Android 振动器解析
振动器负责控制引动电话的振动功能,Android中的振动器系统是一个专供这方面功能的小系统,提供根据时间振动的功能。
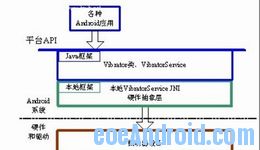
振动器系统包含了驱动程序、硬件抽象层、JNI部分、Java框架类等几个部分,也向Java应用程序层提供了简单的API作为平台接口。
Android振动器系统的基本层次结构如图所示。
振动器部分的结构
Android振动器系统自下而上包含了驱动程序、振动器系统硬件抽象层、振动器系统Java框架类、Java框架中振动器系统使用等几个部分,其结构如图所示。
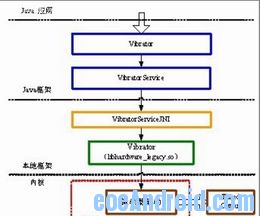
自下而上,Android的振动器系统分成了以下部分。
(1)驱动程序:特定硬件平台振动器的驱动程序,通常基于Android的Timed Output驱动框架实现
(2)硬件抽象层
光系统硬件抽象层接口路径为:hardware/libhardware_legacy/include/hardware_legacy/ vibrator.h
振动器系统的硬件抽象层在Android中已经具有默认实现,代码路径:
hardware/libhardware_legacy/vibrator/vibrator.c
振动器的硬件抽象层通常并不需要重新实现,是libhardware_legacy.so的一部分。
(3)JNI部分
代码路径:frameworks/base/services/jni/com_android_server_VibratorService.cpp
这个类是振动器的JNI部分,通过调用硬件抽象层向上层提供接口。
(4)Java部分
代码路径:
frameworks/base/services/java/com/android/server/VibratorService.java
frameworks/base/core/java/android/os/Vibrator.java
VibratorService.java通过调用,VibratorService JNI来实现com.android.server包中的VibratorService类。这个类不是平台的API,被Android系统Java框架中的一小部分调用。
Vibrator.java文件实现了android.os包中的Vibrator类,这是向Java层提供的API。
移植内容
针对特定的硬件平台,振动器系统的移植有两种方法。
第一种方法(通常情况):由于已经具有硬件抽象层,振动器系统的移植只需要实现驱动程序即可。这个驱动程序需要基于Android内核中的Timed Output驱动框架。
第二种方法:根据自己实现的驱动程序,重新实现振动器的硬件抽象层定义接口(需要在libhardware_legacy.so库中),由于振动器硬件抽象层的接口非常简单,因此这种实现方式也不会很复杂。
驱动程序
Vibrator的驱动程序只需要实现振动的接口即可,这是一个输出设备,需要接受振动时间作为参数。由于比较简单,因此Vibrator的驱动程序可以使用多种方式来实现。
在Android中,推荐基于Android内核定义Timed Output驱动程序框架来实现Vibrator的驱动程序。
Timed Output的含义为定时输出,用于定时发出某个输出。实际上,这种驱动程序依然是基于sys文件系统来完成的。
drivers/staging/android/目录timed_output.h中定义timed_output_dev结构体,其中包含enable和get_time这两个函数指针,实现结构体后,使用timed_output_dev_register()和timed_output_dev_unregister()函数注册和注销即可。
Timed Output驱动程序框架将为每个设备在/sys/class/timed_output/目录中建立一个子目录,设备子目录中的enable文件就是设备的控制文件。读enable文件表示获得剩余时间,写这个文件表示根据时间振动。
Timed Output驱动的设备调试,通过sys文件系统即可。
对于Vibrator设备,其实现的Timed Output驱动程序的名称应该为“vibrator”。因此Vibrator设备在sys文件系统中的方法如下所示:
Java代码:
# echo "10000" > /sys/class/timed_output/vibrator/enable
# cat /sys/class/timed_output/vibrator/enable
3290
# echo "0" > /sys/class/timed_output/vibrator/enable
复制代码 对于enable文件,“写”表示使能指定的时间,“读”表示获取剩余时间。
硬件抽象层的内容
1.硬件抽象层的接口
Vibrator硬件抽象层的接口在hardware/libhardware_legacy/include/hardware_legacy/目录的vibrator.h文件中定义:
Java代码:
int vibrator_on(int timeout_ms); // 开始振动
int vibrator_off(); // 关闭振动
复制代码
vibrator.h文件中定义两个接口,分别表示振动和关闭,振动开始以毫秒(ms)作为时间单位。 提示:Timed Output类型驱动本身有获得剩余时间的能力(读enable文件),但是在Android Vibrator硬件抽象层以上的各层接口都没有使用这个功能。
2.标准硬件抽象层的实现
Vibrator硬件抽象层具有标准的实现,在hardware/libhardware_legacy/vibrator/目录的vibrator.c中。
其中实现的核心内容为sendit()函数,这个函数的内容如下所示:
Java代码:#define THE_DEVICE "/sys/class/timed_output/vibrator/enable"
static int sendit(int timeout_ms){
int nwr, ret, fd;
char value[20];
#ifdef QEMU_HARDWARE // 使用QEMU的情况
if (qemu_check()) {
return qemu_control_command( "vibrator:%d", timeout_ms );
}
#endif
fd = open(THE_DEVICE, O_RDWR); // 读取sys文件系统中的内容
nwr = sprintf(value, "%d\n", timeout_ms);
ret = write(fd, value, nwr);
close(fd);
return (ret == nwr) ? 0 : -1;
}
复制代码
sendit()函数负责根据时间“振动”:在真实的硬件中,通过sys文件系统的文件进行控制;如果是模拟器环境则通过QEMU发送命令。 vibrator_on()调用sendit()以时间作为参数,vibrator_on()调用sendit()以0作为参数。
上层的情况和注意事项
frameworks/base/services/jni/目录中的com_android_server_VibratorService.cpp文件是Vibrator硬件抽象层的调用者,它同时也向Java提供JNI支持。
其中,为JNI定义的方法列表如下所示:
Java代码:
static JNINativeMethod method_table[] = {
{ "vibratorOn", "(J)V", (void*)vibratorOn }, // 振动器开
{ "vibratorOff", "()V", (void*)vibratorOff } // 振动器关
};
int register_android_server_VibratorService(JNIEnv *env) {
return jniRegisterNativeMethods(env, "com/android/server/VibratorService",
method_table, NELEM(method_table));
}
//vibratorOn()和vibratorOff()这两个函数的实现分别如下所示:
static void vibratorOn(JNIEnv *env, jobject clazz, jlong timeout_ms){
vibrator_on(timeout_ms);
}
static void vibratorOff(JNIEnv *env, jobject clazz){
vibrator_off();
}
复制代码
frameworks/base/services/java/com/android/server/目录中的VibratorService.java通过调用VibratorService JNI来实现com.android.server包中的VibratorService类。 frameworks/base/core/java/android/os/目录中的Vibrator.java文件实现了android.os包中的Vibrator类。它通过调用vibrator的Java服务来实现(获得名称为vibrator的服务),配合同目录中的IVibratorService.aidl文件向应用程序层提供Vibrator的相关API。
MSM的mahimahi平台中Vibrator实现是基于Timed Output驱动程序框架的驱动程序,因此不需要再实现硬件抽象层。
Vibrator的驱动程序在内核的arch/arm/mach-msm/目录中的msm_vibrator.c文件中实现。
msm_vibrator.c中的核心实现是set_pmic_vibrator()函数,其实现内容如下所示:
Java代码:
static void set_pmic_vibrator(int on){
static struct msm_rpc_endpoint vib_endpoint; /* 定义RPC的端点 */
struct set_vib_on_off_req {
struct rpc_request_hdr hdr;
uint32_t data;
}
req;
if (!vib_endpoint) {
vib_endpoint = msm_rpc_connect(PM_LIBPROG, PM_LIBVERS, 0);
/* ...... 省略部分内容 */
}
if (on)
req.data = cpu_to_be32(PMIC_VIBRATOR_LEVEL); /* 得到请求时间 */
else
req.data = cpu_to_be32(0);
msm_rpc_call(vib_endpoint, HTC_PROCEDURE_SET_VIB_ON_OFF, &req,
sizeof(req), 5 * HZ); /* 进行RPC调用 */
}
复制代码
set_pmic_vibrator()函数通过MSM系统的远程过程调用(RPC)实现了具体的功能,调用的指令由HTC_PROCEDURE_SET_VIB_ON_OFF指定。
这个驱动程序的初始化过程如下所示:
Java代码:
void __init msm_init_pmic_vibrator(void){
INIT_WORK(&vibrator_work, update_vibrator); /* 建立消息队列 */
spin_lock_init(&vibe_lock);
vibe_state = 0;
hrtimer_init(&vibe_timer, CLOCK_MONOTONIC, HRTIMER_MODE_REL); /* 定时器 */
vibe_timer.function = vibrator_timer_func;
timed_output_dev_register(&pmic_vibrator); /* 注册timed_output_dev设备 */
}
复制代码
vibrator_work为work_struct类型,在队列的执行函数update_vibrator中,调用set_pmic_vibrator()函数。 pmic_vibrator是一个timed_output_dev类型的设备。其enable函数指针的实现vibrator_enable根据输入的数值开始定时器,并通过向调度队列进行输出操作。get_time函数指针的实现vibrator_get_time则只是从定时器中获取剩余时间。
这里之所以使用定时器加队列的方式,是因为enable的调用将形成一个持续时间的效果,但是调用本身不宜阻塞,因此实现就让vibrator_enable函数退出后,通过定时器实现效果。
振动器系统包含了驱动程序、硬件抽象层、JNI部分、Java框架类等几个部分,也向Java应用程序层提供了简单的API作为平台接口。
Android振动器系统的基本层次结构如图所示。
振动器部分的结构
Android振动器系统自下而上包含了驱动程序、振动器系统硬件抽象层、振动器系统Java框架类、Java框架中振动器系统使用等几个部分,其结构如图所示。
自下而上,Android的振动器系统分成了以下部分。
(1)驱动程序:特定硬件平台振动器的驱动程序,通常基于Android的Timed Output驱动框架实现
(2)硬件抽象层
光系统硬件抽象层接口路径为:hardware/libhardware_legacy/include/hardware_legacy/ vibrator.h
振动器系统的硬件抽象层在Android中已经具有默认实现,代码路径:
hardware/libhardware_legacy/vibrator/vibrator.c
振动器的硬件抽象层通常并不需要重新实现,是libhardware_legacy.so的一部分。
(3)JNI部分
代码路径:frameworks/base/services/jni/com_android_server_VibratorService.cpp
这个类是振动器的JNI部分,通过调用硬件抽象层向上层提供接口。
(4)Java部分
代码路径:
frameworks/base/services/java/com/android/server/VibratorService.java
frameworks/base/core/java/android/os/Vibrator.java
VibratorService.java通过调用,VibratorService JNI来实现com.android.server包中的VibratorService类。这个类不是平台的API,被Android系统Java框架中的一小部分调用。
Vibrator.java文件实现了android.os包中的Vibrator类,这是向Java层提供的API。
移植内容
针对特定的硬件平台,振动器系统的移植有两种方法。
第一种方法(通常情况):由于已经具有硬件抽象层,振动器系统的移植只需要实现驱动程序即可。这个驱动程序需要基于Android内核中的Timed Output驱动框架。
第二种方法:根据自己实现的驱动程序,重新实现振动器的硬件抽象层定义接口(需要在libhardware_legacy.so库中),由于振动器硬件抽象层的接口非常简单,因此这种实现方式也不会很复杂。
驱动程序
Vibrator的驱动程序只需要实现振动的接口即可,这是一个输出设备,需要接受振动时间作为参数。由于比较简单,因此Vibrator的驱动程序可以使用多种方式来实现。
在Android中,推荐基于Android内核定义Timed Output驱动程序框架来实现Vibrator的驱动程序。
Timed Output的含义为定时输出,用于定时发出某个输出。实际上,这种驱动程序依然是基于sys文件系统来完成的。
drivers/staging/android/目录timed_output.h中定义timed_output_dev结构体,其中包含enable和get_time这两个函数指针,实现结构体后,使用timed_output_dev_register()和timed_output_dev_unregister()函数注册和注销即可。
Timed Output驱动程序框架将为每个设备在/sys/class/timed_output/目录中建立一个子目录,设备子目录中的enable文件就是设备的控制文件。读enable文件表示获得剩余时间,写这个文件表示根据时间振动。
Timed Output驱动的设备调试,通过sys文件系统即可。
对于Vibrator设备,其实现的Timed Output驱动程序的名称应该为“vibrator”。因此Vibrator设备在sys文件系统中的方法如下所示:
Java代码:
# echo "10000" > /sys/class/timed_output/vibrator/enable
# cat /sys/class/timed_output/vibrator/enable
3290
# echo "0" > /sys/class/timed_output/vibrator/enable
复制代码 对于enable文件,“写”表示使能指定的时间,“读”表示获取剩余时间。
硬件抽象层的内容
1.硬件抽象层的接口
Vibrator硬件抽象层的接口在hardware/libhardware_legacy/include/hardware_legacy/目录的vibrator.h文件中定义:
Java代码:
int vibrator_on(int timeout_ms); // 开始振动
int vibrator_off(); // 关闭振动
复制代码
vibrator.h文件中定义两个接口,分别表示振动和关闭,振动开始以毫秒(ms)作为时间单位。 提示:Timed Output类型驱动本身有获得剩余时间的能力(读enable文件),但是在Android Vibrator硬件抽象层以上的各层接口都没有使用这个功能。
2.标准硬件抽象层的实现
Vibrator硬件抽象层具有标准的实现,在hardware/libhardware_legacy/vibrator/目录的vibrator.c中。
其中实现的核心内容为sendit()函数,这个函数的内容如下所示:
Java代码:#define THE_DEVICE "/sys/class/timed_output/vibrator/enable"
static int sendit(int timeout_ms){
int nwr, ret, fd;
char value[20];
#ifdef QEMU_HARDWARE // 使用QEMU的情况
if (qemu_check()) {
return qemu_control_command( "vibrator:%d", timeout_ms );
}
#endif
fd = open(THE_DEVICE, O_RDWR); // 读取sys文件系统中的内容
nwr = sprintf(value, "%d\n", timeout_ms);
ret = write(fd, value, nwr);
close(fd);
return (ret == nwr) ? 0 : -1;
}
复制代码
sendit()函数负责根据时间“振动”:在真实的硬件中,通过sys文件系统的文件进行控制;如果是模拟器环境则通过QEMU发送命令。 vibrator_on()调用sendit()以时间作为参数,vibrator_on()调用sendit()以0作为参数。
上层的情况和注意事项
frameworks/base/services/jni/目录中的com_android_server_VibratorService.cpp文件是Vibrator硬件抽象层的调用者,它同时也向Java提供JNI支持。
其中,为JNI定义的方法列表如下所示:
Java代码:
static JNINativeMethod method_table[] = {
{ "vibratorOn", "(J)V", (void*)vibratorOn }, // 振动器开
{ "vibratorOff", "()V", (void*)vibratorOff } // 振动器关
};
int register_android_server_VibratorService(JNIEnv *env) {
return jniRegisterNativeMethods(env, "com/android/server/VibratorService",
method_table, NELEM(method_table));
}
//vibratorOn()和vibratorOff()这两个函数的实现分别如下所示:
static void vibratorOn(JNIEnv *env, jobject clazz, jlong timeout_ms){
vibrator_on(timeout_ms);
}
static void vibratorOff(JNIEnv *env, jobject clazz){
vibrator_off();
}
复制代码
frameworks/base/services/java/com/android/server/目录中的VibratorService.java通过调用VibratorService JNI来实现com.android.server包中的VibratorService类。 frameworks/base/core/java/android/os/目录中的Vibrator.java文件实现了android.os包中的Vibrator类。它通过调用vibrator的Java服务来实现(获得名称为vibrator的服务),配合同目录中的IVibratorService.aidl文件向应用程序层提供Vibrator的相关API。
MSM的mahimahi平台中Vibrator实现是基于Timed Output驱动程序框架的驱动程序,因此不需要再实现硬件抽象层。
Vibrator的驱动程序在内核的arch/arm/mach-msm/目录中的msm_vibrator.c文件中实现。
msm_vibrator.c中的核心实现是set_pmic_vibrator()函数,其实现内容如下所示:
Java代码:
static void set_pmic_vibrator(int on){
static struct msm_rpc_endpoint vib_endpoint; /* 定义RPC的端点 */
struct set_vib_on_off_req {
struct rpc_request_hdr hdr;
uint32_t data;
}
req;
if (!vib_endpoint) {
vib_endpoint = msm_rpc_connect(PM_LIBPROG, PM_LIBVERS, 0);
/* ...... 省略部分内容 */
}
if (on)
req.data = cpu_to_be32(PMIC_VIBRATOR_LEVEL); /* 得到请求时间 */
else
req.data = cpu_to_be32(0);
msm_rpc_call(vib_endpoint, HTC_PROCEDURE_SET_VIB_ON_OFF, &req,
sizeof(req), 5 * HZ); /* 进行RPC调用 */
}
复制代码
set_pmic_vibrator()函数通过MSM系统的远程过程调用(RPC)实现了具体的功能,调用的指令由HTC_PROCEDURE_SET_VIB_ON_OFF指定。
这个驱动程序的初始化过程如下所示:
Java代码:
void __init msm_init_pmic_vibrator(void){
INIT_WORK(&vibrator_work, update_vibrator); /* 建立消息队列 */
spin_lock_init(&vibe_lock);
vibe_state = 0;
hrtimer_init(&vibe_timer, CLOCK_MONOTONIC, HRTIMER_MODE_REL); /* 定时器 */
vibe_timer.function = vibrator_timer_func;
timed_output_dev_register(&pmic_vibrator); /* 注册timed_output_dev设备 */
}
复制代码
vibrator_work为work_struct类型,在队列的执行函数update_vibrator中,调用set_pmic_vibrator()函数。 pmic_vibrator是一个timed_output_dev类型的设备。其enable函数指针的实现vibrator_enable根据输入的数值开始定时器,并通过向调度队列进行输出操作。get_time函数指针的实现vibrator_get_time则只是从定时器中获取剩余时间。
这里之所以使用定时器加队列的方式,是因为enable的调用将形成一个持续时间的效果,但是调用本身不宜阻塞,因此实现就让vibrator_enable函数退出后,通过定时器实现效果。