DM6446开发攻略的linux-2.6.18移植
TI DAVINCI
使用最新的内核是
montavista linux-2.6.18
,之前说过,国内很多公司,包括开发板的软件包,一直在使用
montavista linux-2.6.10
,这个版本准确来说是比较低的,实时性肯定没
2.6.18
好(
MontaVista Linux Professional Edition 5.0
以
linux-2.6.18
为基础,打破了
Linux
不适用于实时和嵌入式应用的迷思);使用
devfs
,没有使用
udev
;对
DM365
等新出的
DAVINCI
芯片支持限度很小;
ucLibc
支持(减少
75%
应用程序资源需求);
IPv6
(增加更多
Internet Protocol version 6 (IPv6)
支持,提供比旧版产品更优异的效能、安全和管理功能);等等,这些优点不得不让人心动。
第一步:简化
linux-2.6.18
如果你已经安装好
TI mvl_5_0_0_demo_lsp_setuplinux_02_00_00_140.bin
,先在你的工作目录下建立
linux-2.6.18_pro500
的目录,进入改目录,比如
/home/<useraccount>\ dm6446/linux-2.6.18_pro500/
,
COPY
内核源代码到本目录下,命令如下:
cp �Cr /opt/mv_pro_5.0.0/montavista\pro/devkit/lsp/ti-davinci/linux-2.6.18_pro500/*
.
(注意
”
*
” ”
.
”
之间的空格)
和
UBOOT
移植一样,我们先把一些不相关的平台给删除掉,进入
arch
目录,保留
arm
目录,其他全部删除掉。
进入
linux-2.6.18_pro500/arch/arm/
,保留
boot
,
common
,
configs
,
kernel
,
lib
,
mach-davinci
,
mm
,
nwfpe
,
oprofile
,
plat-mxc
,
plat-omap
,
tools
,
vfp
和其他
4
个文件
Kconfig,Makefile, Kconfig-nommu, Kconfig.debug
,其他有关
mach-xxxx
的全部删除掉。
删除
include
下不相关平台的文件夹:
asm-alpha
,
asm-arm26
,
asm-cris
,
asm-frv
,
asm-h8300
,
asm-i386
,
asm-ia64
,
asm-m32r
,
asm-m68k
,
asm-m68knommu
,
asm-mips
,
asm-parisc
,
asm-powerpc
,
asm-ppc
,
asm-ppc64
,
asm-s390
,
asm-sh
,
asm-sh64
,
asm-sparc
,
asm-sparc64
,
asm-um
,
asm-v850
,
asm-x86_64
,
asm-xtensa
全部删除掉,其他就不用删了,否则出问题。
第二步:建立交叉编译环境
进行下面工作之前,确保你的
GCC
已经按《
DAVINCI DM6446
开发攻略――环境搭建篇》建立好。
1、
顶层
Makefile
修改:
在
172
行,即
# make CROSS_COMPILE=ia64-linux-
下面,加入:
ARCH = arm
CROSS_COMPILE = arm_v5t_le-
把下面:
ARCH := $(shell if [ -f .mvl_target_cpu ]; then \
cat .mvl_target_cpu; \
else \
echo $(SUBARCH); \
fi)
CROSS_COMPILE = $(shell if [ -f .mvl_cross_compile ]; then \
cat .mvl_cross_compile; \
fi)
全部注释掉;
2、
COPY UBOOT
的
mkimage
工具
从编译好的
UBOOT
里
tool
目录下的
mkimage
工具
COPY
到
linux-2.6.18_pro500
目录以下,
3、
添加
mkzImage.sh
使用
vi
生成
mkzImage.sh
,把以下内容加入文件:
#!/bin/sh
./mkimage -n 'linux-2.6.18' -A arm -O linux -T kernel -C none -a 0x80008000 -e 0x80008040 -d zImage davinci_kernel.bin
chmod 777 davinci_kernel.bin
cp -f davinci_kernel.bin /tftpboot
保存在
linux-2.6.18_pro500/
目录下,配合
mkimage
,方便把
zImage
转换成
davinci_kernel.bin
,这样
UBOOT
才能把
linux kernel
给
BOOT
起来;
4、
修改
arch/arm/boot/Makefile
:
在
57
行下面加入:
@cp -f arch/arm/boot/zImage zImage
这样每次编译
zImage
,生成的
zImage
可以自动
COPY
到
linux-2.6.18_pro500
目录下。
5、
修改
fs/hostfs/Makefile
因为删除
um
和
asm-um
,当使用
make distclean
操作的时候会出现问题,所以把:
include arch/um/scripts/Makefile.rules
注释掉。
6、
修改
arch/arm/Kconfig
因为删除其他不相关的平台的文件夹,所以
Kconfig
也把这些平台给注释掉:
从
135
行开始一直到
343
行
#config ARCH_AAEC2000
# bool "Agilent AAEC-2000 based"
# select ARM_AMBA
# help
# This enables support for systems based on the Agilent AAEC-2000
。。。。。。。。。。。。。。。。。。。
#config ARCH_OMAP
# bool "TI OMAP"
# help
# Support for TI's OMAP platform (OMAP1 and OMAP2).
以上全部注释掉。
从第
355
行开始到
399
行,全部注释掉:
#source "arch/arm/mach-clps711x/Kconfig"
#source "arch/arm/mach-ep93xx/Kconfig"
。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
#source "arch/arm/mach-netx/Kconfig"
第三步:内核移植裁减
1、
在
linux-2.6.18_pro500
目录下,使用以下命令开始配置内核:
cp arch/arm/configs/ davinci_dm644x_defconfig .config
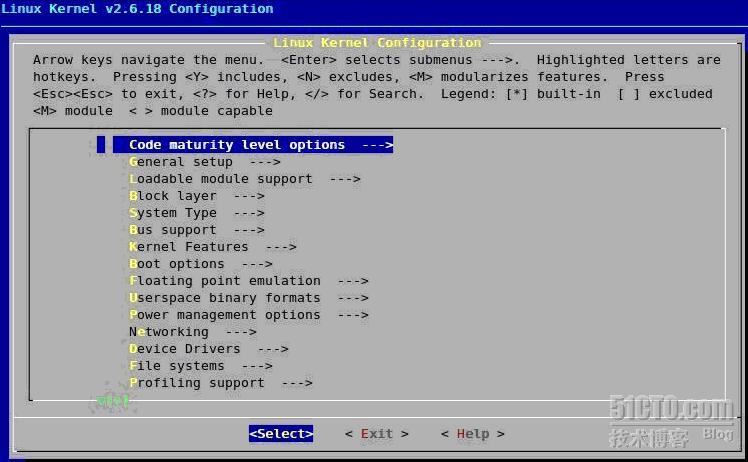
make menuconfig
进入熟悉的
kernel
配置界面:
2、
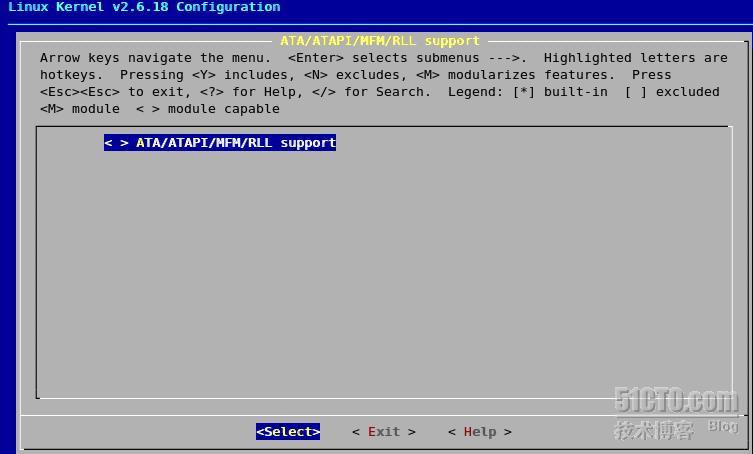
去掉
ATA DRIVER
由于本人的开发板没有
NOR FLASH
,也没有
ATA
硬盘之类的东西,这一点和
TI EVM
板不一样,所以我们先把设备驱动里的
ATA
选项去掉。
然后保存配置退出,使用
Make zImage
编译完后,运行
./mkzImage.sh
,可以
COPY
生成的
bin
文件到
/tftpboot
目录下,参照上篇有关
uboot
的帖子,使板子把
uboot
运行起来,使用进入
UBOOT
命令行:
U-Boot >tftp 80008000 davinci_kernel.bin
U-Boot >bootm 80008000
之后可以在串口终端看到内核的运行信息。
3、
修改
arch/arm/mach-davinc/board-evm.c
有关
dm644x
的平台信息就在
board-evm.c
里,包括
nand flash
分区配置,管脚复用配置,
psc
初始化等等。
在
74
行,把有关
nor flash
的代码全部注释掉,在
static struct platform_device *davinci_evm_devices[] __initdata = {
&serial_device,
#if defined(CONFIG_MTD) || defined(CONFIG_MTD_MODULE)
//&davinci_evm_flash_device,
#endif
#if defined(CONFIG_MTD_NAND_DAVINCI) || defined(CONFIG_MTD_NAND_DAVINCI_MODULE)
&davinci_nand_device,
#endif
&rtc_dev,
&davinci_fb_device,
#if defined(CONFIG_BLK_DEV_PALMCHIP_BK3710) || \
defined(CONFIG_BLK_DEV_PALMCHIP_BK3710_MODULE)
&davinci_ide_device,
#endif
#if defined(CONFIG_MMC_DAVINCI) || defined(CONFIG_MMC_DAVINCI_MODULE)
&mmc0_device,
#endif
};
把
nor flash
的设备驱动注释掉;
对
nand flash
进行分区,这个要和
UBOOT
烧写
UBOOT KERNEL ROOTFS
等烧写的地址一一对应;
static struct mtd_partition davinci_nand_partitions[] = {
/* bootloader (U-Boot, etc) in first sector */ /*Mtdblock0*/
{
.name = "bootloader",
.offset = 0,
.size = SZ_1M+SZ_512K,
.mask_flags = 0, /* force read-only */
},
/* bootloader params in the next sector */ /*Mtdblock1*/
{
.name = "dspcore",
.offset = SZ_1M+SZ_512K,
.size = (SZ_8M-SZ_2M-SZ_512K),
.mask_flags = 0, /* force read-only */
},
(
这里注明一下:
mtdblock1
源代码被定义为
128K
参数,但是在
UBOOT
里,我们把参数放在
0x0000
开始的地址,这里可以保留该分区,也可以不要。本人定义成
DSP BIN
文件存放的地方,有种调试方式可以不用
KERNEL
就可以在
UBOOT
把
DSP BOOT
起来,双核并行运行嘛。这个分区在本人这里是拿来测试DSP程序,一般不建议使用UBOOT方式把DSP给BOOT起来。这个
DSP BIN
就是通过
HEX64
工具生成的,这和
DM642
、
DM6437
的
BIN
文件完全一样。具体说,把
DSP
程序运行起来常用有四种方法,一是硬件
BOOT
方式选择
DSP BOOT
,二是通过
UBOOT
把
BIN
启动起来,三是通过内核把
BIN
启动起来,四是
DSP SERVER
方式,即
*.x64P
,
就是最常用的
Codec Engine
机制。第三种方式也有很多公司在用,然后通过共享内存方式、中断等实现双核通信。
)
/* kernel */ /*Mtdblock2*/
{
.name = "kernel",
.offset = (SZ_8M-SZ_1M),
.size = SZ_4M+SZ_1M,
.mask_flags = 0,
},
/* file system */ /*Mtdblock3*/
{
.name = "rootfs",
.offset = (SZ_8M+SZ_4M),
.size = SZ_64M,
.mask_flags = 0,
},
/* data */ /*Mtdblock4*/
这个可以保存一些备份数据,一可以不用定义
{
.name = "data",
.offset = (SZ_64M+SZ_8M+SZ_4M),
.size = (SZ_128M-(SZ_64M+SZ_8M+SZ_4M)),
.mask_flags = MTD_WRITEABLE,
}
};
以上是
NAND
分区信息,针对各自板子不同大小的
NAND FLASH
,合理分配空间。
#if 1
static struct platform_device rtc_dev = {
.name = "pcf8563",
.id = -1,
};
#else
static struct platform_device rtc_dev = {
.name = "rtc_davinci_evm",
.id = -1,
};
#endif
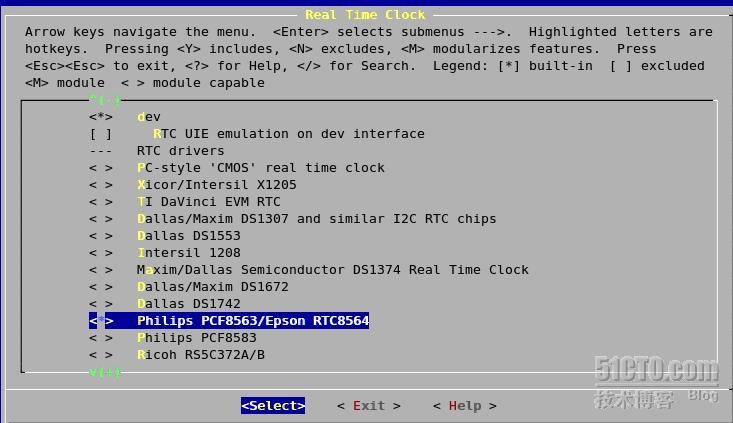
以上的代码修改,表示板子采用
pcf8563
时钟芯片作为
RTC
设备,本人的板子不采用
TI-EVM
的电路,所以要修改这里,同时在
drivers/rtc
目录下,修改
rtc-pcf8563.c
的一个
BUG
,就是:
static unsigned short normal_i2c[] = { 0x51, I2C_CLIENT_END };
一定要加
0x51
地址,否则内核运行时,无法注册
pcf8563
的驱动,会出现
RTC
错误信息,很多网友都碰都过这个问题。改完后,
make menuconfig
要选上
pcf8563
的驱动。
在
static void dm644x_setup_pinmux(unsigned int id)
里,把有关
FPGA
接口的管脚复用功能去掉,因为很多中低端
DM6446
产品都没有接
FPGA
芯片。这样我们可以把这些引脚定义成
SPI
核
UART
接口。
#if 0
case DAVINCI_LPSC_VLYNQ:
davinci_cfg_reg(DM644X_VLINQEN);
davinci_cfg_reg(DM644X_VLINQWD);
break;
#endif
同时在
arch/arm/mach-davinci/mux_cfg.c
里
struct pin_config __initdata_or_module davinci_dm644x_pins[] = {
/*
* description mux mode mode mux dbg
* reg offset mask mode
*/
#if 1 //ATA
功能不用
MUX_CFG("HDIREN", 0, 16, 1, 0, 1)
MUX_CFG("ATAEN", 0, 17, 1, 0, 1)
#else
MUX_CFG("HDIREN", 0, 16, 1, 1, 1)
MUX_CFG("ATAEN", 0, 17, 1, 1, 1)
#endif
MUX_CFG("MSTK", 1, 9, 1, 0, 0)
MUX_CFG("I2C", 1, 7, 1, 1, 0)
MUX_CFG("MCBSP", 1, 10, 1, 1, 0)
MUX_CFG("PWM0", 1, 4, 1, 1, 0)
MUX_CFG("PWM1", 1, 5, 1, 1, 0)
MUX_CFG("PWM2", 1, 6, 1, 1, 0)
#if 0
MUX_CFG("VLINQEN", 0, 15, 1, 1, 0)
MUX_CFG("VLINQWD", 0, 12, 3, 3, 0)
#endif
MUX_CFG("EMACEN", 0, 31, 1, 1, 1)
MUX_CFG("GPIO3V", 0, 31, 1, 0, 1)
MUX_CFG("GPIO0", 0, 24, 1, 0, 1)
MUX_CFG("GPIO3", 0, 25, 1, 0, 0)
MUX_CFG("GPIO43_44", 1, 7, 1, 0, 0)
MUX_CFG("GPIO46_47", 0, 22, 1, 0, 1)
MUX_CFG("RGB666", 0, 22, 1, 1, 1)
/*MUX_CFG("RGB888", 0, 23, 1, 1, 1)*/ /* for vpbe rgb888*/
MUX_CFG("LOEEN", 0, 24, 1, 1, 1)
MUX_CFG("LFLDEN", 0, 25, 1, 1, 0)
};
4、
内核进一步配置
对内核进一步配置之前,如果对
linux-2.6.18
很陌生,这里给出一个链接:
http://blog.chinaunix.net/u2/71415/showart_1018029.html
一个网友对
“
Linux 2.6.19.x
内核编译配置
“进行详细的描述,不妨去看一下。
使用
cp arch/arm/configs/ davinci_dm644x_defconfig .config
make menuconfig
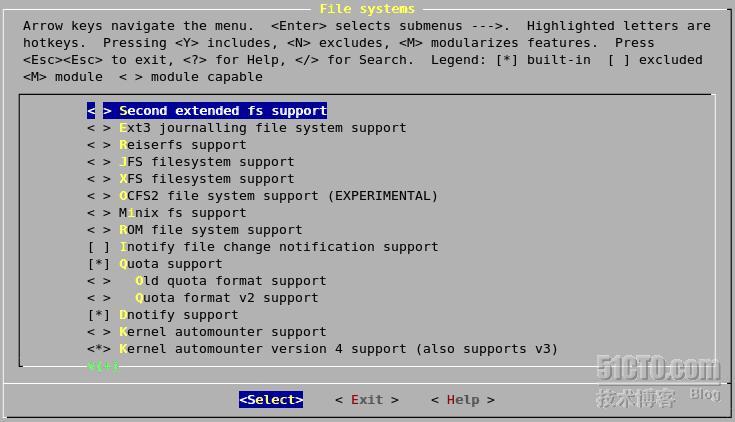
进入内核配置界面,在这里,本人只对要修改的地方进行分析,其他设置,保留
davinci_dm644x_defconfig
。上面已经介绍有关去掉
ATA
和
TI-EVM RTC
设备,接着我们对文件系统进行裁减,如下图。图下半部没有显示,保留
davinci_dm644x_defconfig
就可以了,一般不要修改。NFS文件系统的配置也用默认的,直接编译就可以了。
其他功能和驱动,建议保留默认配置。对于自己板子新的设备(和
TI-EVM
板差别很大),则要做更复杂的移植工作,包括相应目录的
makefile
和
Kconfig
文件的修改等,这里不再累赘。
第四步:保存备份修改后的配置
内核移植配置,一定要养成备份配置文件的良好习惯,一步一个脚印,防止做重复工作。幸好
davinci_dm644x_defconfig
给大家提供一个很好的参考,否则更加麻烦。直接从内核网站下载最新内核来移植,那是非常大的挑战,不是一般人为的。
Linux-2.6.18
也许有很多设备没有支持,但在较新的
linux
内核上有,这也可以把新的驱动移植下来,这个工作量也不小,当然也有简单的
patch
,那是后话。
按照上篇UBOOT的介绍,设置好参数,比如使用NFS:
mem=120M console=ttyS0,115200n8 noinitrd rw ip=dhcp root=/dev/nfs nfsroot=192.168.1.251:/home/<useraccount>/nfs/tirootfs,nolock
测试内核和NFS文件系统。
本文出自 “ 集成系统-人生观” 博客,请务必保留此出处 http://zjbintsystem.blog.51cto.com/964211/284468