模式函数
//如要只需要使用基本定时器:HAL_TIM_Base_Init(&htim1)
//用到输入比较:HAL_TIM_IC_Init(&htim1);
//用到输出比较:HAL_TIM_OC_Init(&htim1);
//二、主模式或者从模式的配置
//1.主模式选择
TIM_MasterConfigTypeDef sMasterConfig = {0};
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; //复位模式
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;//从模式失能
HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig); //使能配置
//2.从模式选择
TIM_SlaveConfigTypeDef SlaveConfig = {0};
SlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET; //从模式:复位模式
SlaveConfig.InputTrigger = TIM_TS_TI1FP1; //定时器输入触发源:TI1FP1
SlaveConfig.TriggerPolarity = TIM_TRIGGERPOLARITY_RISING; //上升沿检测
SlaveConfig.TriggerFilter = 0; //不滤波
HAL_TIM_SlaveConfigSynchro(&htim1,&SlaveConfig); //使能配置
//三、输入或者输出模式的配置
//1.输出OC配置
TIM_OC_InitTypeDef sConfigOC = {0};
sConfigOC.OCMode = TIM_OCMODE_PWM1; //输出模式:PWM1
sConfigOC.Pulse = 50; //设置比较值:
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; //设置输出比较极性
//(一般常用配置上述参数)
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH; //设置互补输出比较极性
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; //使能或使能输出比较快速模式
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET; //空闲状态下OC1输出
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET; //空闲状态下OC1N输出
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1); //配置输出到TIM1通道1
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); //开始输出
//2.输入IC配置
TIM_IC_InitTypeDef sConfigIC = {0};
sConfigIC.ICPolarity = TIM_ICPOLARITY_RISING; //上升沿捕获
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI; //映射到TI1上
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
sConfigIC.ICFilter = 0; //配置输入滤波器,不滤波
HAL_TIM_IC_ConfigChannel(&htim1, &sConfigIC, TIM_CHANNEL_1); //配置输入到TIM1通道1
HAL_TIM_IC_Start(&htim1, TIM_CHANNEL_1); //开始捕获
//四、GPIO口配置
//PE9 -> TIM1_CH1
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_AFIO_REMAP_TIM1_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
//五、定时器的事件标志
#define TIM_FLAG_UPDATE TIM_SR_UIF /*!< Update interrupt flag */
#define TIM_FLAG_CC1 TIM_SR_CC1IF /*!< Capture/Compare 1 interrupt flag */
#define TIM_FLAG_CC2 TIM_SR_CC2IF /*!< Capture/Compare 2 interrupt flag */
#define TIM_FLAG_CC3 TIM_SR_CC3IF /*!< Capture/Compare 3 interrupt flag */
#define TIM_FLAG_CC4 TIM_SR_CC4IF /*!< Capture/Compare 4 interrupt flag */
#define TIM_FLAG_COM TIM_SR_COMIF /*!< Commutation interrupt flag */
#define TIM_FLAG_TRIGGER TIM_SR_TIF /*!< Trigger interrupt flag */
#define TIM_FLAG_BREAK TIM_SR_BIF /*!< Break interrupt flag */
#define TIM_FLAG_CC1OF TIM_SR_CC1OF /*!< Capture 1 overcapture flag */
#define TIM_FLAG_CC2OF TIM_SR_CC2OF /*!< Capture 2 overcapture flag */
#define TIM_FLAG_CC3OF TIM_SR_CC3OF /*!< Capture 3 overcapture flag */
#define TIM_FLAG_CC4OF TIM_SR_CC4OF /*!< Capture 4 overcapture flag */
补充:定时器基本配置解析
ClockDivision: 首先定时器时钟来源是来自APB的72MHz,通过CK_INT分频得到定时器的时钟频率,通常为DIV_1,即不分频为72MHz;
Prescaler : 设置预分频系数PSC,例如72,则说明72MHz/1 = 1MHz = 1us, CNT计数+1;
Period : 设置自动重装载值ARR,例如1000,则1000 x 1us = 1ms,说明计数到1000(1ms)为一个周期。
八、STM32CubeMX配置
stm32CubeMX输出PWM示例配置 ------ 蓝桥_吹雪