3D图形学(一)
本篇内容来自于书籍《3D图形学基础:图形与游戏开发》,个人总结
1.数学背景与历史
笛卡尔数学由著名的法国哲学家、物理学家、生物学家、数学家"勒奈·笛卡尔"发明。
1.1 1D数学

1.1.1 名词解释
- 整数:
1,2,3,4,50,-70 - 自然数:
非负整数,1,2,5,100。 - 有理数:
一个整数除以另一个整数,可以除尽,结果为,1/2、3/4/、0.88。 - 无理数:
有些数无法用有理数表示,如圆周长与直径的比值,记作π(pai)。小数点后有无穷的数,除不尽的数。 - 实数:
有理数 + 无理数的范围,有理数可数,无理数不可数。 - 离散数学:
研究自然数和整数的领域。 - 连续数学:
研究实数的领域。
1.2 2D数学

1.2.1 简单介绍
- 二维可以理解为矩形的网格。
- 高中时我们用的一般坐标系:横轴左-x,横轴右+x,纵轴上+y,纵轴下-y
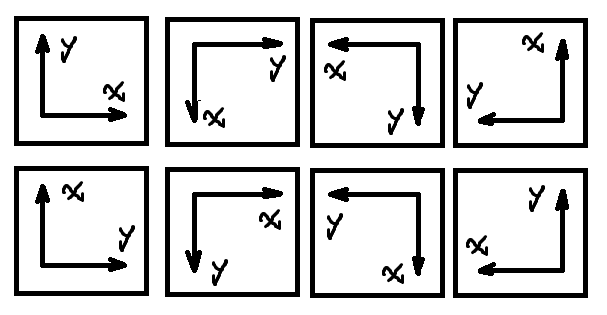
- 普通的坐标系,通过旋转变换,镜像变换,可以演化出8种坐标系,它们之间都是等价的。
1.3 3D数学:
1.3.1 2种三维坐标系
左手坐标系
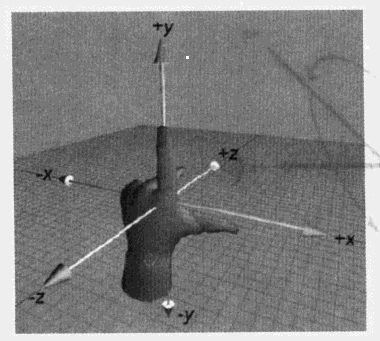
左手坐标系:拇指指向+x,食指指向+y,中指指向+z(远离自己的方向)右手坐标系

右手坐标系:拇指指向+x,食指指向+y,中指指向+z(远离自己的方向)- 左手坐标系经过旋转变化有24种,右手一样也有24种,总共有48种坐标系
“左手坐标系” 与 “右手坐标系”不是等价的。
下文都用一般的左手坐标系
2.多坐标系统

- 世界坐标系
- 物体坐标系
- 惯性坐标系
- 摄像机坐标系
3.向量
3.1 简单概念
向量:
“速度”和“位移”是向量,有大小有方向的量叫向量,向量描述位移。标量:
“速率”和“长度”是标量,没有方向,向量的绝对值,标量描述数量。
3.2 向量的2种写法
一般用小写字母表示一个向量,比如 v。
行向量:
\(v=[2,3]\) (2D)
\(v=[5,-5,7]\) (3D)
\(v=[1,4,8,7]\) (4D)可以省略逗号
\[v=\begin{bmatrix} 2&3 \end{bmatrix}\]列向量:
\[v=\begin{bmatrix} 2\\3 \end{bmatrix}\]
注意:这2种写法没有优劣之分,一般情况下用“行向量”,因为书写方便
3.3 2D、3D、4D向量下标字母表示
2D:
\(v=[v_{x},v_{y}]\)
3D:
\(v=[v_{x},v_{y},v_{z}]\)
4D:
\(v=[v_{x},v_{y},v_{z},v_{w}]\) (w是分量)
3.4 向量的几何意义
二维向量\(v=[2,3]\)可以理解为,在二维坐标系中,从原点开始,先向+x走2步,再向+y走3步到终点,连接原点与终点。
三维向量\(v=[2,4,5]\)可以理解为,在三维坐标系中,从原点开始,先向+x走2步,再向+y走4步,再向+z走5步,连接原点与终点。
向量相当于表示,位移的序列。
向量与点:
“点”描述位置,\((2,3)\)是“点”,
“向量”描述位移,\([2,3]\)是“向量”。
4.向量运算
4.1 零向量
可以理解为“没有位移”,标量零表示“没有数量”
4.2 向量变负
几何上可以理解为,向量的方向相反,2D,3D,4D坐标系的操作分别是
- \(-v=-[x,y]=[-x,-y]\)
- \(-v=-[x,y,z]=[-x,-y,-z]\)
- \(-v=-[x,y,z,w]=[-x,-y,-z,-w]\)
4.3 求模运算
求模运算,也就是求向量的大小,向量大小也称为“向量长度”,或“模”。比如有个向量 \(v\),向量标量的绝对值两边加单数线,就是向量长度,记作"\(\begin{Vmatrix}v\end{Vmatrix}\)"
公式:
\(\begin{Vmatrix}v\end{Vmatrix}=\sqrt{v_{x}^{2}+v_{y}^{2}}\) (2D)
\(\begin{Vmatrix}v\end{Vmatrix}=\sqrt{v_{x}^{2}+v_{y}^{2}+v_{z}^{2}}\) (3D)
几何意义:2D的坐标系中,可以用勾股定理解释;3D的证明很复杂,不讨论。
4.4 标量与向量的乘法(除法):
公式:
乘法
\(kv=k[v_{x},v_{y}]=[kv_{x},kv_{y}]\) (2D)
\(kv=k[v_{x},v_{y},v_{z}]=[kv_{x},kv_{y},kv_{z}]\) (3D)
除法
\[\frac{1}{k}=\frac{1}{k}[v_{x},v_{y}]=[\frac{1}{k}v_{x},\frac{1}{k}v_{y}]\]
\[\frac{1}{k}=\frac{1}{k}[v_{x},v_{y},v_{z}]=[\frac{1}{k}v_{x},\frac{1}{k}v_{y},\frac{1}{k}v_{z}]\]
4.5 标准化向量
标准化向量一般用向量名\(v\),加下标norm组成,记作“ \(v_{norm}\) ”,这个过程称为“标准化”。
公式:
\(v_{norm}=v/\begin{Vmatrix}v\end{Vmatrix}\)
举个例子:
\[v=[12,5]\\v_{norm} =\frac{[12,5]} {\begin{Vmatrix}[12,5]\end{Vmatrix}}\\=\frac{[12,5]}{\sqrt{12^2+5^2}} \\ =\frac{[12,5]}{13}\\ \approx[0.923,0.385]\]
几何意义:可以从上面的例子中看出,在2D中的标准化后的向量是一个从原点出发,模为1的向量。
4.6 向量加减法
向量\(a\)与向量\(b\)相加时,可以理解为,A的终点接到B的起点,接着从A的起点指向B的终点就是两向量相加的结果;向量\(a\)与向量\(b\)在相减时,可以理解为,B的终点指向A的终点的向量就是两向量相减的结果。
(图)
公式:
\(a+b=[a_{x},a_{y}]+[b_{x},b_{y}]=[a_{x}+b_{x},a_{y}+b_{y}]\) (2D)
\(a-b=[a_{x},a_{y}]-[b_{x},b_{y}]=[a_{x}-b_{x},a_{y}-b_{y}]\) (2D)
\(a+b=[a_{x},a_{y},a_{z}]+[b_{x},b_{y},b_{z}]=[a_{x}+b_{x},a_{y}+b_{y},a_{z}+b_{z}]\) (3D)
\(a-b=[a_{x},a_{y},a_{z}]-[b_{x},b_{y},b_{z}]=[a_{x}-b_{x},a_{y}-b_{y},a_{z}-b_{z}]\) (3D)
注意:
- 向量加法满足交换律,向量减法不满足交换律
永远有\(a+b=b+a\)
但\(a-b=-(b-a)\)仅当\(a=b\)时,\(a-b=b-a\)
4.7 两点间距离公式
公式:
\(距离(a,b)=\sqrt{(b_{x}-a_{x})^2+(b_{y}-a_{y})^2}\) (2D)
\(距离(a,b)=\sqrt{(b_{x}-a_{x})^2+(b_{y}-a_{y})^2+(b_{z}-a_{z})^2}\) (3D)
4.8 向量点乘
也称作“内积”,结果在几何中表示2个向量的“相似”程度,\(a\)点乘\(b\),记作“ \(a·b\) ”,点不能省略,结果是其夹角的cos值,若结果>0,则夹角\(0<=\theta<90\);若结果=0,则夹角\(\theta\)=90;若结果<0,则夹角\(\theta\)>90
公式1:
\(a·b = a_{x}b_{x} + a_{y}b_{y}\) (2D)
\(a·b = a_{x}b_{x} + a_{y}b_{y}+a_{z}b_{z}\) (2D)
公式2:
\(a·b = ||a|| \quad ||b||\quad \cos { (\theta )}\)
有用的推导:用点乘计算2个向量的夹角
\[\theta = \arccos{( \frac{a·b}{\begin{Vmatrix}a\end{Vmatrix}\begin{Vmatrix}b\end{Vmatrix}})}\]
4.9 向量投影
求向量\(v\)在向量\(n\)上的投影,能将\(v\)分解为两个分量:\(v_{\bot}\)和\(v_{\vert\vert}\)。他们分别垂直于和平行于\(n\),并满足\(v=v_{\bot}+v_{\vert\vert}\)。一般称平行分量\(v_{\vert\vert}\)为\(v\)在\(n\)上的投影。
\[v_{平行}=v_{\vert\vert}= n\frac{v·n}{\begin{Vmatrix}n\end{Vmatrix}^2}\]
\[v_{垂直}=v_{\bot}= \begin{Vmatrix}v\end{Vmatrix}-n\frac{v·n}{\begin{Vmatrix}n\end{Vmatrix}^2}\]
4.10 向量叉乘
又称作“叉积”,叉乘的结果是一个向量,该向量垂直于2个叉乘向量组成的平面
公式1:
\(a=[a_{x},a_{y},a_{z}]\)
\(b=[b_{x},b_{y},b_{z}]\)
\(a\times b=[(a_{y}b_{z}-a_{z}b_{y}),(a_{z}b_{x}-a_{x}b_{z}),(a_{x}b_{y}-a_{y}b_{x})]\)
向量叉乘后向量的长度,为2向量的夹角θsin值与2向量长度的积,这个长度也是a和b向量组成平行四边形的面积
公式2:
\(\begin{Vmatrix}a\times b\end{Vmatrix} = \begin{Vmatrix}a\end{Vmatrix}\begin{Vmatrix}b\end{Vmatrix}\sin{(\theta)}\)
- 叉乘结果向量的方向
在左手坐标系中,若叉乘的两向量收尾相接后是顺时针,则指向你;若叉乘的两向量收尾相接后是逆时针,则远离你;右手坐标系则相反
5.Vector3类型
关于这个类型的实现,每一种语言都有不同的实现方式,从书中看到的结果是,定义了Vector3类有自己的构造方法,并且对常用的运算符进行重载,加了一些常用方法。
我相信,在unity中的Vector3也有相应的操作,比如点乘操作用方法来表现,而不是去重载“*”算符。
这个类基本上游戏引擎都会实现。