一步步学算法(算法分析)---6(贪心算法)
这个总结的很详细。在学习过程中帮了我很大的忙。
贪心算法
顾名思义,贪心算法总是作出在当前看来最好的选择。也就是说贪心算法并不从整体最优考虑,它所作出的选择只是在某种意义上的局部最优选择。当然,希望贪心算法得到的最终结果也是整体最优的。虽然贪心算法不能对所有问题都得到整体最优解,但对许多问题它能产生整体最优解。如单源最短路经问题,最小生成树问题等。在一些情况下,即使贪心算法不能得到整体最优解,其最终结果却是最优解的很好近似。
问题一、活动安排问题
问题表述:设有n个活动的集合E = {1,2,…,n},其中每个活动都要求使用同一资源,如演讲会场等,而在同一时间内只有一个活动能使用这一资源。每个活i都有一个要求使用该资源的起始时间si和一个结束时间fi,且si < fi 。如果选择了活动i,则它在半开时间区间[si, fi)内占用资源。若区间[si, fi)与区间[sj, fj)不相交,则称活动i与活动j是相容的。也就是说,当si >= fj或sj >= fi时,活动i与活动j相容。
由于输入的活动以其完成时间的非减序排列,所以算法greedySelector每次总是选择具有最早完成时间的相容活动加入集合A中。直观上,按这种方法选择相容活动为未安排活动留下尽可能多的时间。也就是说,该算法的贪心选择的意义是使剩余的可安排时间段极大化,以便安排尽可能多的相容活动。
算法greedySelector的效率极高。当输入的活动已按结束时间的非减序排列,算法只需O(n)的时间安排n个活动,使最多的活动能相容地使用公共资源。如果所给出的活动未按非减序排列,可以用O(nlogn)的时间重排。
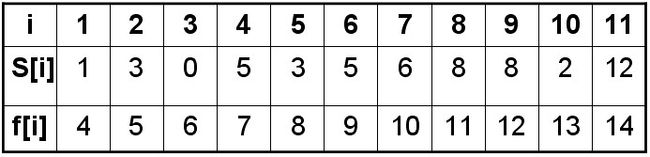
例:设待安排的11个活动的开始时间和结束时间按结束时间的非减序排列如下:
算法greedySelector 的计算过程如下图所示。图中每行相应于算法的一次迭代。阴影长条表示的活动是已选入集合A的活动,而空白长条表示的活动是当前正在检查相容性的活动。
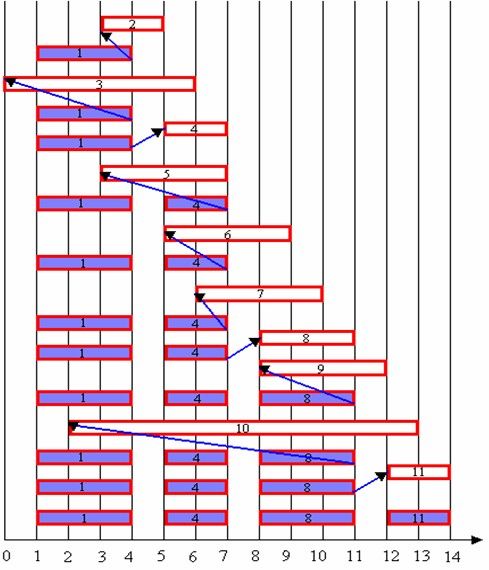
若被检查的活动i的开始时间Si小于最近选择的活动j的结束时间fi,则不选择活动i,否则选择活动i加入集合A中。
贪心算法并不总能求得问题的整体最优解。但对于活动安排问题,贪心算法greedySelector却总能求得的整体最优解,即它最终所确定的相容活动集合A的规模最大。这个结论可以用数学归纳法证明。
活动安排问题实现:
代码
/* 主题:活动安排问题
* 开发语言:C++
* 开发环境:Vicrosoft Visual Studio
*/
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std ;
struct ActivityTime
{
public:
ActivityTime (int nStart, int nEnd)
: m_nStart (nStart), m_nEnd (nEnd)
{ }
ActivityTime ()
: m_nStart (0), m_nEnd (0)
{ }
friend
bool operator < (const ActivityTime& lth, const ActivityTime& rth)
{
return lth.m_nEnd < lth.m_nEnd ;
}
public:
int m_nStart ;
int m_nEnd ;
} ;
class ActivityArrange
{
public:
ActivityArrange (const vector<ActivityTime>& vTimeList)
{
m_vTimeList = vTimeList ;
m_nCount = vTimeList.size () ;
m_bvSelectFlag.resize (m_nCount, false) ;
}
// 活动安排
void greedySelector ()
{
__sortTime () ;
// 第一个活动一定入内
m_bvSelectFlag[0] = true ;
int j = 0 ;
for (int i = 1; i < m_nCount ; ++ i) {
if (m_vTimeList[i].m_nStart > m_vTimeList[j].m_nEnd) {
m_bvSelectFlag[i] = true ;
j = i ;
}
}
copy (m_bvSelectFlag.begin(), m_bvSelectFlag.end() ,ostream_iterator<bool> (cout, " "));
cout << endl ;
}
private:
// 按照活动结束时间非递减排序
void __sortTime ()
{
sort (m_vTimeList.begin(), m_vTimeList.end()) ;
for (vector<ActivityTime>::iterator ite = m_vTimeList.begin() ;
ite != m_vTimeList.end() ;
++ ite) {
cout << ite->m_nStart << ", "<< ite ->m_nEnd << endl ;
}
}
private:
vector<ActivityTime> m_vTimeList ; // 活动时间安排列表
vector<bool> m_bvSelectFlag ;// 是否安排活动标志
int m_nCount ; // 总活动个数
} ;
int main()
{
vector<ActivityTime> vActiTimeList ;
vActiTimeList.push_back (ActivityTime(1, 4)) ;
vActiTimeList.push_back (ActivityTime(3, 5)) ;
vActiTimeList.push_back (ActivityTime(0, 6)) ;
vActiTimeList.push_back (ActivityTime(5, 7)) ;
vActiTimeList.push_back (ActivityTime(3, 8)) ;
vActiTimeList.push_back (ActivityTime(5, 9)) ;
vActiTimeList.push_back (ActivityTime(6, 10)) ;
vActiTimeList.push_back (ActivityTime(8, 11)) ;
vActiTimeList.push_back (ActivityTime(8, 12)) ;
vActiTimeList.push_back (ActivityTime(2, 13)) ;
vActiTimeList.push_back (ActivityTime(12, 14)) ;
ActivityArrange aa (vActiTimeList) ;
aa.greedySelector () ;
return 0 ;
}
贪心算法的基本要素
对于一个具体的问题,怎么知道是否可用贪心算法解此问题,以及能否得到问题的最优解呢?这个问题很难给予肯定的回答。
但是,从许多可以用贪心算法求解的问题中看到这类问题一般具有2个重要的性质:贪心选择性质和最优子结构性质。
1、贪心选择性质
所谓贪心选择性质是指所求问题的整体最优解可以通过一系列局部最优的选择,即贪心选择来达到。这是贪心算法可行的第一个基本要素,也是贪心算法与动态规划算法的主要区别。
动态规划算法通常以自底向上的方式解各子问题,而贪心算法则通常以自顶向下的方式进行,以迭代的方式作出相继的贪心选择,每作一次贪心选择就将所求问题简化为规模更小的子问题。
对于一个具体问题,要确定它是否具有贪心选择性质,必须证明每一步所作的贪心选择最终导致问题的整体最优解。
2、最优子结构性质
当一个问题的最优解包含其子问题的最优解时,称此问题具有最优子结构性质。问题的最优子结构性质是该问题可用动态规划算法或贪心算法求解的关键特征。
3、贪心算法与动态规划算法的差异
贪心算法和动态规划算法都要求问题具有最优子结构性质,这是2类算法的一个共同点。但是,对于具有最优子结构的问题应该选用贪心算法还是动态规划算法求解?是否能用动态规划算法求解的问题也能用贪心算法求解?下面研究2个经典的组合优化问题,并以此说明贪心算法与动态规划算法的主要差别。
0-1背包问题:
给定n种物品和一个背包。物品i的重量是Wi,其价值为Vi,背包的容量为C。应如何选择装入背包的物品,使得装入背包中物品的总价值最大?
在选择装入背包的物品时,对每种物品i只有2种选择,即装入背包或不装入背包。不能将物品i装入背包多次,也不能只装入部分的物品i。
背包问题:
与0-1背包问题类似,所不同的是在选择物品i装入背包时,可以选择物品i的一部分,而不一定要全部装入背包,1 <= i <= n。
这2类问题都具有最优子结构性质,极为相似,但背包问题可以用贪心算法求解,而0-1背包问题却不能用贪心算法求解。
用贪心算法解背包问题的基本步骤:
首先计算每种物品单位重量的价值Vi/Wi,然后,依贪心选择策略,将尽可能多的单位重量价值最高的物品装入背包。若将这种物品全部装入背包后,背包内的物品总重量未超过C,则选择单位重量价值次高的物品并尽可能多地装入背包。依此策略一直地进行下去,直到背包装满为止。
伪代码:
void Knapsack(int n,float M,float v[],float w[],float x[])
{
Sort(n,v,w);
int i;
for (i = 1 ; i <= n ; i++)
x[i] = 0;
float c=M;
for (i=1;i<=n;i++) {
if (w[i] > c) break;
x[i]=1;
c-=w[i];
}
if (i <= n)
x[i]=c / w[i];
}
算法knapsack的主要计算时间在于将各种物品依其单位重量的价值从大到小排序。因此,算法的计算时间上界为 O(nlogn)。
为了证明算法的正确性,还必须证明背包问题具有贪心选择性质。
对于0-1背包问题,贪心选择之所以不能得到最优解是因为在这种情况下,它无法保证最终能将背包装满,部分闲置的背包空间使每公斤背包空间的价值降低了。事实上,在考虑0-1背包问题时,应比较选择该物品和不选择该物品所导致的最终方案,然后再作出最好选择。由此就导出许多互相重叠的子问题。这正是该问题可用动态规划算法求解的另一重要特征。实际上也是如此,动态规划算法的确可以有效地解0-1背包问题。
问题二、 哈夫曼编码
哈夫曼编码是广泛地用于数据文件压缩的十分有效的编码方法。其压缩率通常在20%~90%之间。哈夫曼编码算法用字符在文件中出现的频率表来建立一个用0,1串表示各字符的最优表示方式。
给出现频率高的字符较短的编码,出现频率较低的字符以较长的编码,可以大大缩短总码长。
|
|
a |
b |
c |
d |
e |
f |
| 频率(千次) |
45 |
13 |
12 |
16 |
9 |
5 |
| 定长码 |
000 |
001 |
010 |
011 |
100 |
101 |
| 变长码 |
0 |
101 |
100 |
111 |
1101 |
1100 |
定长码:
3*(45+13+12+16+9+5) = 300 千位
变长码:
1*45+3*13+3*12+3*16+4*9+4*5 = 224 千位
1、前缀码
对每一个字符规定一个0,1串作为其代码,并要求任一字符的代码都不是其它字符代码的前缀。这种编码称为前缀码。
编码的前缀性质可以使译码方法非常简单。
表示最优前缀码的二叉树总是一棵完全二叉树,即树中任一结点都有2个儿子结点。
f(c)表示字符c出现的概率,dt(c)表示c的码长
平均码长定义为:
使平均码长达到最小的前缀码编码方案称为给定编码字符集C的最优前缀码。
2、构造哈夫曼编码
哈夫曼提出构造最优前缀码的贪心算法,由此产生的编码方案称为哈夫曼编码。
哈夫曼算法以自底向上的方式构造表示最优前缀码的二叉树T。
算法以|C|个叶结点开始,执行|C|-1次的“合并”运算后产生最终所要求的树T。
以f为键值的优先队列Q用在贪心选择时有效地确定算法当前要合并的2棵具有最小频率的树。一旦2棵具有最小频率的树合并后,产生一棵新的树,其频率为合并的2棵树的频率之和,并将新树插入优先队列Q。经过n-1次的合并后,优先队列中只剩下一棵树,即所要求的树T。
算法huffmanTree用最小堆实现优先队列Q。初始化优先队列需要O(n)计算时间,由于最小堆的removeMin和put运算均需O(logn)时间,n-1次的合并总共需要O(nlogn)计算时间。因此,关于n个字符的哈夫曼算法的计算时间为O(nlogn) 。
3、哈夫曼算法的正确性
要证明哈夫曼算法的正确性,只要证明最优前缀码问题具有贪心选择性质和最优子结构性质。
(1)贪心选择性质
(2)最优子结构性质
实现:
代码
/* 主题: Haffman编码
* 开发环境 : Microsoft Visual Studio 2008
*/
#include <iostream>
#include <vector>
#include <queue>
using namespace std ;
class HaffmanNode
{
public:
HaffmanNode (int nKeyValue,
HaffmanNode* pLeft = NULL,
HaffmanNode* pRight = NULL)
{
m_nKeyValue = nKeyValue ;
m_pLeft = pLeft ;
m_pRight = pRight ;
}
friend
bool operator < (const HaffmanNode& lth, const HaffmanNode& rth)
{
return lth.m_nKeyValue < rth.m_nKeyValue ;
}
public:
int m_nKeyValue ;
HaffmanNode* m_pLeft ;
HaffmanNode* m_pRight ;
} ;
class HaffmanCoding
{
public:
typedef priority_queue<HaffmanNode*> MinHeap ;
typedef HaffmanNode* HaffmanTree ;
public:
HaffmanCoding (const vector<int>& weight)
: m_pTree(NULL)
{
m_stCount = weight.size () ;
for (size_t i = 0; i < weight.size() ; ++ i) {
m_minheap.push (new HaffmanNode(weight[i], NULL, NULL)) ;
}
}
~ HaffmanCoding()
{
__destroy (m_pTree) ;
}
// 按照左1右0编码
void doHaffmanCoding ()
{
vector<int> vnCode(m_stCount-1) ;
__constructTree () ;
__traverse (m_pTree, 0, vnCode) ;
}
private:
void __destroy(HaffmanTree& ht)
{
if (ht->m_pLeft != NULL) {
__destroy (ht->m_pLeft) ;
}
if (ht->m_pRight != NULL) {
__destroy (ht->m_pRight) ;
}
if (ht->m_pLeft == NULL && ht->m_pRight == NULL) {
// cout << "delete" << endl ;
delete ht ;
ht = NULL ;
}
}
void __traverse (HaffmanTree ht,int layers, vector<int>& vnCode)
{
if (ht->m_pLeft != NULL) {
vnCode[layers] = 1 ;
__traverse (ht->m_pLeft, ++ layers, vnCode) ;
-- layers ;
}
if (ht->m_pRight != NULL) {
vnCode[layers] = 0 ;
__traverse (ht->m_pRight, ++ layers, vnCode) ;
-- layers ;
}
if (ht->m_pLeft == NULL && ht->m_pRight == NULL) {
cout << ht->m_nKeyValue << " coding: " ;
for (int i = 0; i < layers; ++ i) {
cout << vnCode[i] << " " ;
}
cout << endl ;
}
}
void __constructTree ()
{
size_t i = 1 ;
while (i < m_stCount) {
HaffmanNode* lchild = m_minheap.top () ;
m_minheap.pop () ;
HaffmanNode* rchild = m_minheap.top () ;
m_minheap.pop () ;
// 确保左子树的键值大于有子树的键值
if (lchild->m_nKeyValue < rchild->m_nKeyValue) {
HaffmanNode* temp = lchild ;
lchild = rchild ;
rchild = temp ;
}
// 构造新结点
HaffmanNode* pNewNode =
new HaffmanNode (lchild->m_nKeyValue + rchild->m_nKeyValue,
lchild, rchild ) ;
m_minheap.push (pNewNode) ;
++ i ;
}
m_pTree = m_minheap.top () ;
m_minheap.pop () ;
}
private:
vector<int> m_vnWeight ; // 权值
HaffmanTree m_pTree ;
MinHeap m_minheap ;
size_t m_stCount ; // 叶结点个数
} ;
int main()
{
vector<int> vnWeight ;
vnWeight.push_back (45) ;
vnWeight.push_back (13) ;
vnWeight.push_back (12) ;
vnWeight.push_back (16) ;
vnWeight.push_back (9) ;
vnWeight.push_back (5) ;
HaffmanCoding hc (vnWeight) ;
hc.doHaffmanCoding () ;
return 0 ;
}
问题三、单源最大路径
给定带权有向图G =(V,E),其中每条边的权是非负实数。另外,还给定V中的一个顶点,称为源。现在要计算从源到所有其它各顶点的最短路长度。这里路的长度是指路上各边权之和。这个问题通常称为单源最短路径问题。
1、算法基本思想
Dijkstra算法是解单源最短路径问题的贪心算法。
其基本思想是,设置顶点集合S并不断地作贪心选择来扩充这个集合。一个顶点属于集合S当且仅当从源到该顶点的最短路径长度已知。
初始时,S中仅含有源。设u是G的某一个顶点,把从源到u且中间只经过S中顶点的路称为从源到u的特殊路径,并用数组dist记录当前每个顶点所对应的最短特殊路径长度。Dijkstra算法每次从V-S中取出具有最短特殊路长度的顶点u,将u添加到S中,同时对数组dist作必要的修改。一旦S包含了所有V中顶点,dist就记录了从源到所有其它顶点之间的最短路径长度。
例如,对下图中的有向图,应用Dijkstra算法计算从源顶点1到其它顶点间最短路径的过程列在下表中。

Dijkstra算法的迭代过程:
| 迭代 |
s |
u |
dist[2] |
dist[3] |
dist[4] |
dist[5] |
| 初始 |
{1} |
- |
10 |
maxint |
30 |
100 |
| 1 |
{1,2} |
2 |
10 |
60 |
30 |
100 |
| 2 |
{1,2,4} |
4 |
10 |
50 |
30 |
90 |
| 3 |
{1,2,4,3} |
3 |
10 |
50 |
30 |
60 |
| 4 |
{1,2,4,3,5} |
5 |
10 |
50 |
30 |
60 |
2、算法的正确性和计算复杂性
(1)贪心选择性质
(2)最优子结构性质
(3)计算复杂性
对于具有n个顶点和e条边的带权有向图,如果用带权邻接矩阵表示这个图,那么Dijkstra算法的主循环体需要O(n)时间。这个循环需要执行n-1次,所以完成循环需要O(n)时间。算法的其余部分所需要时间不超过O(n^2)。
实现:
/* 主题: Dijkastra算法
* 开发环境 : Microsoft Visual Studio 2008
* 时间 : 2010.11.23
*/
#include <iostream>
#include <vector>
#include <limits>
using namespace std ;
class BBShortestDijkstra
{
public:
BBShortestDijkstra (const vector<vector<int> >& vnGraph)
:m_cnMaxInt (numeric_limits<int>::max())
{
m_vnGraph = vnGraph ;
m_stCount = vnGraph.size () ;
m_vnDist.resize (m_stCount) ;
for (size_t i = 0; i < m_stCount; ++ i) {
m_vnDist[i].resize (m_stCount) ;
}
}
void doDijkatra ()
{
int nMinIndex = 0 ;
int nMinValue = m_cnMaxInt ;
vector<bool> vbFlag (m_stCount, false) ;
for (size_t i = 0; i < m_stCount; ++ i) {
m_vnDist[0][i] = m_vnGraph[0][i] ;
if (nMinValue > m_vnGraph[0][i]) {
nMinValue = m_vnGraph[0][i] ;
nMinIndex = i ;
}
}
vbFlag[0] = true ;
size_t k = 1 ;
while (k < m_stCount) {
vbFlag[nMinIndex] = true ;
for (size_t j = 0; j < m_stCount ; ++ j) {
// 没有被选择
if (!vbFlag[j] && m_vnGraph[nMinIndex][j] != m_cnMaxInt ) {
if (m_vnGraph[nMinIndex][j] + nMinValue
< m_vnDist[k-1][j]) {
m_vnDist[k][j] = m_vnGraph[nMinIndex][j] + nMinValue ;
}
else {
m_vnDist[k][j] = m_vnDist[k-1][j] ;
}
}
else {
m_vnDist[k][j] = m_vnDist[k-1][j] ;
}
}
nMinValue = m_cnMaxInt ;
for (size_t j = 0; j < m_stCount; ++ j) {
if (!vbFlag[j] && (nMinValue > m_vnDist[k][j])) {
nMinValue = m_vnDist[k][j] ;
nMinIndex = j ;
}
}
++ k ;
}
for (int i = 0; i < m_stCount; ++ i) {
for (int j = 0; j < m_stCount; ++ j) {
if (m_vnDist[i][j] == m_cnMaxInt) {
cout << "maxint " ;
}
else {
cout << m_vnDist[i][j] << " " ;
}
}
cout << endl ;
}
}
private:
vector<vector<int> > m_vnGraph ;
vector<vector<int> > m_vnDist ;
size_t m_stCount ;
const int m_cnMaxInt ;
} ;
int main()
{
const int cnCount = 5 ;
vector<vector<int> > vnGraph (cnCount) ;
for (int i = 0; i < cnCount; ++ i) {
vnGraph[i].resize (cnCount, numeric_limits<int>::max()) ;
}
vnGraph[0][1] = 10 ;
vnGraph[0][3] = 30 ;
vnGraph[0][4] = 100 ;
vnGraph[1][2] = 50 ;
vnGraph[2][4] = 10 ;
vnGraph[3][2] = 20 ;
vnGraph[3][4] = 60 ;
BBShortestDijkstra bbs (vnGraph) ;
bbs.doDijkatra () ;
}