D3D矢量运算
1. 向量和点
需要掌握的向量运算有:加,减,乘以实数,求长,求单位向量,点乘,×乘。更重要的是,要明确其物理意义,具体的就随便找本线性代数课本看好了。它在图形学中的碰撞处理、物理模拟等常见技术中占有极重要的地位。同时也要明白点和向量的关系,点表示位置,向量表示一个方向的运动。D3D中的向量封装在D3DVECTOR结构的各个子类中(注意,c++中的类和结构只有默认访问权限上的区别),其中包含了常用的向量计算函数。如,D3DXVECTOR3代表一个三维向量。
2. 矩阵
需要掌握矩阵的基本计算,特别是乘法。矩阵在图形学中,主要D3D用于通过代数思想来实现缩放、转动、移动(平移)等视觉上重要的图像行为。D3D中的矩阵封装在D3DMATRIX的子类中,和向量一样,D3D也为我们实现了大部分的矩阵计算。
3. 图形变换的基本原理
我们在学习线性代数的时候,已经对矩阵和向量计算方面了解的比较清楚,相信大家都做过那些恶心人的证明题(本人考研的时候,线性代数证明题悲剧。。。),不过这里,我们要讨论的时,这些基础理论是怎么和图形的变换实现结合起来的。
3.1 你需要首先知道的一些细节
在D3D编程中,我们使用4*4的矩阵来实现变换,什么意思呢,就是说,我们用一个1*4的矩阵来代表一个向量或者一个点,设为小v,另外有个矩阵M为4*4矩阵来代表某种图形变换(放大,缩小,旋转,etc),然后vM即为变换后的点或者向量。
这里有个小问题,我们用4*4的矩阵来表示变换,是数学上的需要,但事实上,在3D世界中,1*3的向量或者点足以表现现实世界的位置和移动,那最后那一个数字用来做什么呢。事实上,规定1*4的矩阵来表示向量或者点,是因为矩阵乘法的需要(不然无法做乘法了嘛),当然,咱不能浪费,因此我们做一下规定:
(x, y, z, 0) for vectors
(x, y, z, 1) for points
这个规定事实上很严密,两个点的差即为向量,而两个向量加减后仍为向量。
3.2 简单变换1—缩放
虽然建模的实现方法很多,主流的方法是用一个个三角形组成一个立体模型,但当我们在操作建模对象是,仍是通过微观上操作点来实现对整体对象的操作。可能我说的有些迷糊,先看下下面的矩阵(原谅我使用书里的图,实在懒得去整这些数学符号):
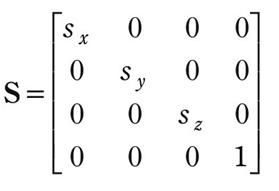
这个矩阵就是传中的缩放矩阵,一个向量或者点和他一乘,就实现缩放了。还是有些空洞吗,那我再拿一个书上的例子说明下:
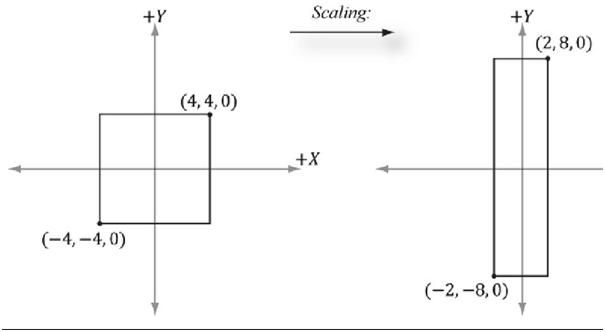
设有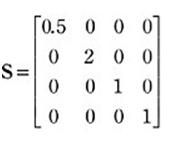
我们用两个点来表示一个矩形(2d的好理解些,3d其实一回事),分别为[4,4,4,1],[-4,-4,0,1],然后让他们都去乘以S就实现了缩放,下面的示图演示了缩放过程:
3.3 简单变换2—旋转
旋转相对来说要复杂些,首先看下面这张图,坐标系符合左手系:
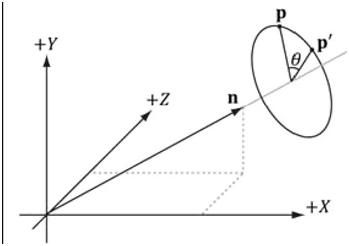
我们要让p点围绕n轴旋转θ度到p'处,怎么实现呢?其实还是乘一个矩阵,这个称为旋转矩阵:
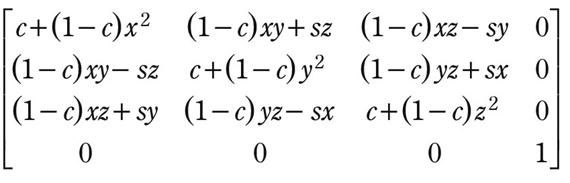
这个矩阵就没有缩放矩阵这么直观了,首先里面有很多参数,x,y,z是向量n的三维,即n=(x,y,z)。c = cos θ,s = sinθ。注意,在左手坐标系中,正角度对着n的方向的顺时针,即图中的θ是正角度。宏观的来说,也可以像上一节那样,用两点来表示一个正方形那样来模拟旋转的过程,这里就不详细说了。事实上,这个公式的推导我已经没啥印象了,如果有朋友对这块有兴趣,欢迎讨论哈。
3.4 简单变换3—移动(位移)
事实上,这个是最简单的,一个点加上一个向量即实现了一次位移,如下图:
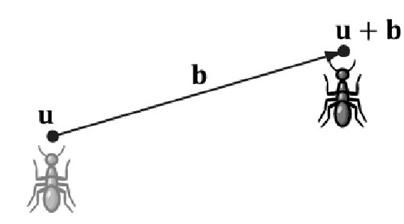
点u加上向量b就运动到了另一点。当然,为了将这种变换和别的变换统一起来,我们还是需要给出位移矩阵:
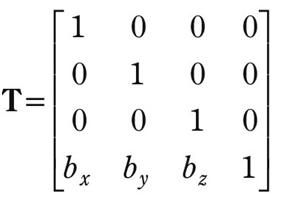
这个应该一目了然了吧,偶就不多解释了。
3.5 图形变换的D3D实现
以上三个矩阵,能铭记于心当然最好,记不住,理解了,应该也ok,因为d3d已经讲其封装为一个个函数供我们使用(opengl等图形api也有类似函数)。考虑到效率,使用这些函数的时候都尽量传引用。
这里再提一下优化的问题,由于我们将每种变换都规格化到了4*4的矩阵,3D引擎可以比较方便的实现优化,如果需要连续多个变换,可以先将变化矩阵相乘,最后再乘以点或者向量,这个在由几十万个点组成的模型的时候,效果是相当好的。
4. 坐标系转换
坐标转换是什么,就是同一个点或者向量,在不同的坐标系中会有不同的位置,向量和点本身没变,但由于坐标系变换了,其也跟着变化。事实上,在3d游戏中,是非常重要的。我们经常以视角能否自由移动来判断一个游戏使用的是真3d还是假3d,而我们在转换视角时,相当于在变换坐标系,事实上物体的位置没变,只是在不同的坐标系中展示而已(我只是举个例子,事实上视角的转换实现要复杂的多)。
4.1 向量的坐标转换
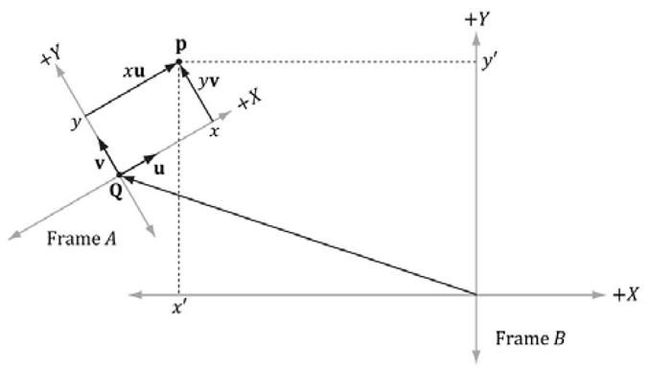
先考虑2D的情况,看下图:
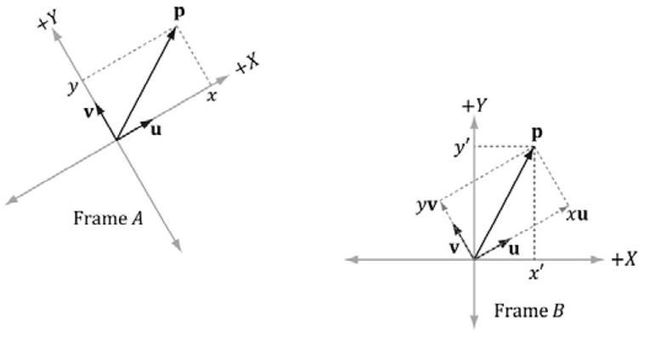
向量p本身不变,但在不同的坐标系Frame A和Frame B下,它会有不同的坐标值,我们分别记为x,y与x',y'。
下面是推导过程:
在FrameA中,![]() ,u,v为Frame A中的单位向量。
,u,v为Frame A中的单位向量。
转换到Frame B中,我们把u转换为Ub, V转换为Vb。
因此在Frame B中,我们得到等式![]() 。
。
推导到3D情况,我们有 。
。
思想应该很明显了吧,我们不修改P点的x,y指,而是讲其单位向量替换为相关转换坐标系中的两个向量(仍然是一个单位的向量,但不是指向x和y轴的)。
4.2 点的坐标系转换
我们再来看点的情况,这个也很简单,公式为 :
:
Z = 0的时候即为2D情况,下图可以说明推导过程: