OpenCV+海康威视摄像头的实时读取
OpenCV+海康威视摄像头的实时读取
本文由 @lonelyrains出品,转载请注明出处。
文章链接: http://blog.csdn.net/lonelyrains/article/details/50350052
环境
- 硬件:
PC:i7-4970 16GB内存 摄像头型号:DS-2CD3310D-I(2.8mm) - 软件:
windows-x64、vs2012、opencv2.4.8、hkvision5114-x64版本库
配置
- 保证使用SADP工具可以识别摄像头,然后配置IP与电脑在同一个网段。

- 再保证可以从浏览器中访问。账号密码默认的一般是admin、a123456789(老版本的摄像头密码是12345)。

登录成功后可能要求下载WebComponent控件,下载好了安装便是。如果仍然出现如下画面:

则换一种浏览器试。一般是默认浏览器没问题的。

- 配置使用sdk中自带的ClientDemo.exe工具可以访问


- 配置sdk开发环境
– opencv的配置
这里不展开讲opencv的配置,仅说明需要配置opencv环境变量、设置好对应的vs开发环境的属性配置


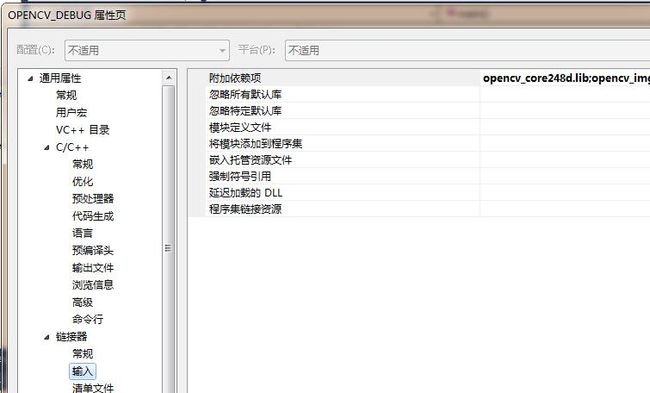
– 海康威视sdk属性配置
因为是64位环境,为了增强属性配置的内聚性,单独添加新项目属性表,设置海康威视sdk的属性




依赖库写全,为:
HCNetSDK.lib;PlayCtrl.lib;ws2_32.lib;winmm.lib;GdiPlus.lib;IPHlpApi.Lib;%(AdditionalDependencies)
代码及说明
#include <opencv\cv.h>
#include <opencv\highgui.h>
#include <iostream>
#include <cstdio>
#include <cstring>
#include <iostream>
#include <windows.h>
#include <HCNetSDK.h>
/*#include "PlayM4.h"*/
#include <plaympeg4.h>
#include <opencv2\opencv.hpp>
#include <time.h>
#include "global.h"
#include "readCamera.h"
#define USECOLOR 1
using namespace cv;
using namespace std;
//--------------------------------------------
int iPicNum=0;//Set channel NO.
LONG nPort=-1;
HWND hWnd=NULL;
void yv12toYUV(char *outYuv, char *inYv12, int width, int height,int widthStep)
{
int col,row;
unsigned int Y,U,V;
int tmp;
int idx;
//printf("widthStep=%d.\n",widthStep);
for (row=0; row<height; row++)
{
idx=row * widthStep;
int rowptr=row*width;
for (col=0; col<width; col++)
{
//int colhalf=col>>1;
tmp = (row/2)*(width/2)+(col/2);
// if((row==1)&&( col>=1400 &&col<=1600))
// {
// printf("col=%d,row=%d,width=%d,tmp=%d.\n",col,row,width,tmp);
// printf("row*width+col=%d,width*height+width*height/4+tmp=%d,width*height+tmp=%d.\n",row*width+col,width*height+width*height/4+tmp,width*height+tmp);
// }
Y=(unsigned int) inYv12[row*width+col];
U=(unsigned int) inYv12[width*height+width*height/4+tmp];
V=(unsigned int) inYv12[width*height+tmp];
// if ((col==200))
// {
// printf("col=%d,row=%d,width=%d,tmp=%d.\n",col,row,width,tmp);
// printf("width*height+width*height/4+tmp=%d.\n",width*height+width*height/4+tmp);
// return ;
// }
if((idx+col*3+2)> (1200 * widthStep))
{
//printf("row * widthStep=%d,idx+col*3+2=%d.\n",1200 * widthStep,idx+col*3+2);
}
outYuv[idx+col*3] = Y;
outYuv[idx+col*3+1] = U;
outYuv[idx+col*3+2] = V;
}
}
//printf("col=%d,row=%d.\n",col,row);
}
//解码回调 视频为YUV数据(YV12),音频为PCM数据
void CALLBACK DecCBFun(long nPort,char * pBuf,long nSize,FRAME_INFO * pFrameInfo, long nReserved1,long nReserved2)
{
long lFrameType = pFrameInfo->nType;
if(lFrameType ==T_YV12)
{
#if USECOLOR
//int start = clock();
static IplImage* pImgYCrCb = cvCreateImage(cvSize(pFrameInfo->nWidth,pFrameInfo->nHeight), 8, 3);//得到图像的Y分量
yv12toYUV(pImgYCrCb->imageData, pBuf, pFrameInfo->nWidth,pFrameInfo->nHeight,pImgYCrCb->widthStep);//得到全部RGB图像
static IplImage* pImg = cvCreateImage(cvSize(pFrameInfo->nWidth,pFrameInfo->nHeight), 8, 3);
cvCvtColor(pImgYCrCb,pImg,CV_YCrCb2RGB);
//int end = clock();
#else
static IplImage* pImg = cvCreateImage(cvSize(pFrameInfo->nWidth,pFrameInfo->nHeight), 8, 1);
memcpy(pImg->imageData,pBuf,pFrameInfo->nWidth*pFrameInfo->nHeight);
#endif
//printf("%d\n",end-start);
Mat frametemp(pImg),frame;
//frametemp.copyTo(frame);
// cvShowImage("IPCamera",pImg);
// cvWaitKey(1);
EnterCriticalSection(&g_cs_frameList);
g_frameList.push_back(frametemp);
LeaveCriticalSection(&g_cs_frameList);
#if USECOLOR
// cvReleaseImage(&pImgYCrCb);
// cvReleaseImage(&pImg);
#else
/*cvReleaseImage(&pImg);*/
#endif
//此时是YV12格式的视频数据,保存在pBuf中,可以fwrite(pBuf,nSize,1,Videofile);
//fwrite(pBuf,nSize,1,fp);
}
/*************** else if (lFrameType ==T_AUDIO16) { //此时是音频数据,数据保存在pBuf中,可以fwrite(pBuf,nSize,1,Audiofile); } else { } *******************/
}
///实时流回调
void CALLBACK fRealDataCallBack(LONG lRealHandle,DWORD dwDataType,BYTE *pBuffer,DWORD dwBufSize,void *pUser)
{
DWORD dRet;
switch (dwDataType)
{
case NET_DVR_SYSHEAD: //系统头
if (!PlayM4_GetPort(&nPort)) //获取播放库未使用的通道号
{
break;
}
if(dwBufSize > 0)
{
if (!PlayM4_OpenStream(nPort,pBuffer,dwBufSize,1024*1024))
{
dRet=PlayM4_GetLastError(nPort);
break;
}
//设置解码回调函数 只解码不显示
if (!PlayM4_SetDecCallBack(nPort,DecCBFun))
{
dRet=PlayM4_GetLastError(nPort);
break;
}
//设置解码回调函数 解码且显示
//if (!PlayM4_SetDecCallBackEx(nPort,DecCBFun,NULL,NULL))
//{
// dRet=PlayM4_GetLastError(nPort);
// break;
//}
//打开视频解码
if (!PlayM4_Play(nPort,hWnd))
{
dRet=PlayM4_GetLastError(nPort);
break;
}
//打开音频解码, 需要码流是复合流
// if (!PlayM4_PlaySound(nPort))
// {
// dRet=PlayM4_GetLastError(nPort);
// break;
// }
}
break;
case NET_DVR_STREAMDATA: //码流数据
if (dwBufSize > 0 && nPort != -1)
{
BOOL inData=PlayM4_InputData(nPort,pBuffer,dwBufSize);
while (!inData)
{
Sleep(10);
inData=PlayM4_InputData(nPort,pBuffer,dwBufSize);
OutputDebugString(L"PlayM4_InputData failed \n");
}
}
break;
}
}
void CALLBACK g_ExceptionCallBack(DWORD dwType, LONG lUserID, LONG lHandle, void *pUser)
{
char tempbuf[256] = {0};
switch(dwType)
{
case EXCEPTION_RECONNECT: //预览时重连
printf("----------reconnect--------%d\n", time(NULL));
break;
default:
break;
}
}
unsigned readCamera(void *param)
{
//---------------------------------------
// 初始化
NET_DVR_Init();
//设置连接时间与重连时间
NET_DVR_SetConnectTime(2000, 1);
NET_DVR_SetReconnect(10000, true);
//---------------------------------------
// 获取控制台窗口句柄
//HMODULE hKernel32 = GetModuleHandle((LPCWSTR)"kernel32");
//GetConsoleWindow = (PROCGETCONSOLEWINDOW)GetProcAddress(hKernel32,"GetConsoleWindow");
//---------------------------------------
// 注册设备
LONG lUserID;
NET_DVR_DEVICEINFO_V30 struDeviceInfo;
lUserID = NET_DVR_Login_V30("192.168.2.64", 8000, "admin", "a123456789", &struDeviceInfo);
if (lUserID < 0)
{
printf("Login error, %d\n", NET_DVR_GetLastError());
NET_DVR_Cleanup();
return -1;
}
//---------------------------------------
//设置异常消息回调函数
NET_DVR_SetExceptionCallBack_V30(0, NULL,g_ExceptionCallBack, NULL);
//cvNamedWindow("IPCamera");
//---------------------------------------
//启动预览并设置回调数据流
NET_DVR_CLIENTINFO ClientInfo;
ClientInfo.lChannel = 1; //Channel number 设备通道号
ClientInfo.hPlayWnd = NULL; //窗口为空,设备SDK不解码只取流
ClientInfo.lLinkMode = 0; //Main Stream
ClientInfo.sMultiCastIP = NULL;
LONG lRealPlayHandle;
lRealPlayHandle = NET_DVR_RealPlay_V30(lUserID,&ClientInfo,fRealDataCallBack,NULL,TRUE);
if (lRealPlayHandle<0)
{
printf("NET_DVR_RealPlay_V30 failed! Error number: %d\n",NET_DVR_GetLastError());
return 0;
}
//cvWaitKey(0);
Sleep(-1);
//fclose(fp);
//---------------------------------------
//关闭预览
if(!NET_DVR_StopRealPlay(lRealPlayHandle))
{
printf("NET_DVR_StopRealPlay error! Error number: %d\n",NET_DVR_GetLastError());
return 0;
}
//注销用户
NET_DVR_Logout(lUserID);
NET_DVR_Cleanup();
return 0;
}其中最终得到的帧保存在g_frameList.push_back(frametemp);中。前后设置了对应的锁,用来对该帧序列的读写进行保护。这一部分内容是要自己完成的。即定义变量:
CRITICAL_SECTION g_cs_frameList;
std::listg_frameList;
主函数中的调用代码,先建立线程,调用上述读摄像头的函数的回调,并把读到的帧序列保存在g_frameList中,然后再读取该序列,保存到Mat里即可:
int main()
{
HANDLE hThread;
unsigned threadID;
Mat frame1;
InitializeCriticalSection(&g_cs_frameList);
hThread = (HANDLE)_beginthreadex( NULL, 0, &readCamera, NULL, 0, &threadID );
...
EnterCriticalSection(&g_cs_frameList);
if(g_frameList.size())
{
list<Mat>::iterator it;
it = g_frameList.end();
it--;
Mat dbgframe = (*(it));
//imshow("frame from camera",dbgframe);
//dbgframe.copyTo(frame1);
//dbgframe.release();
(*g_frameList.begin()).copyTo(frame[i]);
frame1 = dbgframe;
g_frameList.pop_front();
}
g_frameList.clear(); // 丢掉旧的帧
LeaveCriticalSection(&g_cs_frameList);
...
return 0;
}