mbed building
mbed

arduino的ARM版,API的封装和arduino的很相似,但是要比arduino更有野心。
如果arduino像个玩具,那mbed则像个精美的工业品。对arduino没有贬义,arduino影响了mbed、raspberry。
mbed的API有不少是用C++的封装的,可能吃资源(我没用过C++写过程序不知道)。
mbed也自带rtos,但是否好用留个大神评价吧(我没用过实时系统 — —!)
以下为mbed的美好愿景:

对mbed的分析文:
http://www.mbed.org.cn/archives/mbed-os%E4%BC%9A%E6%88%90%E4%B8%BA%E7%89%A9%E8%81%94%E7%BD%91%E7%9A%84-android-%E5%90%97%EF%BC%9F/
以下内容请大神自行绕路!
mbed building
关于 mbed building 说明官网也有但是不太全,github上的说明文档讲得比较全面。
https://github.com/mbedmicro/mbed/blob/master/docs/BUILDING.md
前提条件
python2.7
setuptools(https://pypi.python.org/pypi/setuptools)
pyserial(https://pypi.python.org/pypi/pyserial)
prettytable(https://pypi.python.org/pypi/PrettyTable)
intelHex(https://pypi.python.org/pypi/IntelHex)
jinja2(https://pypi.python.org/pypi/Jinja2)
markupsafe(安装jinja2的时候会附带安装)
colorama (https://pypi.python.org/pypi/colorama/)
mbed SDK
(https://github.com/mbedmicro/mbed)
C/C++编译器(keil4 and IAR)
building
先使用github for windows(https://windows.github.com/ 只支持win7,8 & 8.1)下载mbed
(这样不用敲git的命令行)
pip
pip install 安装第三方包
pip uninstall 卸载第三方包
pip freeze 按一定格式输出第三方包列表
pip list 查看已安装的第三方列表
pip show 显示第三方包所在的目录
pip search 寻找在 PyPI packages 上第三方包或者包含第三方包名字的文字描述
pip wheel 不知道何用,没看懂— —!
自动模式
然后在mbed的根目录下有setup.py文件,它包含了所有依赖的第三方包的信息,
调用它来自动完成所有依赖的第三方包的安装。
python的第三方包默认放在 X:\XXX\python2.7.9\Lib\site-packages的目录下
执行以下操作:
python setup.py install
安装完成相应的效果:
其实还需要安装jinja2,project.py会用到。
---------
手动模式 (我比较喜欢这种安装方式)
首先查看一下 pip和setupstools是否需要更新
pip list --outdated
更新 pip和setuptools
pip install --upgrade pip pip install --upgrade setuptools
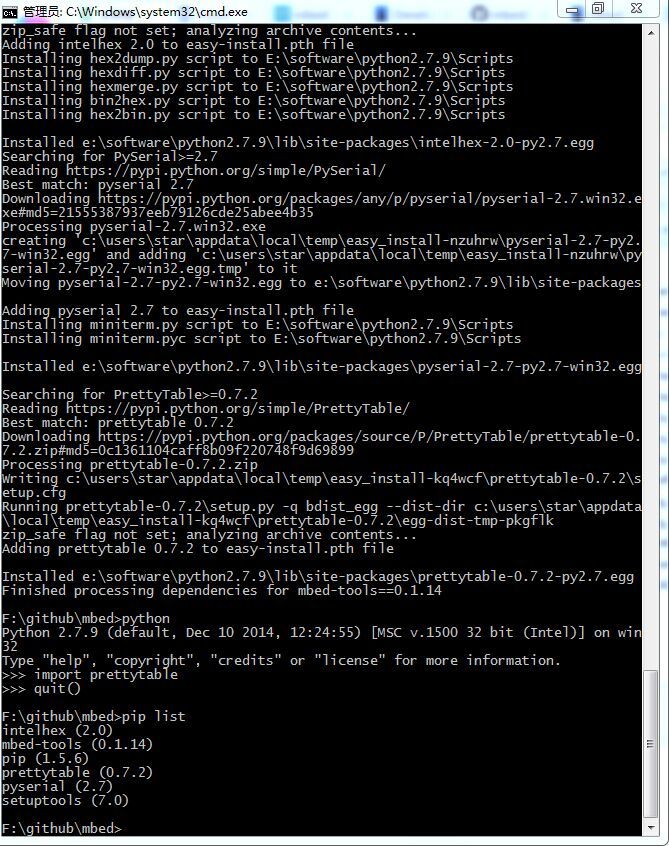
安装第三方包
pip install pyserial pip install prettytable pip install intelhex pip install jinja2
查看第三方包安装情况

Configure workspace tools to work with your compilers
需要在mbed/workspace_tools/下创建一个private_settings.py来配置路径来取代settings.py中默认的路径
from os.path import join
# ARMCC
armcc = "keil" # "keil", or "standalone", or "ds-5"
#ARM_PATH = "C:/Work/toolchains/ARMCompiler_5.03_117_Windows"
ARM_PATH = "E:/software/keil4/ARM/ARMCC"
ARM_BIN = join(ARM_PATH, "bin")
ARM_INC = join(ARM_PATH, "include")
ARM_LIB = join(ARM_PATH, "lib")
ARM_CPPLIB = join(ARM_LIB, "cpplib")
MY_ARM_CLIB = join(ARM_PATH, "lib", "microlib")
# GCC ARM
GCC_ARM_PATH = "C:/Work/toolchains/gcc_arm_4_8/4_8_2013q4/bin"
# GCC CodeSourcery
GCC_CS_PATH = "C:/Work/toolchains/Sourcery_CodeBench_Lite_for_ARM_EABI/bin"
# GCC CodeRed
GCC_CR_PATH = "C:/Work/toolchains/LPCXpresso_6.1.4_194/lpcxpresso/tools/bin"
# IAR
#IAR_PATH = "C:/Program Files (x86)/IAR Systems/Embedded Workbench 7.0/arm"
IAR_PATH = "E:/software/IAR/arm/bin/iccarm.exe"
SERVER_ADDRESS = "127.0.0.1"
LOCALHOST = "127.0.0.1"
# This is moved to separate JSON configuration file used by singletest.py
MUTs = {
}
ARM_PATHfor armcc compiler.GCC_ARM_PATHfor GCC ARM compiler.GCC_CS_PATHfor GCC CodeSourcery compiler.GCC_CR_PATHfor GCC CodeRed compiler.IAR_PATHfor IAR compiler.
Build Mbed SDK library from sources
从mbed源码包建立离线SDK库用于你的IDE
build.py script
C:\Users\sTAR>F: F:\>cd F:\github\mbed\workspace_tools F:\github\mbed\workspace_tools>python build.py -S -f NUCLEO_F103RB +---------------+-----------+-----------+---------+--------+-----------+--------+------------+---------------+ | Platform | ARM | GCC_ARM | uARM | GCC_CR | IAR | GCC_CS | GCC_CW_EWL | GCC_CW_NEWLIB | +---------------+-----------+-----------+---------+--------+-----------+--------+------------+---------------+ | NUCLEO_F103RB | Supported | Supported | Default | - | Supported | - | - | - | +---------------+-----------+-----------+---------+--------+-----------+--------+------------+---------------+ *Default - default on-line compiler *Supported - supported off-line compiler Total platforms: 1 Total permutations: 4 F:\github\mbed\workspace_tools>python build.py -m NUCLEO_F103RB -r ... F:\github\mbed\workspace_tools>cd .. F:\github\mbed>cd build F:\github\mbed\build>tree 文件夹 PATH 列表 卷序列号为 00000200 C8D9:AEA6 F:. ├─mbed │ ├─.temp │ │ └─TARGET_NUCLEO_F103RB │ │ ├─TOOLCHAIN_ARM_MICRO │ │ │ └─TARGET_STM │ │ │ └─TARGET_NUCLEO_F103RB │ │ │ └─TOOLCHAIN_ARM_MICRO │ │ ├─TOOLCHAIN_ARM_STD │ │ │ └─TARGET_STM │ │ │ └─TARGET_NUCLEO_F103RB │ │ │ └─TOOLCHAIN_ARM_STD │ │ ├─TOOLCHAIN_GCC_ARM │ │ │ └─TARGET_STM │ │ │ └─TARGET_NUCLEO_F103RB │ │ │ └─TOOLCHAIN_GCC_ARM │ │ └─TOOLCHAIN_IAR │ │ ├─TARGET_STM │ │ │ └─TARGET_NUCLEO_F103RB │ │ │ └─TOOLCHAIN_IAR │ │ └─TOOLCHAIN_IAR │ └─TARGET_NUCLEO_F103RB │ ├─TARGET_STM │ │ └─TARGET_NUCLEO_F103RB │ ├─TOOLCHAIN_ARM_MICRO │ ├─TOOLCHAIN_ARM_STD │ ├─TOOLCHAIN_GCC_ARM │ └─TOOLCHAIN_IAR └─rtos ├─.temp │ └─TARGET_NUCLEO_F103RB │ ├─TOOLCHAIN_ARM_MICRO │ │ └─TARGET_CORTEX_M │ │ └─TARGET_M3 │ │ └─TOOLCHAIN_ARM │ └─TOOLCHAIN_ARM_STD │ └─TARGET_CORTEX_M │ └─TARGET_M3 │ └─TOOLCHAIN_ARM ├─TARGET_CORTEX_M └─TARGET_NUCLEO_F103RB ├─TOOLCHAIN_ARM_MICRO └─TOOLCHAIN_ARM_STD F:\github\mbed\build>
building完成后

project.py script
创建测试用例用于离线IDE
F:\github\mbed\workspace_tools>python project.py -L [ 0] MBED_A1: Basic [ 1] MBED_A2: Semihost file system [ 2] MBED_A3: C++ STL [ 3] MBED_A4: I2C TMP102 [ 4] MBED_A5: DigitalIn DigitalOut [ 5] MBED_A6: DigitalInOut [ 6] MBED_A7: InterruptIn [ 7] MBED_A8: Analog [ 8] MBED_A9: Serial Echo at 115200 [ 9] MBED_A10: PortOut PortIn [ 10] MBED_A11: PortInOut [ 11] MBED_A12: SD File System [ 12] MBED_A13: I2C MMA7660 accelerometer [ 13] MBED_A14: I2C Master [ 14] MBED_A15: I2C Slave [ 15] MBED_A16: SPI Master [ 16] MBED_A17: SPI Slave [ 17] MBED_A18: Interrupt vector relocation [ 18] MBED_A19: I2C EEPROM read/write test [ 19] MBED_A20: I2C master/slave test [ 20] MBED_A21: Call function before main (mbed_main) [ 21] MBED_A22: SPIFI for LPC4088 (test 1) [ 22] MBED_A23: SPIFI for LPC4088 (test 2) [ 23] MBED_A24: Serial echo with RTS/CTS flow control [ 24] MBED_A25: I2C EEPROM line read/write test [ 25] MBED_A26: AnalogIn potentiometer test [ 26] MBED_A27: CAN loopback test [ 27] MBED_BLINKY: Blinky [ 28] MBED_BUS: Blinky BUS [ 29] MBED_BUSOUT: BusOut [ 30] BENCHMARK_1: Size (c environment) [ 31] BENCHMARK_2: Size (float math) [ 32] BENCHMARK_3: Size (printf) [ 33] BENCHMARK_4: Size (mbed libs) [ 34] BENCHMARK_5: Size (all) [ 35] PERF_1: SD Stdio R/W Speed [ 36] PERF_2: SD FileHandle R/W Speed [ 37] PERF_3: SD FatFS R/W Speed [ 38] MBED_1: I2C SRF08 [ 39] MBED_2: stdio [ 40] MBED_3: PortOut [ 41] MBED_4: Sleep [ 42] MBED_5: PWM [ 43] MBED_6: SW Reset [ 44] MBED_7: stdio benchmark [ 45] MBED_8: SPI [ 46] MBED_9: Sleep Timeout [ 47] MBED_10: Hello World [ 48] MBED_11: Ticker Int [ 49] MBED_12: C++ [ 50] MBED_13: Heap & Stack [ 51] MBED_14: Serial Interrupt [ 52] MBED_15: RPC [ 53] MBED_16: RTC [ 54] MBED_17: Serial Interrupt 2 [ 55] MBED_18: Local FS Directory [ 56] MBED_19: SD FS Directory [ 57] MBED_20: InterruptIn 2 [ 58] MBED_21: freopen Stream [ 59] MBED_22: Semihost [ 60] MBED_23: Ticker Int us [ 61] MBED_24: Timeout Int us [ 62] MBED_25: Time us [ 63] MBED_26: Integer constant division [ 64] MBED_27: SPI ADXL345 [ 65] MBED_28: Interrupt chaining (InterruptManager) [ 66] MBED_29: CAN network test [ 67] MBED_30: CAN network test using interrupts [ 68] MBED_31: PWM LED test [ 69] MBED_32: Pin toggling [ 70] MBED_33: C string operations [ 71] MBED_34: Ticker Two callbacks [ 72] MBED_35: SPI C12832 display [ 73] MBED_36: WFI correct behavior [ 74] MBED_37: Serial NC RX [ 75] MBED_38: Serial NC TX [ 76] CMSIS_RTOS_1: Basic [ 77] CMSIS_RTOS_2: Mutex [ 78] CMSIS_RTOS_3: Semaphore [ 79] CMSIS_RTOS_4: Signals [ 80] CMSIS_RTOS_5: Queue [ 81] CMSIS_RTOS_6: Mail [ 82] CMSIS_RTOS_7: Timer [ 83] CMSIS_RTOS_8: ISR [ 84] RTOS_1: Basic thread [ 85] RTOS_2: Mutex resource lock [ 86] RTOS_3: Semaphore resource lock [ 87] RTOS_4: Signals messaging [ 88] RTOS_5: Queue messaging [ 89] RTOS_6: Mail messaging [ 90] RTOS_7: Timer [ 91] RTOS_8: ISR (Queue) [ 92] RTOS_9: SD File write-read [ 93] NET_1: TCP client hello world [ 94] NET_2: NIST Internet Time Service [ 95] NET_3: TCP echo server [ 96] NET_4: TCP echo client [ 97] NET_5: UDP echo server [ 98] NET_6: UDP echo client [ 99] NET_7: HTTP client hello world [100] NET_8: NTP client [101] NET_9: Multicast Send [102] NET_10: Multicast Receive [103] NET_11: Broadcast Send [104] NET_12: Broadcast Receive [105] NET_13: TCP client echo loop [106] NET_14: UDP PHY/Data link layer [107] UB_1: u-blox USB modem: HTTP client [108] UB_2: u-blox USB modem: SMS test [109] USB_1: Mouse [110] USB_2: Keyboard [111] USB_3: Mouse_Keyboard [112] USB_4: Serial Port [113] USB_5: Generic HID [114] USB_6: MIDI [115] USB_7: AUDIO [116] CMSIS_DSP_1: FIR [117] DSP_1: FIR [118] KL25Z_1: LPTMR [119] KL25Z_2: PIT [120] KL25Z_3: TSI Touch Sensor [121] KL25Z_4: RTC [122] KL25Z_5: MMA8451Q accelerometer [123] EXAMPLE_1: /dev/null [124] EXAMPLE_2: FS + RTOS [125] UT_1: Basic [126] UT_2: Semihost file system [127] UT_3: General tests [128] UT_BUSIO: BusIn BusOut [129] UT_I2C_EEPROM_ASYNCH: I2C Asynch eeprom [130] UT_SERIAL_ASYNCH: Asynch serial test (req 2 serial peripherals) [131] UT_SPI_ASYNCH: Asynch spi test [132] UT_LP_TICKER: Low power ticker test [133] DTCT_1: Simple detect test F:\github\mbed\workspace_tools> F:\github\mbed\workspace_tools>python project.py -m NUCLEO_F103RB -i iar -p 45 ... Copy: Ticker.cpp Copy: Timeout.cpp Copy: Timer.cpp Copy: TimerEvent.cpp Copy: stm32f10x.icf Copy: main.cpp Successful exports: * NUCLEO_F103RB::iar F:\github\mbed\build\export\MBED_10_iar_NUCLEO_F103RB.zi p F:\github\mbed\build\export>tree 文件夹 PATH 列表 卷序列号为 00000200 C8D9:AEA6 F:. └─MBED_A1 ├─env └─mbed ├─api ├─common ├─hal └─targets ├─cmsis │ ├─TARGET_STM │ │ └─TARGET_NUCLEO_F103RB │ │ └─TOOLCHAIN_IAR │ └─TOOLCHAIN_IAR └─hal └─TARGET_STM └─TARGET_NUCLEO_F103RB
PS
building过程中所犯的低级错误。。。