【算法】最短路径之A*搜索
最短路径之A*搜索
A*算法很久以前就知道,但一直没细究过。可能是因为一直没遇到要找最短路径的场景,没迫切需求吧。
1) 概述
A*搜索(A* search),是启发式搜索(Heuristic)的一种。
首先,搜索是在一个静态节点网络中进行的,例如地图网格,目标则是找到节点间最短路径。而如何更快的找到这条路径,就是A*算法所解决的。当然,不同场景,其他算法可能更好。
而启发式搜索呢,是指优先顺着具有启发性的节点搜索。也就是猜测那些节点可能是到达目标最好的,先进行搜索,称之为最好优先(Best-first)。
既然是要猜测节点是否最优,自然要有一个评估函数,或称为启发式函数,可记为h(n)。
好,到这里的话,可以先给出A*计算每个节点的代价公式了:
f(n) = g(n) + h(n)
这个g(n),则是当前节点到起始节点的确切最小代价。假设下面这张图:

以及另外两个条件:
- 节点为8-邻域的,即绿色节点周围1-8都是相邻可达的。4-邻域的话,就只有2,4,6,8是相邻可达的。(就是能否斜着走)
- 节点到上下左右(2,4,6,8)代价为10,到对角线节点(1,3,5,7)为14。(1与根号2,用整数替代了)
那么,A到起始绿点的g(n)就为14+10=28。也就是走3A或4A。至于A到目标点的h(n),则得根据你的评估函数算出来。
A*中h(n)一般采用以下几种空间几何度量,如果假设有(x1,y1)与(x2,y2)两点,那么:
- 曼哈顿距离(Manhattan distance): |x1-x2| + |y1-y2|
- 欧氏距离(Euclidean distance): sqrt( (x1-x2)2 + (y1-y2)2 )
- 切比雪夫距离(Chebyshev distance): max( |x1-x2|, |y1-y2| )
这里如果把h(n)常等于0的话,就是单源最短路径问题了,即Dijkstra算法。就是四散往外找,不做启发式搜索。
2) 原理
“A* Pathfinding for Beginners”讲述的非常清晰,也是Wiki上的外部链接之一。
“A星(A*, A Star)算法详解”是其中文翻译版。
这儿就简单点描述其过程了:
- 创建一个OPEN列表,并把起始节点加入。
- OPEN列表是用来存储待处理节点的,随着搜索进行会不断增多。
- 每次下一步搜索时,会从中检查选取f(n)最小的节点,优先进行搜索。(即步骤3)
- 创建一个CLOSE列表,为空。
- CLOSE列表是用来保存OPEN列表每次检查过的节点,以便不再检查。
- 从OPEN列表中选取f(n)最小的节点,并把它移入CLOSE列表。
- 检查当前节点周围8-邻域节点:
- 如果不可通过(障碍物)或者已在CLOSE列表(已检查),略过。不然:
- 当它不在OPEN列表时,添加进去。并把当前节点作为父节点。计算其f(n),g(n)与h(n)。
- 当它已在OPEN列表时,计算新g(n)并与其原g(n)比较,检查是否更好。如果更好的话,则把父节点改为当前节点。h(n)不会变啦,f(n)得重新求下和。
- 检查若遇到目标节点时,路径被找到。不然重复步骤3,直至OPEN列表为空,即未找到路径。
另外,上述文章内,还提及了很多实现时的注意点。其中值得注意的一点是:二叉堆维护OPEN列表,获取最小节点更快。
3) 运用
也就是实现,现有的库有:
- JS,PathFinding.js。其还提供了个可视化页面。
- C++,BGL(Boost Graph Library)也提供了astar_search。
当然,自己实现一遍也是不错的,算是认真学习过了^^。
这儿,我以自己的实现举例。
首先实现语言是C++,参考的是PathFinding.js。二叉堆用的是boost.heap,它提供了以下几种优先队列的实现:
- priority_queue: 优先队列,stl heap的封装,多增加了些模板选项。
- binomial_heap: 二项堆,类似二叉堆,但其支持更快得合并操作。
- fibonacci_heap: 斐波那契堆,比二项堆效率更高。但其结构复杂,常数因子较大。
- pairing_heap: Pairing堆,效率接近斐波那契堆,同时实现简单。
- d_ary_heap: d叉堆,二叉堆的泛化。其拥有d个子节点而非两个。
- skew_heap: 斜堆,左偏树的自调节形式,是具有堆序的二叉树。
比较后,我选择了pairing_heap。
这儿直接上代码段,来回顾下上面提及的过程。
AStarFinder::pnode_vector_t
AStarFinder::FindPath(
size_type start_x, size_type start_y,
size_type end_x, size_type end_y,
const grid_t &grid) const {
// 从节点网络中拿到起始和目标节点
pnode_t pstart_node = grid.GetNodeAt(start_x, start_y),
pend_node = grid.GetNodeAt(end_x, end_y);
// 额外找邻节点时的选项
bool allow_diagonal = op_->allow_diagonal, // 是否允许对角线,4还是8邻域
dont_cross_corners = op_->dont_cross_corners; // 是否允许跨越障碍物边角
// 步骤1:准备OPEN列表。这儿是pairing_heap。
node_t::heap_t open_list;
// 同时加入起始节点
// push the start node into the open list
pstart_node->opened = true;
pstart_node->handle = open_list.push(pstart_node);
// 步骤2的话,这里用节点状态opened与closed来区分,所以不必了。
pnode_t pnode;
size_type x = 0, y = 0;
int ng = 0;
// 步骤5,所提及的不断重复,直到OPEN列表为空。
// while the open list is not empty
while (!open_list.empty()) {
// 步骤3:选取f(n)最小的节点,设置closed状态。
// 排序由堆来维护了,只需要pop顶部的节点就行了。
// pop the position of node which has the minimum `f` value.
pnode = open_list.top();
open_list.pop();
pnode->closed = true;
// 步骤5,所提及的遇到目标节点,返回节点路径。
// 节点路径,只需从目标节点不断回溯父节点就行了。
// if reached the end position, construct the path and return it
if (pnode == pend_node) {
return Backtrace<grid_t>(pend_node);
}
// 步骤4:查看当前节点的邻节点。
// get neigbours of the current node
pnode_vector_t neighbors = grid.GetNeighbors(
pnode, allow_diagonal, dont_cross_corners);
BOOST_FOREACH(pnode_t &neighbor, *neighbors) {
// 关闭的,略去
if (neighbor->closed) {
continue;
}
x = neighbor->x;
y = neighbor->y;
// 计算相对于当前节点,此邻节点的g(n)
// get the distance between current node and the neighbor
// and calculate the next g score
ng = pnode->g + ((x - pnode->x == 0 || y - pnode->y == 0) ? 10 : 14);
// 如果此邻节点没检查过,或者检查过了但新g(n)更好
// check if the neighbor has not been inspected yet, or
// can be reached with smaller cost from the current node
if (!neighbor->opened || ng < neighbor->g) {
// 重新赋下f(n),g(n)与h(n)值
neighbor->g = ng;
if (neighbor->h == 0) { // 还没计算过h(n)时才计算赋值
neighbor->h = op_->weight * op_->heuristic(10 * (x - end_x),
10 * (y - end_y));
}
neighbor->f = neighbor->g + neighbor->h;
// 重新赋下它的父节点
neighbor->parent = pnode;
if (!neighbor->opened) {
// 没检查过时,得加入OPEN列表。同时push会更新堆。
neighbor->opened = true;
neighbor->handle = open_list.push(neighbor);
} else {
// 检查过时,由于该邻节点f(n)变了,需要主动更新堆。
// the neighbor can be reached with smaller cost.
// Since its f value has been updated, we have to
// update its position in the open list
open_list.update(neighbor->handle);
}
} // end for each neighbor
} // end while not open list empty
}
// 没找到时,返回个空的。
// fail to find the path
return pnode_vector_t();
}
完整代码请见附1。
参考
- 几种堆(Bin,Fib,Pair)在Dijkstra算法上的效率试验
4) 结语
A*搜索的基本原理还是挺简单易懂的。但如果要深入学习应用的话,不可避免的,还需要了解其各种优化方式、不同场景变化,以及各类衍生变种。
不过呢,对于我目前来说,没这么大必要。也只是看看玩玩,到时要用到再说了。何况有这么多前人栽着树呢,对吧。
附1:样例工程PathFinder
Git:PathFinder。
目录树如下:
PathFinder/
├─benchmark/
├─build/
│ └─PathFinder-msvc.cbp # test/与boost astar_search例子工程
├─src/
│ ├─core/
│ └─finders/
├─test/
├─third_party/
│ └─boost_1_55_0/
├─tools/
└─visual/
└─VisualPathFinder/ # A*可视化Qt工程
A*运用仅需src下文件即可,且都是hpp。也就是includepath加上src/与boost_1_55_0/目录就可以了。
VisualPathFinder/下是Qt工程,A*简单的可视化,大概这个样子:
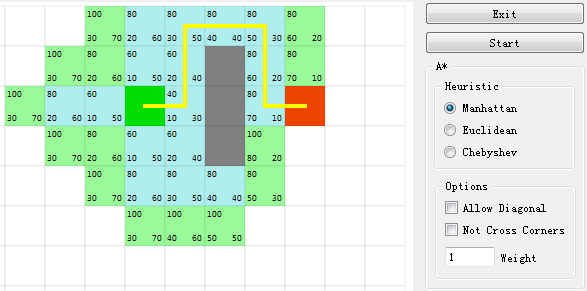
- 绿色、红色分别表示起始、目标节点。浅绿色表示opened,浅蓝色表示closed。
- 数值,左上角为F,左下角为G,右下角为H。
- 单击起始或目标节点后,再单击其他节点为交换。不然就是切换可不可通过。
然后,右侧有一些可选项目,其他没什么了。没单步,也没标识父节点方向。
原文下载:最短路径之AStar搜索.zip。